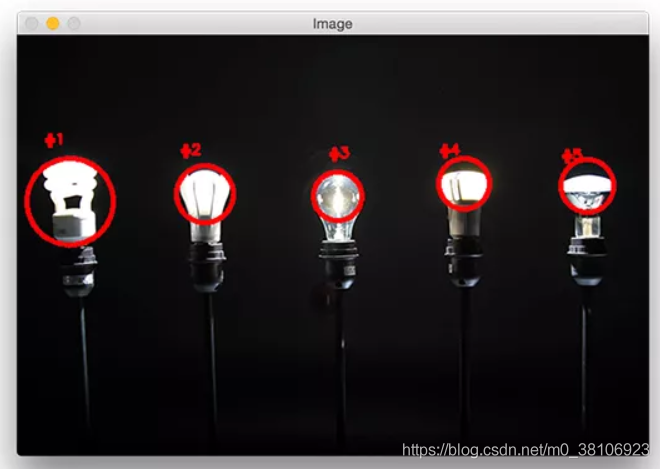
本篇博文分享一篇寻找图像中灯光亮点(图像中最亮点)的教程,例如,检测图像中五个灯光的亮点并标记,项目效果如下所示:


第1步:导入并打开原图像,实现代码如下所示:
# import the necessary packages
from imutils import contours
from skimage import measure
import numpy as np
import argparse
import imutils
import cv2
# construct the argument parse and parse the arguments
ap = argparse.ArgumentParser()
ap.add_argument("-i", "--image", required=True,
help="path to the image file")
args = vars(ap.parse_args())
第2步:开始检测图像中最亮的区域,首先需要从磁盘加载图像,然后将其转换为灰度图并进行平滑滤波,以减少高频噪声,实现代码如下所示:
#load the image, convert it to grayscale, and blur it image = cv2.imread(args["image"]) gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) blurred = cv2.GaussianBlur(gray, (11, 11), 0)
导入亮灯图像,过滤后效果如下所示:
第3步:阈值化处理,为了显示模糊图像中最亮的区域,将像素值p >= 200,设置为255(白色),像素值< 200,设置为0(黑色),实现代码如下所示:
# threshold the image to reveal light regions in the # blurred image thresh = cv2.threshold(blurred, 200, 255, cv2.THRESH_BINARY)[1]
效果如下所示:
第4步:此时可看到图像中存在噪声(小斑点),所以需要通过腐蚀和膨胀操作来清除,实现代码如下所示:
# perform a series of erosions and dilations to remove # any small blobs of noise from the thresholded image thresh = cv2.erode(thresh, None, iterations=2) thresh = cv2.dilate(thresh, None, iterations=4)
此时“干净”的图像如下所示:
第5步:本项目的关键步骤是对上图中的每个区域进行标记,即使在应用了腐蚀和膨胀后,仍然想要过滤掉剩余的小块儿区域。一个很好的方法是执行连接组件分析,实现代码如下所示:
# perform a connected component analysis on the thresholded # image, then initialize a mask to store only the "large" # components labels = measure.label(thresh, neighbors=8, background=0) mask = np.zeros(thresh.shape, dtype="uint8") # loop over the unique components for label in np.unique(labels): # if this is the background label, ignore it if label == 0: continue # otherwise, construct the label mask and count the # number of pixels labelMask = np.zeros(thresh.shape, dtype="uint8") labelMask[labels == label] = 255 numPixels = cv2.countNonZero(labelMask) # if the number of pixels in the component is sufficiently # large, then add it to our mask of "large blobs" if numPixels > 300: mask = cv2.add(mask, labelMask)
上述代码中,第4行使用scikit-image库执行实际的连接组件分析。measure.lable返回的label和阈值图像有相同的大小,唯一的区别就是label存储的为阈值图像每一斑点对应的正整数。
然后在第5行初始化一个掩膜来存储大的斑点。
第7行开始循环遍历每个label中的正整数标签,如果标签为零,则表示正在检测背景并可以安全的忽略它(9,10行)。否则,为当前区域构建一个掩码。
下面提供了一个GIF动画,它可视化地构建了每个标签的labelMask。使用这个动画来帮助你了解如何访问和显示每个单独的组件:
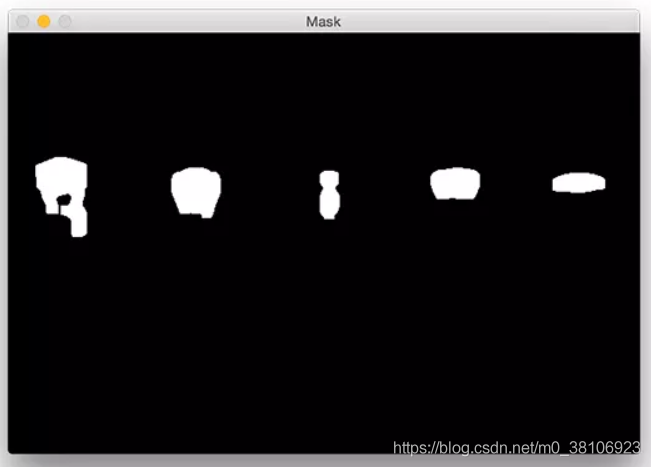
第15行对labelMask中的非零像素进行计数。如果numPixels超过了一个预先定义的阈值(在本例中,总数为300像素),那么认为这个斑点“足够大”,并将其添加到掩膜中。输出掩模如下图所示:
第6步:此时图像中所有小的斑点都被过滤掉了,只有大的斑点被保留了下来。最后一步是在的图像上绘制标记的斑点,实现代码如下所示:
# find the contours in the mask, then sort them from left to
# right
cnts = cv2.findContours(mask.copy(), cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)
cnts = imutils.grab_contours(cnts)
cnts = contours.sort_contours(cnts)[0]
# loop over the contours
for (i, c) in enumerate(cnts):
# draw the bright spot on the image
(x, y, w, h) = cv2.boundingRect(c)
((cX, cY), radius) = cv2.minEnclosingCircle(c)
cv2.circle(image, (int(cX), int(cY)), int(radius),
(0, 0, 255), 3)
cv2.putText(image, "#{}".format(i + 1), (x, y - 15),
cv2.FONT_HERSHEY_SIMPLEX, 0.45, (0, 0, 255), 2)
# show the output image
cv2.imshow("Image", image)
cv2.waitKey(0)
最后运行程序,可实现灯光亮点的检测和标记,每个灯泡都被独特地标上了圆圈,圆圈围绕着每个单独的明亮区域,效果如下所示:
本文来源于:Detecting multiple bright spots in an image with Python and OpenCV
到此这篇关于Python+OpenCV检测灯光亮点的实现方法的文章就介绍到这了,更多相关OpenCV 检测灯光亮点内容请搜索易盾网络以前的文章或继续浏览下面的相关文章希望大家以后多多支持易盾网络!