keras模型可视化: model:model = Sequential()# input: 100x100 images with 3 channels - (100, 100, 3) tensors.# this applies 32 convolution filters of size 3x3 each.model.add(ZeroPadding2D((1,1), input_shape=(38, 38, 1)))model.add(Conv2
keras模型可视化:
model: model = Sequential() # input: 100x100 images with 3 channels -> (100, 100, 3) tensors. # this applies 32 convolution filters of size 3x3 each. model.add(ZeroPadding2D((1,1), input_shape=(38, 38, 1))) model.add(Conv2D(32, (3, 3), activation='relu', padding='same')) # model.add(Conv2D(32, (3, 3), activation='relu', padding='same')) model.add(BatchNormalization()) model.add(MaxPooling2D(pool_size=(2, 2))) model.add(Dropout(0.25)) model.add(Conv2D(64, (3, 3), activation='relu', padding='same',)) # model.add(Conv2D(64, (3, 3), activation='relu', padding='same',)) model.add(BatchNormalization()) model.add(MaxPooling2D(pool_size=(2, 2))) model.add(Dropout(0.25)) model.add(Conv2D(128, (3, 3), activation='relu', padding='same',)) # model.add(Conv2D(128, (3, 3), activation='relu', padding='same',)) model.add(BatchNormalization()) model.add(MaxPooling2D(pool_size=(2, 2))) model.add(Dropout(0.25)) model.add(AveragePooling2D((5,5))) model.add(Flatten()) # model.add(Dense(512, activation='relu')) # model.add(Dropout(0.5)) model.add(Dense(label_size, activation='softmax'))
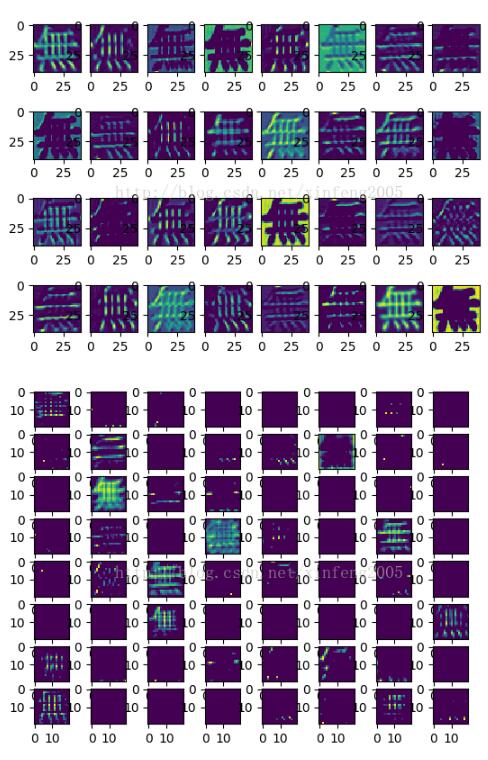
1.层可视化:
test_x = [] img_src = cv2.imdecode(np.fromfile(r'c:\temp.tif', dtype=np.uint8), cv2.IMREAD_GRAYSCALE) img = cv2.resize(img_src, (38, 38), interpolation=cv2.INTER_CUBIC) # img = np.random.randint(0,255,(38,38)) img = (255 - img) / 255 img = np.reshape(img, (38, 38, 1)) test_x.append(img) ################################################################### layer = model.layers[1] weight = layer.get_weights() # print(weight) print(np.asarray(weight).shape) model_v1 = Sequential() # input: 100x100 images with 3 channels -> (100, 100, 3) tensors. # this applies 32 convolution filters of size 3x3 each. model_v1.add(ZeroPadding2D((1, 1), input_shape=(38, 38, 1))) model_v1.add(Conv2D(32, (3, 3), activation='relu', padding='same')) # model.add(Conv2D(32, (3, 3), activation='relu', padding='same')) model_v1.layers[1].set_weights(weight) re = model_v1.predict(np.array(test_x)) print(np.shape(re)) re = np.transpose(re, (0,3,1,2)) for i in range(32): plt.subplot(4,8,i+1) plt.imshow(re[0][i]) #, cmap='gray' plt.show() ################################################################## model_v2 = Sequential() # input: 100x100 images with 3 channels -> (100, 100, 3) tensors. # this applies 32 convolution filters of size 3x3 each. model_v2.add(ZeroPadding2D((1, 1), input_shape=(38, 38, 1))) model_v2.add(Conv2D(32, (3, 3), activation='relu', padding='same')) # model.add(Conv2D(32, (3, 3), activation='relu', padding='same')) model_v2.add(BatchNormalization()) model_v2.add(MaxPooling2D(pool_size=(2, 2))) model_v2.add(Dropout(0.25)) model_v2.add(Conv2D(64, (3, 3), activation='relu', padding='same', )) print(len(model_v2.layers)) layer1 = model.layers[1] weight1 = layer1.get_weights() model_v2.layers[1].set_weights(weight1) layer5 = model.layers[5] weight5 = layer5.get_weights() model_v2.layers[5].set_weights(weight5) re2 = model_v2.predict(np.array(test_x)) re2 = np.transpose(re2, (0,3,1,2)) for i in range(64): plt.subplot(8,8,i+1) plt.imshow(re2[0][i]) #, cmap='gray' plt.show() ################################################################## model_v3 = Sequential() # input: 100x100 images with 3 channels -> (100, 100, 3) tensors. # this applies 32 convolution filters of size 3x3 each. model_v3.add(ZeroPadding2D((1, 1), input_shape=(38, 38, 1))) model_v3.add(Conv2D(32, (3, 3), activation='relu', padding='same')) # model.add(Conv2D(32, (3, 3), activation='relu', padding='same')) model_v3.add(BatchNormalization()) model_v3.add(MaxPooling2D(pool_size=(2, 2))) model_v3.add(Dropout(0.25)) model_v3.add(Conv2D(64, (3, 3), activation='relu', padding='same', )) # model.add(Conv2D(64, (3, 3), activation='relu', padding='same',)) model_v3.add(BatchNormalization()) model_v3.add(MaxPooling2D(pool_size=(2, 2))) model_v3.add(Dropout(0.25)) model_v3.add(Conv2D(128, (3, 3), activation='relu', padding='same', )) print(len(model_v3.layers)) layer1 = model.layers[1] weight1 = layer1.get_weights() model_v3.layers[1].set_weights(weight1) layer5 = model.layers[5] weight5 = layer5.get_weights() model_v3.layers[5].set_weights(weight5) layer9 = model.layers[9] weight9 = layer9.get_weights() model_v3.layers[9].set_weights(weight9) re3 = model_v3.predict(np.array(test_x)) re3 = np.transpose(re3, (0,3,1,2)) for i in range(121): plt.subplot(11,11,i+1) plt.imshow(re3[0][i]) #, cmap='gray' plt.show()
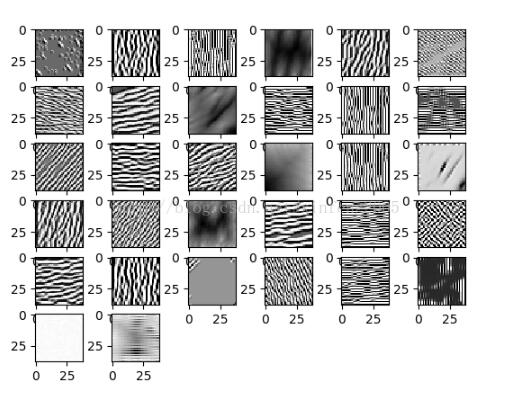
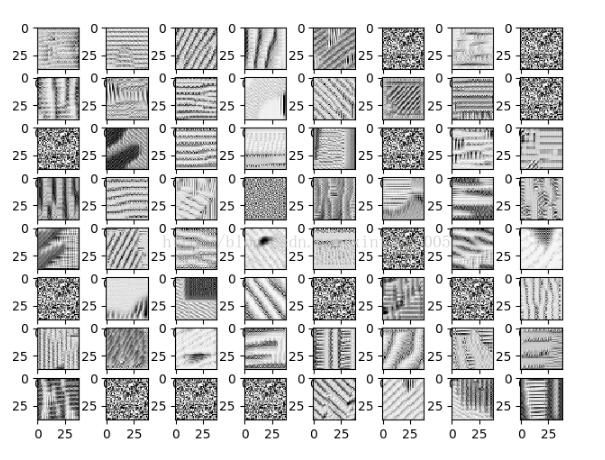
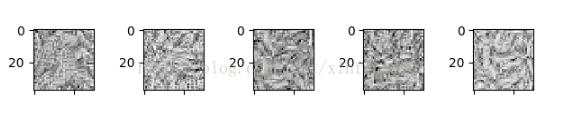
2.kernel可视化:
def process(x):
res = np.clip(x, 0, 1)
return res
def dprocessed(x):
res = np.zeros_like(x)
res += 1
res[x < 0] = 0
res[x > 1] = 0
return res
def deprocess_image(x):
x -= x.mean()
x /= (x.std() + 1e-5)
x *= 0.1
x += 0.5
x = np.clip(x, 0, 1)
x *= 255
x = np.clip(x, 0, 255).astype('uint8')
return x
for i_kernal in range(64):
input_img=model.input
loss = K.mean(model.layers[5].output[:, :,:,i_kernal])
# loss = K.mean(model.output[:, i_kernal])
# compute the gradient of the input picture wrt this loss
grads = K.gradients(loss, input_img)[0]
# normalization trick: we normalize the gradient
grads /= (K.sqrt(K.mean(K.square(grads))) + 1e-5)
# this function returns the loss and grads given the input picture
iterate = K.function([input_img, K.learning_phase()], [loss, grads])
# we start from a gray image with some noise
np.random.seed(0)
num_channels=1
img_height=img_width=38
input_img_data = (255- np.random.randint(0,255,(1, img_height, img_width, num_channels))) / 255.
failed = False
# run gradient ascent
print('####################################',i_kernal+1)
loss_value_pre=0
for i in range(10000):
# processed = process(input_img_data)
# predictions = model.predict(input_img_data)
loss_value, grads_value = iterate([input_img_data,1])
# grads_value *= dprocessed(input_img_data[0])
if i%1000 == 0:
# print(' predictions: ' , np.shape(predictions), np.argmax(predictions))
print('Iteration %d/%d, loss: %f' % (i, 10000, loss_value))
print('Mean grad: %f' % np.mean(grads_value))
if all(np.abs(grads_val) < 0.000001 for grads_val in grads_value.flatten()):
failed = True
print('Failed')
break
# print('Image:\n%s' % str(input_img_data[0,0,:,:]))
if loss_value_pre != 0 and loss_value_pre > loss_value:
break
if loss_value_pre == 0:
loss_value_pre = loss_value
# if loss_value > 0.99:
# break
input_img_data += grads_value * 1 #e-3
plt.subplot(8, 8, i_kernal+1)
# plt.imshow((process(input_img_data[0,:,:,0])*255).astype('uint8'), cmap='Greys') #cmap='Greys'
img_re = deprocess_image(input_img_data[0])
img_re = np.reshape(img_re, (38,38))
plt.imshow(img_re, cmap='Greys') #cmap='Greys'
# plt.show()
plt.show()
model.layers[1]
model.layers[5]
model.layers[-1]
以上这篇keras模型可视化,层可视化及kernel可视化实例就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持易盾网络。