- 前言
- posix 标准接口层设计
- 模拟器的系统心跳
- 模拟器的task底层实质
- 模拟器的任务切换原理
- cortex M3/M4异常处理
- 双堆栈指针
- 双操作模式
- 栈帧
- EXC_RETURN
如果对硬件任务内核切换不感兴趣的同学可以跳过。
由于任务源码分析开始涉及到接口层,所以在学习源码前,先了解下posix接口层的设计。
本系列接口层会讲解两个:
- posix标准接口。因为本教程demo在linux上跑freertos时实际使用的就是这个接口。
- cortex m3/m4架构接口。因为这才是真正设计到ARM架构硬件的接口。且,这个网上资料较多,看不懂本作者的笔记也可以找度娘辅助分析。
强烈建议:
- 涉及到接口,建议找到对应的架构权威指南学习,掌握底层原理。
- 对于指向学习系统应用的同学,快速移植,直接在freertos原生代码中找到结构层进行替换即可。
参考:
- ARM开发官网:http://infocenter.arm.com/
- 《The Definitive Guide to Arm Cortex-M3 and Cortex-M4 Processors_c.pdf》
- 李柱明博客:https://www.cnblogs.com/lizhuming/p/16062486.html
模拟器不涉及到CPU寄存器组。
模拟器的系统心跳RTOS系统周期是使用ITIMER生成的,并且信号仅被传递给当前执行的pthread。
RTPS系统滴答信号处理器增加滴答计数,并选择下一个RTOS任务上下文。
它恢复该线程,并向自己发送一个信号来暂停。
挂起仅在系统滴答信号处理程序退出时进行处理,因为信号已排队。
模拟器的task底层实质FreeRTOS模拟器的实现是简单地包装平台本地线程,所有切换任务上下文的调用将调用OS挂起和恢复线程API。
这个模拟器使用Posix条件变量和Signals来控制底层Posix线程的执行。
信号可以异步地传递给线程,这样它们就会中断目标线程的执行,而挂起的线程则会等待条件变量恢复。
模拟器的任务切换原理当一个新的Task被创建时,一个pthread被创建为Task的执行上下文。
pthread立即挂起自己,并将执行返回给创建者。
当一个pthread挂起时,它正在pthread_cond_wait调用中等待,这个调用被阻塞,直到它收到一个恢复信号pthread_cond_signal。
任务可以通过协作调用taskYIELD()或RTOS系统Tick调度两种方式。
在这个模拟器中,通过恢复下一个任务上下文(由FreeRTOS Scheduler决定)和挂起当前上下文(两者之间进行简短的握手)来切换Task上下文。
cortex M3/M4异常处理参考:《The Definitive Guide to Arm Cortex-M3 and Cortex-M4 Processors_c.pdf》
读者可以翻看cortex m3/m4的权威指南查看更多细节即可,本教程只粗略说明下异常时栈帧的动态过程。
CPU寄存器组可自行百度。
双堆栈指针Cortex-M3内核有两个堆栈指针:
- MSP:主堆栈指针,是给系统栈空间使用的。
- PSP:进程堆栈指针,是给任务栈使用的。
在FreeRTOS任务中,所有栈空间的使用都是通过PSP指针进行指向的。
一旦进入了中断函数以及可能发生的中断嵌套都是用的MSP指针。
双操作模式Cortex-M3支持两种操作模式(handler模式和thread模式),这两种模式是为了区别正在执行代码的类型:
- handler模式为异常处理程序的代码。
- 线程模式为普通应用程序的代码。
异常后硬件压栈部分:
- 下图描述的是启用或需要双字栈对齐调整时,Cortex-M3或Cortex-M4处理器(不带浮点)的栈帧。
- 双字栈对齐这个特性是AAPCS规则的一个要求,意思是栈指针的数值在函数入口或出口处应该是双字对齐,若未对齐,异常硬件压栈时会自动插入一个字来保证双字对齐。(了解即可)
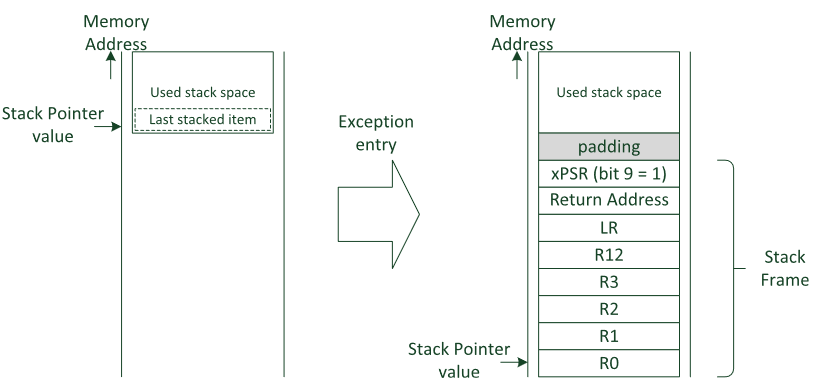
注意,异常时硬件压栈的LR值和函数调用时的函数栈帧中的LR值是不一样的,具体可以了解下EXC_RETURN。
EXC_RETURN进入异常服务程序以后,LR的值被自动更新为特殊的EXC_RETURN(只有[3:0]位有意义,其他位都为1)。如图说明:
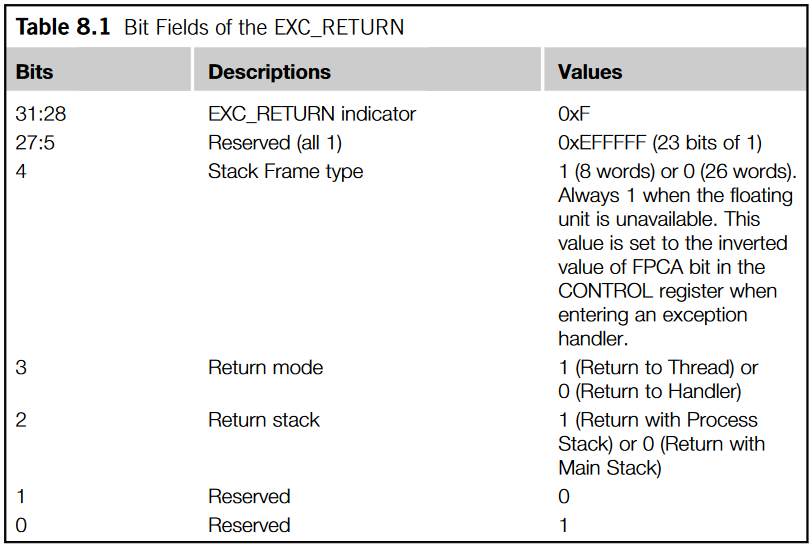
1:返回后进入线程模式 2 0:从主堆栈中执行出栈操作,返回后使用MSP
1:从进程栈中执行出栈操作,返回后使用PSP 1 保留,必须为0 0 0:返回ARM状态
1:返回Thumb状态(在CM3中必须为1)
有效值如下:
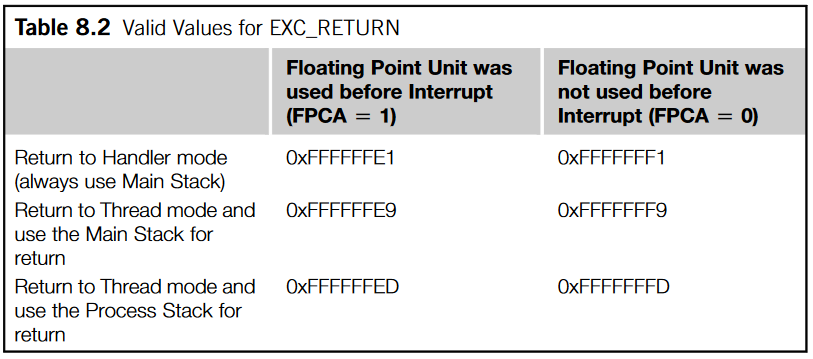
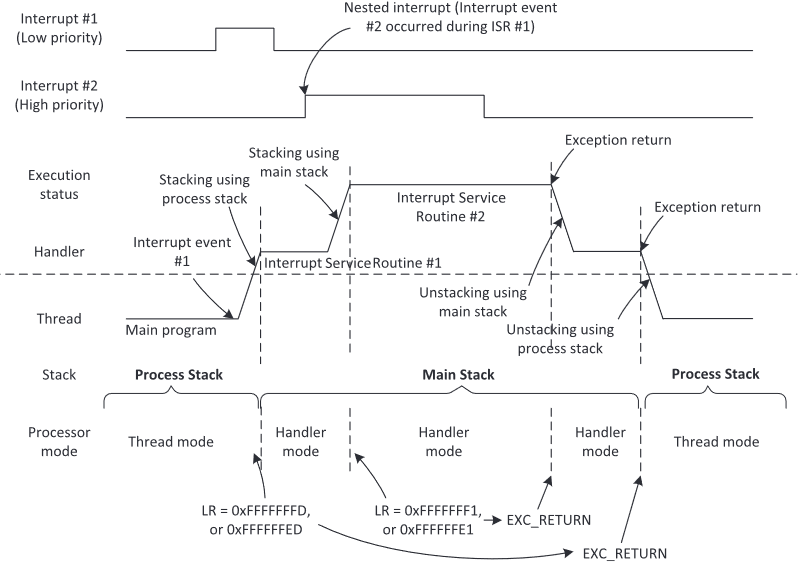
如主程序在线程模式下运行,并且在使用PSP时被中断,则在服务程序中LR=0xFFFFFFFD(主程序被打断前LR已被自动入栈)。
异常及异常嵌套时LR动态及栈指针使用过程:下图是线程模式使用进程栈为基础: