介绍 本博文中的代码,实现的是加载训练好的模型model_halcon_resenet.h5,并把该模型的参数赋值给两个不同的新的model。 函数式模型 官网上给出的调用一个训练好模型,并输出任意层的
介绍
本博文中的代码,实现的是加载训练好的模型model_halcon_resenet.h5,并把该模型的参数赋值给两个不同的新的model。
函数式模型
官网上给出的调用一个训练好模型,并输出任意层的feature。
model = Model(inputs=base_model.input, outputs=base_model.get_layer(‘block4_pool').output)
但是这有一个问题,就是新的model,如果输入inputs和训练好的model的inputs大小不同呢?比如我想建立一个输入是600x600x3的新model,但是训练好的model输入是200x200x3,而这时我又想调用训练好模型的卷积核参数,这时该怎么办呢?
其实想一下,用训练好的模型参数,即使输入的尺寸不同,但是这些模型参数仍然可以处理计算,只是输出的feature map大小不同。那到底怎么赋值呢?其实很简单
在定义新的model时,新的model层在定义时,需要加上名字,而这个名字就是训练好的模型的每层名字。如下代码所示:
inputs=Input(shape=(400,500,3)) X=Conv2D(32, (3, 3),name=“conv2d_1”)(inputs) X=BatchNormalization(name=“batch_normalization_1”)(X) X=Activation(‘relu',name=“activation_1”)(X)
最后通过以下代码即可建立一个新的模型并拥有训练好模型的参数:
model=Model(inputs=inputs, outputs=X)
model.load_weights(‘model_halcon_resenet.h5', by_name=True)
源代码
from keras.models import load_model
from keras.preprocessing import image
from keras.applications.vgg19 import preprocess_input
from keras.models import Model
import numpy as np
from keras.layers import Conv2D, MaxPooling2D,merge
from keras.layers import BatchNormalization,Activation
from keras.layers import Input, Dense
from PIL import Image
import numpy as np
import keras
from keras.models import Sequential
from keras.layers import Dense, Dropout, Flatten,Input
from keras.layers import Conv2D, MaxPooling2D,merge,AveragePooling2D,GlobalAveragePooling2D
from keras.layers import BatchNormalization,Activation
from sklearn.model_selection import train_test_split
from keras.applications.densenet import DenseNet169, DenseNet121
from keras.applications.inception_resnet_v2 import InceptionResNetV2
from keras.applications.inception_v3 import InceptionV3
from keras.optimizers import SGD
from keras import regularizers
from keras.models import Model
import tensorflow as tf
from PIL import Image
from keras.callbacks import TensorBoard
import os
import cv2
from keras import backend as K
from model import focal_loss
import keras.losses
#ReadMe 该代码是参考fast rcnn系列,先对整幅图像提取特征feature map,然后从原图对应位置上映射到feature map,并对feature map进行
# 切片,从而提取对应某个位置上的特征,并把该特征送进后面的识别网络进行分类识别。
keras.losses.focal_loss = focal_loss#这句代码是为了引入定义的loss
base_model=load_model('model_halcon_resenet.h5')
base_model.summary()
inputs=Input(shape=(400,500,3))
X=Conv2D(32, (3, 3),name="conv2d_1")(inputs)
X=BatchNormalization(name="batch_normalization_1")(X)
X=Activation('relu',name="activation_1")(X)
#第一个残差模块
X_1=Conv2D(32, (3, 3),padding='same',name="conv2d_2")(X)
X_1=BatchNormalization(name="batch_normalization_2")(X_1)
X_1= Activation('relu',name="activation_2")(X_1)
X_1 = Conv2D(32, (3, 3),padding='same',name="conv2d_3")(X_1)
X_1 = BatchNormalization(name="batch_normalization_3")(X_1)
merge_data = merge([X_1, X], mode='sum',name="merge_1")
X = Activation('relu',name="activation_3")(merge_data)
#第一个残差模块结束
X=MaxPooling2D(pool_size=(2, 2),strides=(2,2),name="max_pooling2d_1")(X)
X=Conv2D(64, (3, 3),kernel_regularizer=regularizers.l2(0.01),name="conv2d_4")(X)
X=BatchNormalization(name="batch_normalization_4")(X)
X=Activation('relu',name="activation_4")(X)
#第二个残差模块
X_2=Conv2D(64, (3, 3),padding='same',name="conv2d_5")(X)
X_2=BatchNormalization(name="batch_normalization_5")(X_2)
X_2= Activation('relu',name="activation_5")(X_2)
X_2 = Conv2D(64, (3, 3),padding='same',name="conv2d_6")(X_2)
X_2 = BatchNormalization(name="batch_normalization_6")(X_2)
merge_data = merge([X_2, X], mode='sum',name="merge_2")
X = Activation('relu',name="activation_6")(merge_data)
#第二个残差模块结束
X = MaxPooling2D(pool_size=(2, 2), strides=(2, 2),name="max_pooling2d_2")(X)
X=Conv2D(64, (3, 3),name="conv2d_7")(X)
X=BatchNormalization(name="batch_normalization_7")(X)
X=Activation('relu',name="activation_7")(X)
X=MaxPooling2D(pool_size=(2, 2),strides=(2,2),name="max_pooling2d_3")(X)
#第三个残差模块开始
X_3=Conv2D(64, (3, 3),padding='same',name="conv2d_8")(X)
X_3=BatchNormalization(name="batch_normalization_8")(X_3)
X_3= Activation('relu',name="activation_8")(X_3)
X_3 = Conv2D(64, (3, 3),padding='same',name="conv2d_9")(X_3)
X_3 = BatchNormalization(name="batch_normalization_9")(X_3)
merge_data = merge([X_3, X], mode='sum',name="merge_3")
X = Activation('relu',name="activation_9")(merge_data)
#第三个残差模块结束
X=Conv2D(32, (3, 3),kernel_regularizer=regularizers.l2(0.01),name="conv2d_10")(X)
X=BatchNormalization(name="batch_normalization_10")(X)
X=Activation('relu',name="activation_10")(X)
#第四个残差模块开始
X_4=Conv2D(32, (3, 3),padding='same',name="conv2d_11")(X)
X_4=BatchNormalization(name="batch_normalization_11")(X_4)
X_4= Activation('relu',name="activation_11")(X_4)
X_4 = Conv2D(32, (3, 3),padding='same',name="conv2d_12")(X_4)
X_4 = BatchNormalization(name="batch_normalization_12")(X_4)
merge_data = merge([X_4, X], mode='sum',name="merge_4")
X = Activation('relu',name="activation_12")(merge_data)
#第四个残差模块结束
X = MaxPooling2D(pool_size=(2, 2), strides=(2, 2),name="max_pooling2d_4")(X)
X = Conv2D(64, (3, 3),name="conv2d_13")(X)
X = BatchNormalization(name="batch_normalization_13")(X)
X = Activation('relu',name="activation_13")(X)
#第五个残差模块开始
X_5=Conv2D(64, (3, 3),padding='same',name="conv2d_14")(X)
X_5=BatchNormalization(name="batch_normalization_14")(X_5)
X_5= Activation('relu',name="activation_14")(X_5)
X_5 = Conv2D(64, (3, 3),padding='same',name="conv2d_15")(X_5)
X_5 = BatchNormalization(name="batch_normalization_15")(X_5)
merge_data = merge([X_5, X], mode='sum',name="merge_5")
X = Activation('relu',name="activation_15")(merge_data)
#第五个残差模块结束
model=Model(inputs=inputs, outputs=X)
model.load_weights('model_halcon_resenet.h5', by_name=True)
#读取指定图像数据
image_dir='C:/Users/18301/Desktop/blister/new/blister_mixed_11.png'
img = image.load_img(image_dir, target_size=(400, 500))
x = image.img_to_array(img)
x = np.expand_dims(x, axis=0)
x = preprocess_input(x)
#利用第一个模型预测出特征数据,并对特征数据进行切片
feature_map=model.predict(x)
T=np.array(feature_map)
f_1=T[:,16:21,0:10,:]
print(f_1.shape)
print(feature_map.shape)
#第一个模型没有问题
#定义第二个模型
inputs_sec=Input(shape=(1,5,10,64))
X_= Flatten(name="flatten_1")(inputs_sec)
X_ = Dense(256, activation='relu',name="dense_1")(X_)
X_ = Dropout(0.5,name="dropout_1")(X_)
predictions = Dense(6, activation='softmax',name="dense_2")(X_)
model_sec=Model(inputs=inputs_sec, outputs=predictions)
model_sec.load_weights('model_halcon_resenet.h5', by_name=True)
#第二个模型定义结束
model_sec.summary()
#开始对整幅图像进行切片,并记录坐标位置
pic=cv2.imread(image_dir)
cor_list=[]
name_list=['blank','green_blank','red_blank','yellow','yellow_balnk','yellow_blue']
font = cv2.FONT_HERSHEY_SIMPLEX
for i in range(3):
for j in range(5):
if(i==2):
cut_feature = T[:, 4 * j:4 * j + 5, 17:27, :]
data = np.expand_dims(cut_feature, axis=0)
result = model_sec.predict(data)
print(result)
result_data=result[0].tolist()
#如果置信度过低,则舍弃
# if(max(result_data)<=0.7):
# continue
index_num = result_data.index(max(result_data))
name=name_list[index_num]
cor_list = [i * 160 + 6, j * 80] # 每个切片数据,映射到原图上,检测框对应的左上角坐标
x=cor_list[0]
y=cor_list[1]
cv2.rectangle(pic, (160 * i + 6, 80 * j), ((i + 1) * 160 + 6, 80 * (j+ 1)), (0, 255, 0), 2)
cv2.putText(pic, name, (x + 40, y + 40), font, 0.5, (0, 0, 255), 1)
else:
cut_feature = T[:, 4 * j:4 * j + 5, 9 * i:9 * i + 10, :]
data = np.expand_dims(cut_feature, axis=0)
result = model_sec.predict(data)
print(result)
result_data = result[0].tolist()
#如果置信度过低,则舍弃
# if (max(result_data) <= 0.7):
# continue
index_num = result_data.index(max(result_data))
name = name_list[index_num]
cor_list = [i * 160 + 6, j * 80] # 每个切片数据,映射到原图上,检测框对应的左上角坐标
x = cor_list[0]
y = cor_list[1]
cv2.rectangle(pic, (160 * i + 6, 80 * j), ((i + 1) * 160 + 6, 80 * (j + 1)), (0, 255, 0), 2)
cv2.putText(pic, name, (x + 40, y + 40), font, 0.5, (0, 0, 255), 1)
cv2.imshow('pic',pic)
cv2.waitKey(0)
cv2.destroyAllWindows()
# data= np.expand_dims(f_1, axis=0)
# result=model_sec.predict(data)
# print(result)
#第二个模型可以完全预测,没有问题
补充知识:加载训练好的模型参数,但是权重一直变化
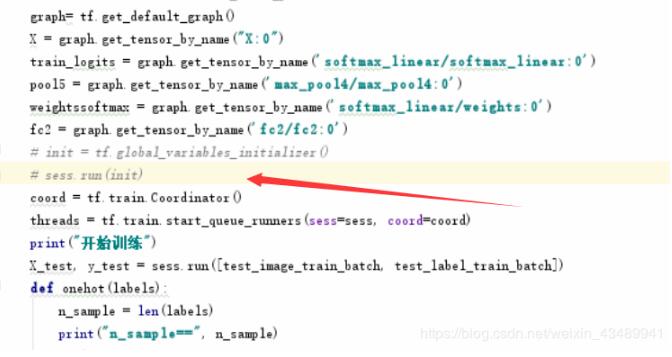
变量初始化会导致权重发生变化,去掉就好了。
以上这篇keras读取训练好的模型参数并把参数赋值给其它模型详解就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持易盾网络。