1.阈值化分割原理 通过对图像的灰度直方图进行数学统计,选择一个或多个阈值将像素划分为若干类。一般情况下,当图像由灰度值相差较大的目标和背景组成时,如果目标区域内部像
1.阈值化分割原理
通过对图像的灰度直方图进行数学统计,选择一个或多个阈值将像素划分为若干类。一般情况下,当图像由灰度值相差较大的目标和背景组成时,如果目标区域内部像素灰度分布均匀一致,背景区域像素在另一个灰度级上也分布均匀,这时图像的灰度直方图会呈现出双峰特性。
在这种情况下,选取位于这两个峰值中间的谷底对应的灰度值T作为灰度阈值,将图像中各个像素的灰度值与这个阈值进行比较,根据比较的结果将图像中的像素划分到两个类中。像素灰度值大于阈值T的像素点归为一类,其余像素点归为另一类。经阈值化处理后的图像g(x,y)定义为:
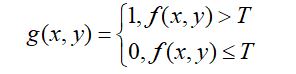
其中f(x,y)为原图像,T为灰度阈值,g(x,y)为分割后产生的二值图像。
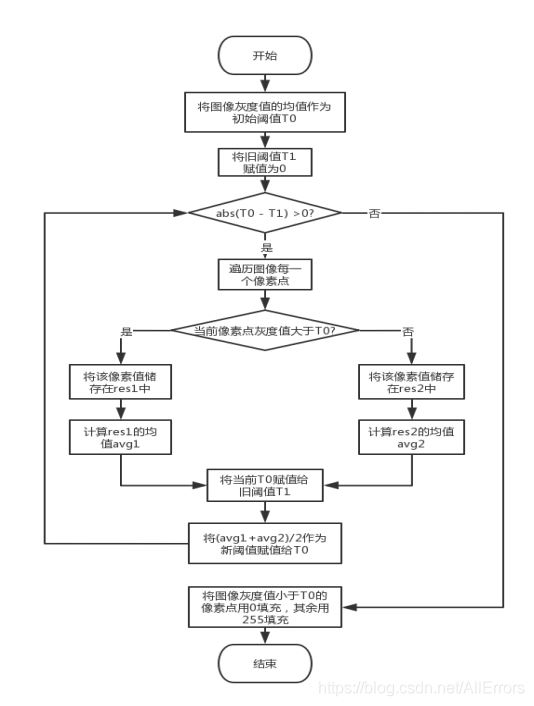
2.算法流程图
3.代码实现
from PIL import Image
import matplotlib.pyplot as plt
import numpy as np
#读入图片并转化为矩阵
img = plt.imread('2.jpg')
im = np.array(img)
# 矩阵大小
l = len(im)
w = len(im[0])
#求初始阈值
zmin = np.min(im)
zmax = np.max(im)
t0 = int((zmin+zmax)/2)
#初始化相关变量初始化
t1=0
res1=0
res2=0
s1=0
s2=0
#迭代法计算最佳阈值
while abs(t0-t1)>0:
for i in range(0,l-1):
for j in range(0,w-1):
if im[i,j]<t0:
res1=res1+im[i,j]
s1=s1+1
elif im[i,j]>t0:
res2=res2+im[i,j]
s2=s2+1
avg1=res1/s1
avg2=res2/s2
res1 = 0
res2 = 0
s1 = 0
s2 = 0
t1 = t0 #旧阈值储存在t1中
t0=int((avg1+avg2)/2) #计算新阈值
#阈值化分割
#像素点灰度值小于最佳阈值t0用0填充,其余用255填充
im = np.where(im[...,:] < t0, 0, 255)
#绘制原图窗口
plt.figure()
plt.imshow(img , cmap='gray')
plt.title('original')
#绘制原图直方图并显示最佳阈值
plt.figure()
plt.hist(img.ravel(),256)
plt.title('hist')
plt.axvline(t0) #绘制最佳阈值分割线
plt.text(25, 6100, "Best Threshold:{}".format(t0), size = 15, alpha = 0.8)
#绘制阈值化分割后图像
plt.figure()
plt.imshow(Image.fromarray(im) , cmap='gray')
plt.title('new')
#绘制阈值化分割后图像的直方图
plt.figure()
plt.hist(im.ravel(),256)
plt.title('hist')
plt.show()
4.阈值化分割结果
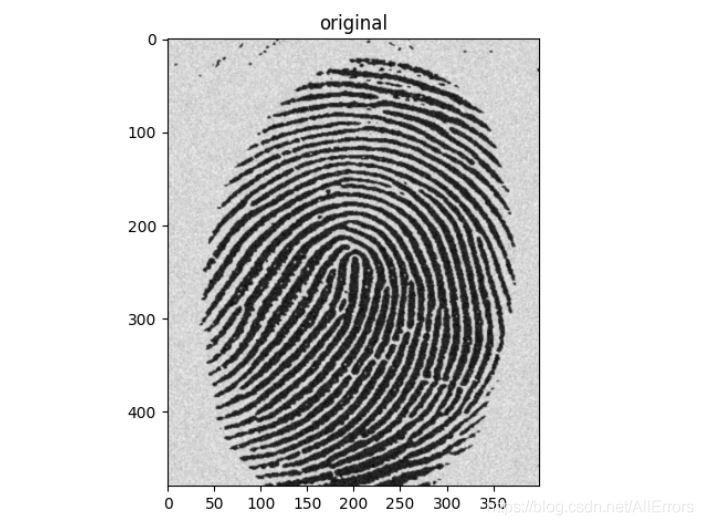
原始图像
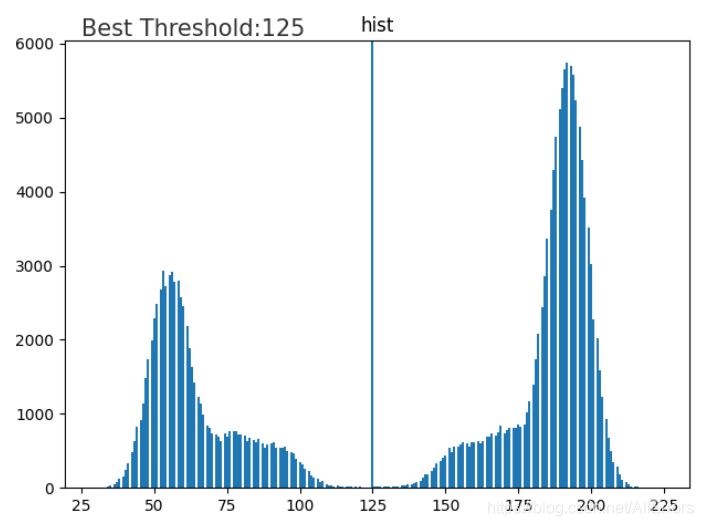
原始图像直方图
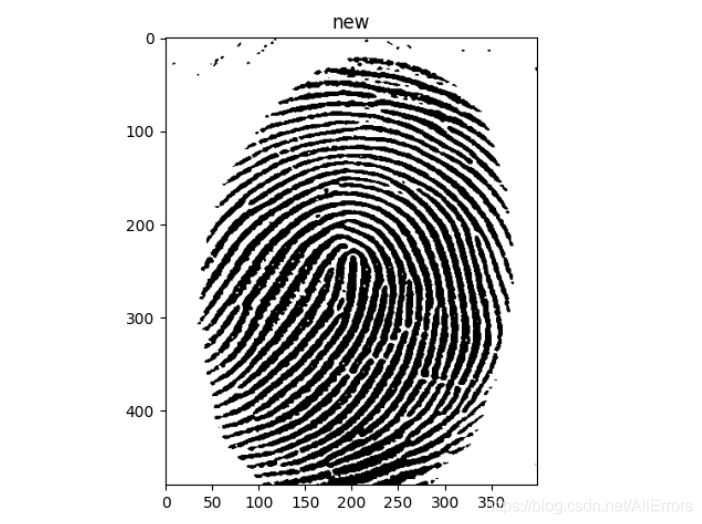
阈值化分割后图像
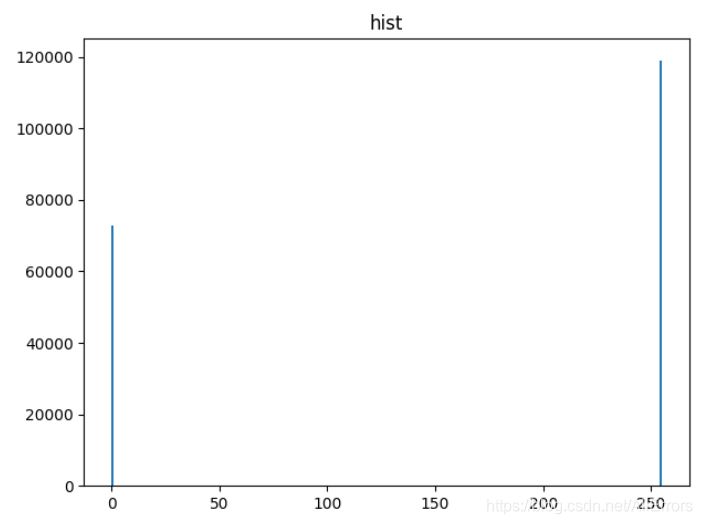
阈值化分割后图像直方图
到此这篇关于基于Python的图像阈值化分割(迭代法)的文章就介绍到这了,更多相关Python 图像阈值化分割内容请搜索易盾网络以前的文章或继续浏览下面的相关文章希望大家以后多多支持易盾网络!