步骤如下: 1.图片灰化; 2.中值滤波 去噪 3.求图片的光影(自动光学检测) 4.除法去光影 5.阈值操作 6.实现了三种目标检测方法 主要分两种连通区域和findContours 过程遇到了错误主要是
步骤如下:
1.图片灰化;
2.中值滤波 去噪
3.求图片的光影(自动光学检测)
4.除法去光影
5.阈值操作
6.实现了三种目标检测方法
主要分两种连通区域和findContours
过程遇到了错误主要是图片忘了灰化处理,随机颜色的问题。下面代码都已经进行了解决
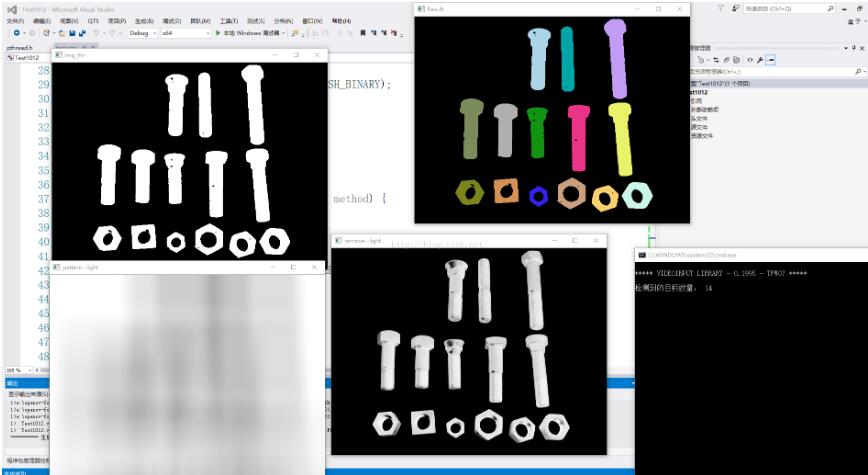
这是findContours的效果
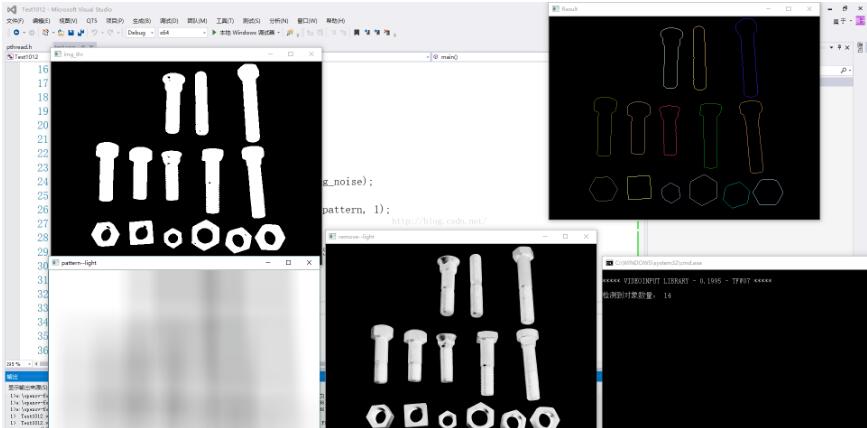
下面是连通区域的结果
#include <opencv2\core\utility.hpp>
#include <opencv2\imgproc.hpp>
#include <opencv2\highgui.hpp>
#include<opencv2\opencv.hpp>
#include <opencv2\core\core.hpp>
#include <opencv2\core\matx.hpp>
#include<string>
#include <iostream>
#include <limits>
using namespace std;
using namespace cv;
Mat img = imread("C:\\Users\\hasee\\Desktop\\luosi.jpg",0);
Mat removeLight(Mat imge, Mat pattern, int method);
Mat calculateLightPattern(Mat img);
static Scalar randomColor(RNG& rng);
void ConnectedComponents(Mat img);
void ConnectedComponetsStats(Mat img);
void FindContoursBasic(Mat img);
void main()
{
Mat img_noise;
medianBlur(img,img_noise,3);
Mat pattern = calculateLightPattern(img_noise);
Mat re_light = removeLight(img_noise, pattern, 1);
Mat img_thr;
threshold(re_light,img_thr,30,255,THRESH_BINARY);
//ConnectedComponents(img_thr);
ConnectedComponetsStats(img_thr);
//FindContoursBasic(img_thr);
waitKey(0);
}
Mat removeLight(Mat imge, Mat pattern, int method) {
Mat aux;
if (method == 1) {
Mat img32, pattern32;
imge.convertTo(img32, CV_32F);
pattern.convertTo(pattern32, CV_32F);
aux = 1 - (img32 / pattern32);
aux = aux * 255;
aux.convertTo(aux, CV_8U);
}
else {
aux = pattern - imge;
}
return aux;
}
Mat calculateLightPattern(Mat img) {
Mat pattern;
blur(img, pattern, Size(img.cols / 3, img.cols / 3));
return pattern;
}
static Scalar randomColor(RNG& rng)
{
int icolor = (unsigned)rng;
return Scalar(icolor & 255, (icolor >> 8) & 255, (icolor >> 16) & 255);
}
void ConnectedComponents(Mat img) {
Mat lables;
int num_objects = connectedComponents(img, lables);
if (num_objects < 2) {
cout << "未检测到目标" << endl;
return;
}
else {
cout << "检测到的目标数量: " << num_objects - 1 << endl;
}
Mat output = Mat::zeros(img.rows,img.cols,CV_8UC3);
RNG rng(0xFFFFFFFF);
for (int i = 1; i < num_objects;i++) {
Mat mask = lables == i;
output.setTo(randomColor(rng),mask);
}
imshow("Result",output);
}
void ConnectedComponetsStats(Mat img) {
Mat labels, stats, centroids;
int num_objects = connectedComponentsWithStats(img,labels,stats,centroids);
if (num_objects<2) {
cout << "未检测到目标" << endl;
return;
}
else {
cout << "检测到的目标数量: " << num_objects - 1 << endl;
}
Mat output = Mat::zeros(img.rows, img.cols, CV_8UC3);
RNG rng(0xFFFFFFFF);
for (int i = 1; i < num_objects; i++) {
Mat mask = labels == i;
output.setTo(randomColor(rng), mask);
stringstream ss;
ss << "area: " << stats.at<int>(i,CC_STAT_AREA);
putText(output,ss.str(), centroids.at<Point2d>(i),FONT_HERSHEY_SIMPLEX,0.4,Scalar(255,255,255));
}
imshow("Result", output);
}
void FindContoursBasic(Mat img) {
vector<vector<Point>> contours;
findContours(img, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
Mat output = Mat::zeros(img.rows, img.cols, CV_8UC3);
if (contours.size()==0) {
cout << "未检测到对象" << endl;
return;
}else{
cout << "检测到对象数量: " << contours.size() << endl;
}
RNG rng(0xFFFFFFFF);
for (int i = 0; i < contours.size(); i++)
drawContours(output,contours,i,randomColor(rng));
imshow("Result", output);
}
补充知识:SURF特征点检测与匹配之误匹配点删除
SURF特征点检测与匹配之误匹配点删除
SURF(SpeededUp Robust Feature)是加速版的具有鲁棒性的算法,是SIFT算法的加速版。
但是SURF特征匹配之后有大量的误匹配点,需要对这些误匹配点进行删除。
这里不从理论上讲解SURF原理等,直接说用法。
特征匹配的步骤分为三步:
1、找出特征点
2、描述特征点
3、特征点匹配
具体基本代码见最后。具体的可以看毛星云的书籍,但是个人认为其编程风格不严谨,自己有做改动。
但是匹配出来的结果如下:
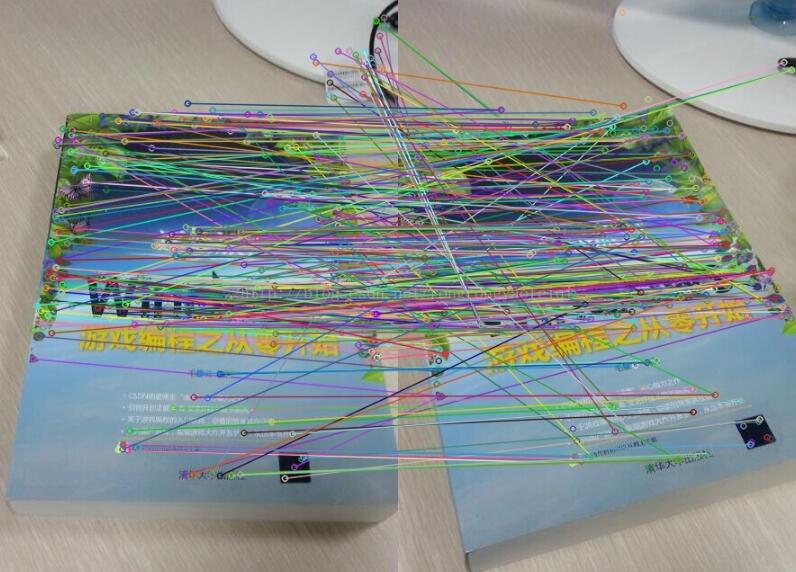
有很多的误匹配点,如何对误匹配点进行删除呢。
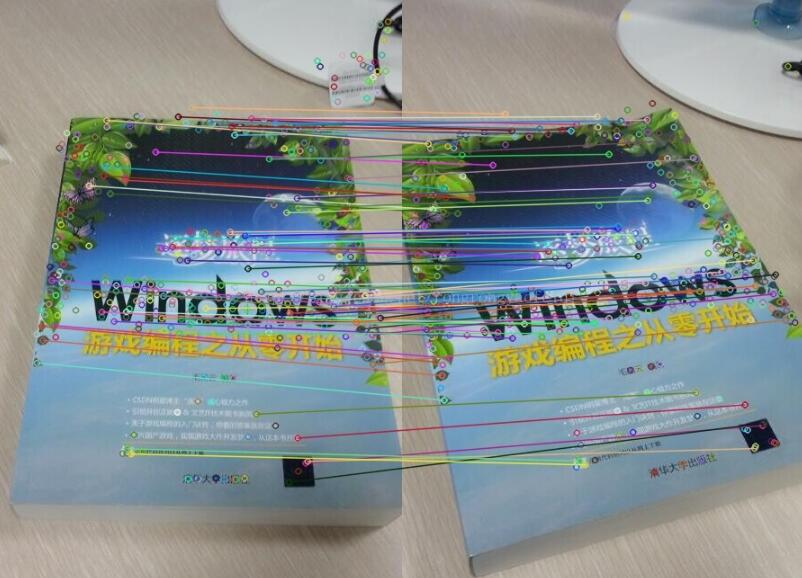
双向匹配加距离约束。
实验结果如下:效果还是非常好的。
#include "stdafx.h"
#include <opencv2\opencv.hpp>
#include <opencv2\nonfree\nonfree.hpp>
#include <opencv2\legacy\legacy.hpp>
#include <iostream>
int _tmain(int argc, _TCHAR* argv[])
{
//读取图片
cv::Mat srcImg1 = cv::imread("1.jpg", 1);
cv::Mat srcImg2 = cv::imread("2.jpg", 1);
if (srcImg1.empty() || srcImg2.empty())
{
std::cout << "Read Image ERROR!" << std::endl;
return 0;
}
//SURF算子特征点检测
int minHessian = 700;
cv::SurfFeatureDetector detector(minHessian);//定义特征点类对象
std::vector<cv::KeyPoint> keyPoint1, keyPoint2;//存放动态数组,也就是特征点
detector.detect(srcImg1, keyPoint1);
detector.detect(srcImg2, keyPoint2);
//特征向量
cv::SurfDescriptorExtractor extrator;//定义描述类对象
cv::Mat descriptor1, descriptor2;//描述对象
extrator.compute(srcImg1, keyPoint1, descriptor1);
extrator.compute(srcImg2, keyPoint2, descriptor2);
//BruteForce暴力匹配
cv::BruteForceMatcher <cv::L2<float>>matcher;//匹配器
std::vector <cv::DMatch> matches;
matcher12.match(descriptor1, descriptor2, matches);
//绘制关键点
cv::Mat imgMatch;
cv::drawMatches(srcImg1, keyPoint1, srcImg2, keyPoint2, matches, imgMatch);
cv::namedWindow("匹配图", CV_WINDOW_AUTOSIZE);
cv::imshow("匹配图", imgMatch);
cv::imwrite("匹配图.jpg", imgMatch);
cv::waitKey(10);
return 0;
}
以上这篇浅谈opencv自动光学检测、目标分割和检测(连通区域和findContours)就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持易盾网络。