1.颜色空间转换(RGB转HSV) 为了较准确的调红色和绿色的HSV,我使用cv2.createTrackbar()函数创建了六个滚动条 #创建HSV最低滚动条cv2.createTrackbar('H_min','image',35,180,nothing)cv2.createTrackbar('S_
1.颜色空间转换(RGB转HSV)
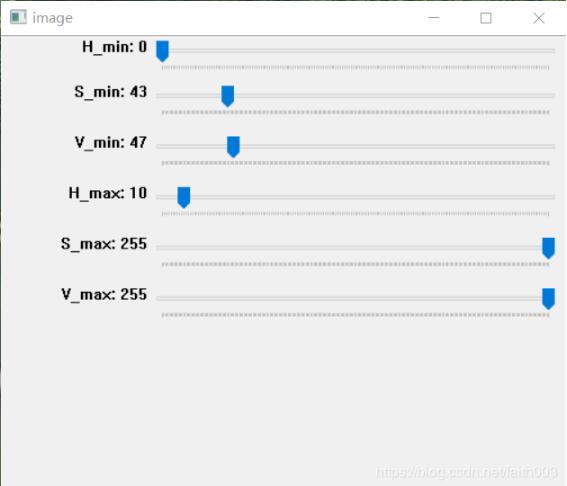
为了较准确的调红色和绿色的HSV,我使用cv2.createTrackbar()函数创建了六个滚动条
#创建HSV最低滚动条
cv2.createTrackbar('H_min','image',35,180,nothing)
cv2.createTrackbar('S_min','image',43,255,nothing)
cv2.createTrackbar('V_min','image',46,255,nothing)
#创建HSV最高滚动条
cv2.createTrackbar('H_max','image',0,180,nothing)
cv2.createTrackbar('S_max','image',255,255,nothing)
cv2.createTrackbar('V_max','image',255,255,nothing)
实际效果如图
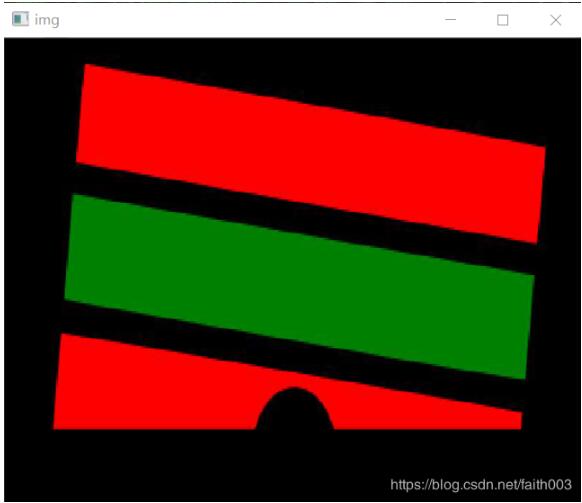
2.识别颜色并画矩形框
颜色阈值已经确定了,这就可以进行颜色识别了。
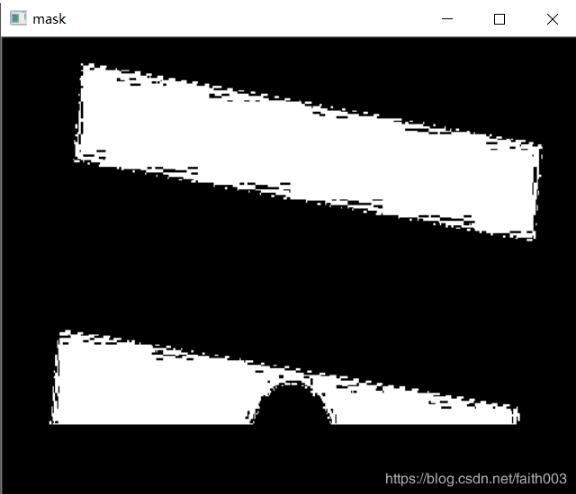
为了让识别更稳定,在代码中加入自适应阈值。
th_img = cv2.adaptiveThreshold(mask,255,cv2.ADAPTIVE_THRESH_MEAN_C,cv2.THRESH_BINARY_INV,5,2)
3.画矩形框
使用函数cv2.findContours()来检测物体轮框
再使用函数cv2.boundingRect()查找最小矩形框
使用函数cv2.rectangle()画出
contours_green,hierarchy = cv2.findContours(th_green,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE) contours_red,hierarchy = cv2.findContours(th_red,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE) for red in contours_red: x_red,y_red,w_red,h_red = cv2.boundingRect(red) if w_red>width|h_red>height: cv2.rectangle(img,(x_red,y_red),((x_red+h_red),(y_red+w_red)),(0,255,0),1) for red in contours_red: x_red,y_red,w_red,h_red = cv2.boundingRect(red) if w_red>width|h_red>height: cv2.rectangle(img,(x_red,y_red),((x_red+h_red),(y_red+w_red)),(0,255,0),1)
为了凸显出颜色的差距,我使用绿色的矩形框,画红色的物体,用红色的矩形框画绿色物体

以上这篇Python-opencv实现红绿两色识别操作就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持易盾网络。