结果

然后直接放源码:
import cv2 as cv
source = cv.imread("zhaopian.jpg")
dst = cv.bilateralFilter(src=source, d=0, sigmaColor=30, sigmaSpace=15)
cv.imshow("source", source)
cv.imshow("dst", dst)
cv.waitKey()
cv.destroyAllWindows()
好了,本文结果部分介绍结束,想进一步了解一下原理的同学可以接着往下看了,没啥兴趣的可以左上角了。
双边滤波原理
上面的图片美颜效果其实使用的是 OpenCV 中为我们提供的双边滤波器,是一种图片降噪算法。
双边滤波(Bilateral filter)是一种非线性的滤波方法,本质是基于高斯滤波。
前面的文章介绍过,高斯滤波的方式会造成边缘模糊化,这是没办法的事情,这是高斯滤波过滤方式而导致的。
而双边滤波就是在高斯滤波的基础上,对高斯滤波的方式加以改进,结合图像的空间邻近度和像素值相似度的一种折处理,同时考虑 空域信息(domain) 和 值域信息(range) ,达到保边降噪的目的。
说人话就是双边滤波在进行滤波的过程中,不光要考虑周围像素值与中点像素值的大小之差,还需要考虑空间上的距离,进而确定该点对中间点的影响因子。
比如在一张图像中,相邻的像素点的颜色会非常相近,但是如果在边缘区域,相邻元素点的颜色变化会非常的大。
高斯过滤器的过滤过程中就是因为没有考虑边缘区域而导致过滤后图像边缘模糊,而双边滤波由于在过滤的过程中考虑到了周围像素值与中点像素值的差值大小,从而会确定一个影响因子,从而实现图片的保边降噪。
具体的实现原理如下:
希望你们的高中数学没有都还给你们的数学老师
整个双边滤波的算法分为两部分,一个是颜色值的相似度(值域核),公式如下:
$$
r(i, j, k, l) = exp( - \frac{||f(i, j) − f(k, l)||2}{2{\sigma2_r}} )
$$
另一个是计算空间距离的相似度(空域核),也就是说,离得越近,相似度越高,公式如下:
$$
d(i, j, k, l)=exp( - \frac{(i−k)^2 + (j−l)2}{2{\sigma2_d}})
$$
上面的逻辑还是很清晰,千万不要被一堆符号弄晕了。
这里 (i, j) 代表的是要处理的像素点的坐标点,而 (k,l) 则是要处理的范围内,可能影响到其值的像素点的坐标。
最终的权重系数 w(i,j,k,l) 取决于空域核和值域核的乘积,公式如下:
$$
w(i,j,k,l)=d(i,j,k,l) ∗ r(i,j,k,l) = exp( - \frac{(i−k)^2 + (j−l)2}{2{\sigma2_d}} - \frac{||f(i, j) − f(k, l)||2}{2{\sigma2_r}})
$$
下面是一个经典的双边滤波的原理示意图:
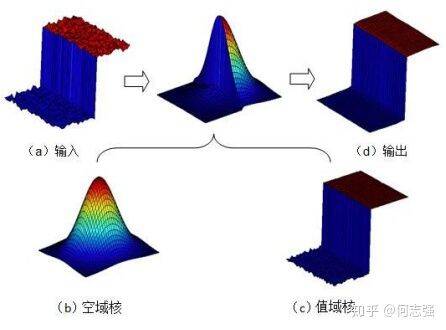
从这个图中可以看出,在图(b)空域核上,每个像素的权重是符合高斯分布的,而在图(c)的值域核上,由于像素取值相差过大,不同颜色的权重系数相差也很大,双边过滤过滤完成后,边缘两侧的像素点保留了原有的色彩值。
接下来还是看下双边滤波的原函数:
def bilateralFilter(src, d, sigmaColor, sigmaSpace, dst=None, borderType=None)
- src:原图
- d:像素邻域的直径。如果这个值设为非正数,那么 OpenCV 会从第五个参数 sigmaSpace 来将它计算出来。
- sigmaColor:颜色空间滤波器的 $\sigma$ 值。这个参数的值越大,就表明该像素邻域内有更宽广的颜色会被混合到一起,产生较大的半相等颜色区域。
- sigmaSpace:坐标空间中滤波器的 $\sigma$ 值,坐标空间的标注方差。他的数值越大,意味着越远的像素会相互影响,从而使更大的区域足够相似的颜色获取相同的颜色。当 d > 0 , d 指定了邻域大小且与 sigmaSpace 无关。否则, d 正比于 sigmaSpace 。使用过程中我发现这个值越大,图像的过渡效果越好。
源代码我就不放了,实际上只有那一行代码,不过希望看到本文的各位除了知道双边滤波能对图像进行美颜以外还是能稍微了解下原理。
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持易盾网络。