本文参考github上SSD实现,对模型进行分析,主要分析模型组成及输入输出大小.SSD网络结构如下图: 每输入的图像有8732个框输出; import torchimport torch.nn as nnimport torch.nn.functional as Ffrom torch.a
本文参考github上SSD实现,对模型进行分析,主要分析模型组成及输入输出大小.SSD网络结构如下图:
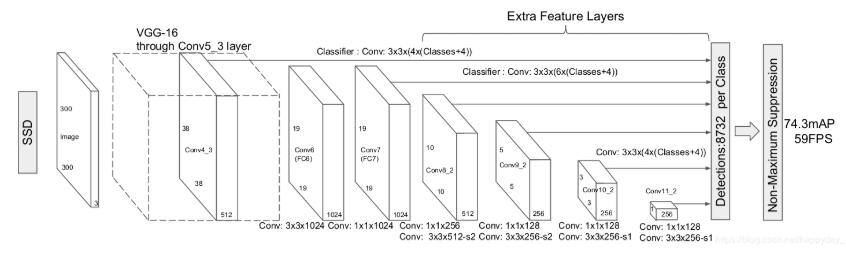
每输入的图像有8732个框输出;
import torch import torch.nn as nn import torch.nn.functional as F from torch.autograd import Variable #from layers import * from data import voc, coco import os
base = {
'300': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 'C', 512, 512, 512, 'M',
512, 512, 512],
'512': [],
}
extras = {
'300': [256, 'S', 512, 128, 'S', 256, 128, 256, 128, 256],
'512': [],
}
mbox = {
'300': [4, 6, 6, 6, 4, 4], # number of boxes per feature map location
'512': [],
}
VGG基础网络结构:
def vgg(cfg, i, batch_norm=False):
layers = []
in_channels = i
for v in cfg:
if v == 'M':
layers += [nn.MaxPool2d(kernel_size=2, stride=2)]
elif v == 'C':
layers += [nn.MaxPool2d(kernel_size=2, stride=2, ceil_mode=True)]
else:
conv2d = nn.Conv2d(in_channels, v, kernel_size=3, padding=1)
if batch_norm:
layers += [conv2d, nn.BatchNorm2d(v), nn.ReLU(inplace=True)]
else:
layers += [conv2d, nn.ReLU(inplace=True)]
in_channels = v
pool5 = nn.MaxPool2d(kernel_size=3, stride=1, padding=1)
conv6 = nn.Conv2d(512, 1024, kernel_size=3, padding=6, dilation=6)
conv7 = nn.Conv2d(1024, 1024, kernel_size=1)
layers += [pool5, conv6,
nn.ReLU(inplace=True), conv7, nn.ReLU(inplace=True)]
return layers
size=300 vgg=vgg(base[str(size)], 3) print(vgg)
输出为:
Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ReLU(inplace) Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ReLU(inplace) MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False) Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ReLU(inplace) Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ReLU(inplace) MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False) Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ReLU(inplace) Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ReLU(inplace) Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ReLU(inplace) MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=True) Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ReLU(inplace) Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ReLU(inplace) Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ReLU(inplace) MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False) Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ReLU(inplace) Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ReLU(inplace) Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ReLU(inplace) MaxPool2d(kernel_size=3, stride=1, padding=1, dilation=1, ceil_mode=False) Conv2d(512, 1024, kernel_size=(3, 3), stride=(1, 1), padding=(6, 6), dilation=(6, 6)) ReLU(inplace) Conv2d(1024, 1024, kernel_size=(1, 1), stride=(1, 1)) ReLU(inplace)
SSD中添加的网络
add_extras函数构建基本的卷积层
def add_extras(cfg, i, batch_norm=False):
# Extra layers added to VGG for feature scaling
layers = []
in_channels = i
flag = False
for k, v in enumerate(cfg):
if in_channels != 'S':
if v == 'S':
layers += [nn.Conv2d(in_channels, cfg[k + 1],
kernel_size=(1, 3)[flag], stride=2, padding=1)]
else:
layers += [nn.Conv2d(in_channels, v, kernel_size=(1, 3)[flag])]
flag = not flag
in_channels = v
return layers
extra_layers=add_extras(extras[str(size)], 1024) for layer in extra_layers: print(layer)
输出为:
Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1)) Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1)) Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1)) Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1)) Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1)) Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1)) Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1)) Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1))
multibox函数得到每个特征图的默认box的位置计算网络和分类得分网络
def multibox(vgg, extra_layers, cfg, num_classes):
loc_layers = []
conf_layers = []
vgg_source = [21, -2]
for k, v in enumerate(vgg_source):
loc_layers += [nn.Conv2d(vgg[v].out_channels,
cfg[k] * 4, kernel_size=3, padding=1)]
conf_layers += [nn.Conv2d(vgg[v].out_channels,
cfg[k] * num_classes, kernel_size=3, padding=1)]
for k, v in enumerate(extra_layers[1::2], 2):
loc_layers += [nn.Conv2d(v.out_channels, cfg[k]
* 4, kernel_size=3, padding=1)]
conf_layers += [nn.Conv2d(v.out_channels, cfg[k]
* num_classes, kernel_size=3, padding=1)]
return vgg, extra_layers, (loc_layers, conf_layers)
base_, extras_, head_ = multibox(vgg(base[str(size)], 3), ## 产生vgg19基本模型
add_extras(extras[str(size)], 1024),
mbox[str(size)], num_classes)
#mbox[str(size)]为:[4, 6, 6, 6, 4, 4]
得到的输出为:
base_为上述描述的vgg网络,extras_为extra_layers网络,head_为:
([Conv2d(512, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)), Conv2d(1024, 24, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)), Conv2d(512, 24, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)), Conv2d(256, 24, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)), Conv2d(256, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)), Conv2d(256, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))], [Conv2d(512, 84, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)), Conv2d(1024, 126, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)), Conv2d(512, 126, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)), Conv2d(256, 126, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)), Conv2d(256, 84, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)), Conv2d(256, 84, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))])
SSD网络及forward函数为:
class SSD(nn.Module):
"""Single Shot Multibox Architecture
The network is composed of a base VGG network followed by the
added multibox conv layers. Each multibox layer branches into
1) conv2d for class conf scores
2) conv2d for localization predictions
3) associated priorbox layer to produce default bounding
boxes specific to the layer's feature map size.
See: https://arxiv.org/pdf/1512.02325.pdf for more details.
Args:
phase: (string) Can be "test" or "train"
size: input image size
base: VGG16 layers for input, size of either 300 or 500
extras: extra layers that feed to multibox loc and conf layers
head: "multibox head" consists of loc and conf conv layers
"""
def __init__(self, phase, size, base, extras, head, num_classes):
super(SSD, self).__init__()
self.phase = phase
self.num_classes = num_classes
self.cfg = (coco, voc)[num_classes == 21]
self.priorbox = PriorBox(self.cfg)
self.priors = Variable(self.priorbox.forward(), volatile=True)
self.size = size
# SSD network
self.vgg = nn.ModuleList(base)
# Layer learns to scale the l2 normalized features from conv4_3
self.L2Norm = L2Norm(512, 20)
self.extras = nn.ModuleList(extras)
self.loc = nn.ModuleList(head[0])
self.conf = nn.ModuleList(head[1])
if phase == 'test':
self.softmax = nn.Softmax(dim=-1)
self.detect = Detect(num_classes, 0, 200, 0.01, 0.45)
def forward(self, x):
"""Applies network layers and ops on input image(s) x.
Args:
x: input image or batch of images. Shape: [batch,3,300,300].
Return:
Depending on phase:
test:
Variable(tensor) of output class label predictions,
confidence score, and corresponding location predictions for
each object detected. Shape: [batch,topk,7]
train:
list of concat outputs from:
1: confidence layers, Shape: [batch*num_priors,num_classes]
2: localization layers, Shape: [batch,num_priors*4]
3: priorbox layers, Shape: [2,num_priors*4]
"""
sources = list()
loc = list()
conf = list()
# apply vgg up to conv4_3 relu
for k in range(23):
x = self.vgg[k](x) ##得到的x尺度为[1,512,38,38]
s = self.L2Norm(x)
sources.append(s)
# apply vgg up to fc7
for k in range(23, len(self.vgg)):
x = self.vgg[k](x) ##得到的x尺寸为[1,1024,19,19]
sources.append(x)
# apply extra layers and cache source layer outputs
for k, v in enumerate(self.extras):
x = F.relu(v(x), inplace=True)
if k % 2 == 1:
sources.append(x)
'''
上述得到的x输出分别为:
torch.Size([1, 512, 10, 10])
torch.Size([1, 256, 5, 5])
torch.Size([1, 256, 3, 3])
torch.Size([1, 256, 1, 1])
'''
# apply multibox head to source layers
for (x, l, c) in zip(sources, self.loc, self.conf):
loc.append(l(x).permute(0, 2, 3, 1).contiguous())
conf.append(c(x).permute(0, 2, 3, 1).contiguous())
loc = torch.cat([o.view(o.size(0), -1) for o in loc], 1)
conf = torch.cat([o.view(o.size(0), -1) for o in conf], 1)
if self.phase == "test":
output = self.detect(
loc.view(loc.size(0), -1, 4), # loc preds
self.softmax(conf.view(conf.size(0), -1,
self.num_classes)), # conf preds
self.priors.type(type(x.data)) # default boxes
)
else:
output = (
loc.view(loc.size(0), -1, 4), #[1,8732,4]
conf.view(conf.size(0), -1, self.num_classes),#[1,8732,21]
self.priors
)
return output
上述代码中sources中保存的数据输出如下,即用于边框提取的特征图:
torch.Size([1, 512, 38, 38]) torch.Size([1, 1024, 19, 19]) torch.Size([1, 512, 10, 10]) torch.Size([1, 256, 5, 5]) torch.Size([1, 256, 3, 3]) torch.Size([1, 256, 1, 1])
模型输入为
x=Variable(torch.randn(1,3,300,300))
以上这篇基于Pytorch SSD模型分析就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持易盾网络。