生产者消费者模型,代码 开发多进程网路服务程序 多线程使用两个方式实现生产消费模型 多线程这两种方法都可以。 多进程只能使用信号量 cs不同进程- 通信进程 cd同一个进程- 动态
多线程使用两个方式实现生产消费模型生产者消费者模型,代码
开发多进程网路服务程序
-
多线程这两种方法都可以。
-
多进程只能使用信号量
-
cs不同进程-> 通信进程
-
cd同一个进程-> 动态分配,数组。链表等等
-
加锁,
-
通知消费者取走数据。
-
- 互斥锁+ 条件变量(通知)
-
- 两个信号量
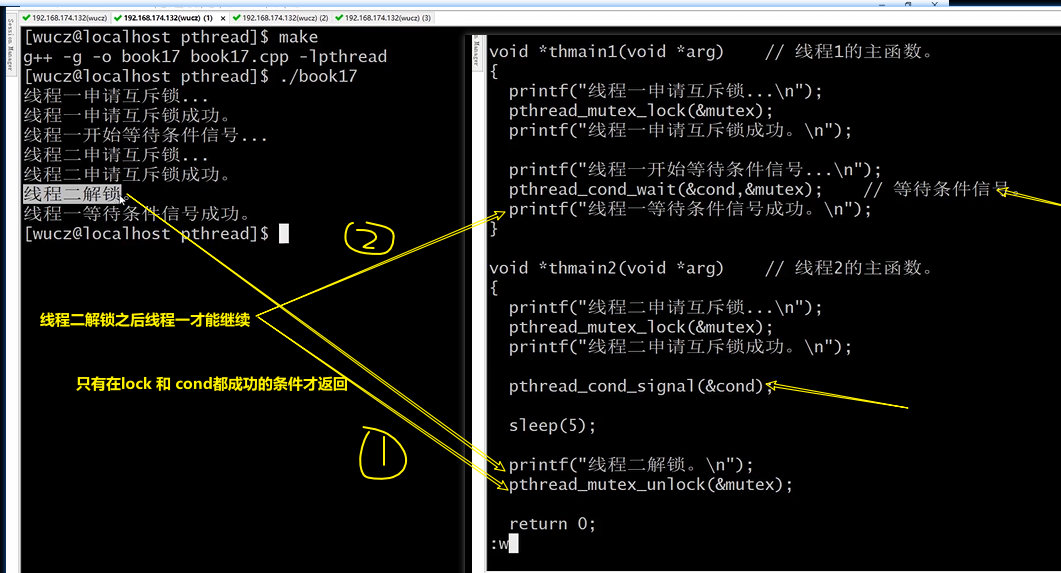
pthread_cond_wait(); 解锁

demo: 演示pthread_cond_wait() 可以把互斥锁解锁
pthread_cond_t cond = PTHREAD_COND_INITIALIZER;// 定义条件变量
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
int max = 0;
void* arg_main1(void* arg) {
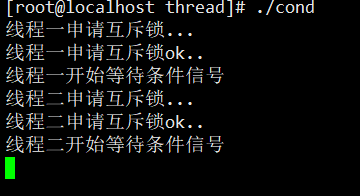
printf("线程一申请互斥锁... \n");
pthread_mutex_lock(&mutex);
printf("线程一申请互斥锁ok.. \n");
printf("线程一开始等待条件信号 \n");
pthread_cond_wait(&cond,&mutex); // 等待条件信号
printf("线程一开始等待条件信号 ok\n");
}
void* arg_main2(void* arg) {
printf("线程二申请互斥锁... \n");
pthread_mutex_lock(&mutex);
printf("线程二申请互斥锁ok.. \n");
printf("线程二开始等待条件信号 \n");
pthread_cond_wait(&cond,&mutex); // 等待条件信号
printf("线程二开始等待条件信号 ok\n");
}
int main()
{
pthread_t pid1,pid2;
pthread_create(&pid1,NULL,&arg_main1,NULL);
sleep(1);
pthread_create(&pid2,NULL,&arg_main2,NULL);
pthread_join(pid1,NULL);
pthread_join(pid2,NULL);
pthread_cond_destroy(&cond);
pthread_mutex_destroy(&mutex);
return 0;
}
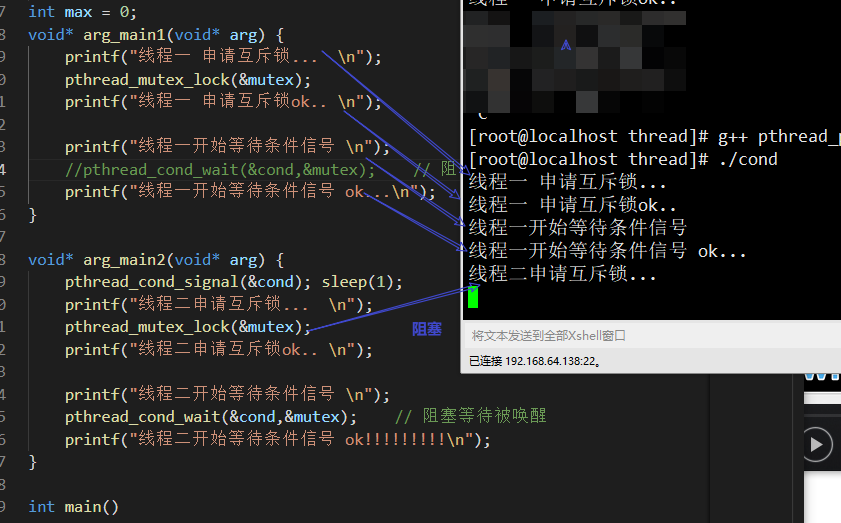
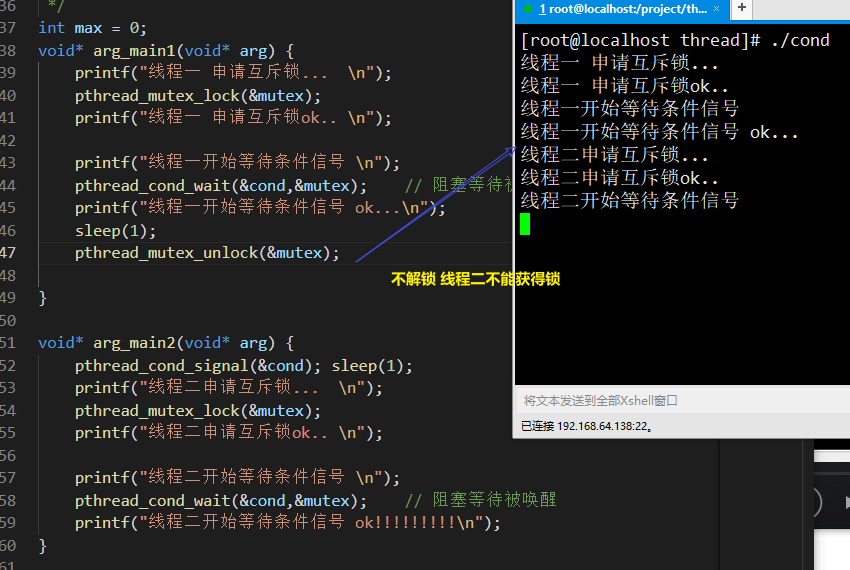
void* arg_main1(void* arg) {
printf("线程一 申请互斥锁... \n");
pthread_mutex_lock(&mutex);
printf("线程一 申请互斥锁ok.. \n");
printf("线程一开始等待条件信号 \n");
pthread_cond_wait(&cond,&mutex); // 阻塞等待被唤醒,条件信号没出现,就一直
printf("线程一结束等待条件信号 ok...\n");
//pthread_mutex_unlock(&mutex);
}
void* arg_main2(void* arg) {
printf("线程二 申请互斥锁... \n");
pthread_mutex_lock(&mutex);
printf("线程二 申请互斥锁ok.. \n");
pthread_cond_signal(&cond); // 唤醒
sleep(8);
printf("解锁。。\n");
pthread_mutex_unlock(&mutex);
}
// 本程序演示用互斥锁和条件变量实现高速缓存。
#include <stdio.h>
#include <pthread.h>
#include <stdlib.h>
#include <unistd.h>
#include <signal.h>
#include <string.h>
#include <vector>
using namespace std;
// 缓存队列消息的结构体。
struct st_message
{
int mesgid; // 消息的id。
char message[1024]; // 消息的内容。
}stmesg;
vector<struct st_message> vcache; // 用vector容器做缓存。
pthread_cond_t cond=PTHREAD_COND_INITIALIZER; // 声明并初始化条件变量。
pthread_mutex_t mutex=PTHREAD_MUTEX_INITIALIZER; // 声明并初始化互斥锁。
void incache(int sig); // 生产者、数据入队。
void *outcache(void *arg); // 消费者、数据出队线程的主函数。
int main()
{
signal(15,incache); // 接收15的信号,调用生产者函数。
// 创建三个消费者线程。
pthread_t thid1,thid2,thid3;
pthread_create(&thid1,NULL,outcache,NULL);
pthread_create(&thid2,NULL,outcache,NULL);
pthread_create(&thid3,NULL,outcache,NULL);
pthread_join(thid1,NULL);
pthread_join(thid2,NULL);
pthread_join(thid3,NULL);
pthread_cond_destroy(&cond);
pthread_mutex_destroy(&mutex);
return 0;
}
void incache(int sig) // 生产者、数据入队。
{
static int mesgid=1; // 消息的计数器。
struct st_message stmesg; // 消息内容。
memset(&stmesg,0,sizeof(struct st_message));
pthread_mutex_lock(&mutex); // 给缓存队列加锁。
// 生产数据,放入缓存队列。
stmesg.mesgid=mesgid++; vcache.push_back(stmesg);
stmesg.mesgid=mesgid++; vcache.push_back(stmesg);
stmesg.mesgid=mesgid++; vcache.push_back(stmesg);
stmesg.mesgid=mesgid++; vcache.push_back(stmesg);
pthread_mutex_unlock(&mutex); // 给缓存队列解锁。
//pthread_cond_signal(&cond); // 发送条件信号,激活一个线程。
pthread_cond_broadcast(&cond); // 发送条件信号,激活全部的线程。
}
void thcleanup(void *arg)
{
// 在这里释放关闭文件、断开网络连接、回滚数据库事务、释放锁等等。
printf("cleanup ok.\n");
pthread_mutex_unlock(&mutex);
/*
A condition wait (whether timed or not) is a cancellation point. When the cancelability type of a thread is set to PTHREAD_CAN_CEL_DEFERRED, a side-effect of acting upon a cancellation request while in a condition wait is that the mutex is (in effect) re-acquired before calling the first cancellation cleanup handler. The effect is as if the thread were unblocked, allowed to execute up to the point of returning from the call to pthread_cond_timedwait() or pthread_cond_wait(), but at that point notices the cancellation request and instead of returning to the caller of pthread_cond_timedwait() or pthread_cond_wait(), starts the thread cancellation activities, which includes calling cancellation cleanup handlers.
意思就是在pthread_cond_wait时执行pthread_cancel后,
要先在线程清理函数中要先解锁已与相应条件变量绑定的mutex,
这样是为了保证pthread_cond_wait可以返回到调用线程。
*/
};
void *outcache(void *arg) // 消费者、数据出队线程的主函数。
{
pthread_cleanup_push(thcleanup,NULL); // 把线程清理函数入栈。
struct st_message stmesg; // 用于存放出队的消息。
while (true)
{
pthread_mutex_lock(&mutex); // 给缓存队列加锁。
// 如果缓存队列为空,等待,用while防止条件变量虚假唤醒。
while (vcache.size()==0)
{
pthread_cond_wait(&cond,&mutex);
}
// 从缓存队列中获取第一条记录,然后删除该记录。
memcpy(&stmesg,&vcache[0],sizeof(struct st_message)); // 内存拷贝。
vcache.erase(vcache.begin());
pthread_mutex_unlock(&mutex); // 给缓存队列解锁。
// 以下是处理业务的代码。
printf("phid=%ld,mesgid=%d\n",pthread_self(),stmesg.mesgid);
usleep(100);
}
pthread_cleanup_pop(1); // 把线程清理函数出栈。
}
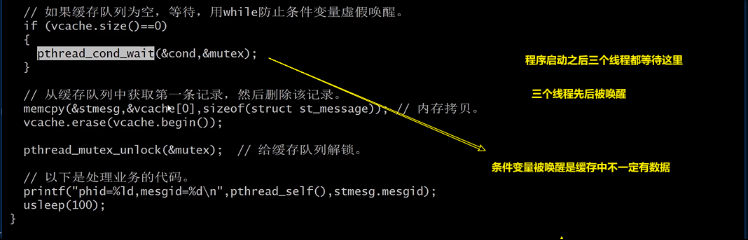
// 条件变量被唤醒,缓存中不一定有数据。
while (vcache.size()==0)
{
pthread_cond_wait(&cond,&mutex);
}
- 在线程清理函数中,释放锁。不然无法正常退出。
void thcleanup(void *arg)
{
// 在这里释放关闭文件、断开网络连接、回滚数据库事务、释放锁等等。
printf("cleanup ok.\n");
pthread_mutex_unlock(&mutex);
/*
A condition wait (whether timed or not) is a cancellation point. When the cancelability type of a thread is set to PTHREAD_CAN_CEL_DEFERRED, a side-effect of acting upon a cancellation request while in a condition wait is that the mutex is (in effect) re-acquired before calling the first cancellation cleanup handler. The effect is as if the thread were unblocked, allowed to execute up to the point of returning from the call to pthread_cond_timedwait() or pthread_cond_wait(), but at that point notices the cancellation request and instead of returning to the caller of pthread_cond_timedwait() or pthread_cond_wait(), starts the thread cancellation activities, which includes calling cancellation cleanup handlers.
意思就是在pthread_cond_wait时执行pthread_cancel后,
要先在线程清理函数中要先解锁已与相应条件变量绑定的mutex,
这样是为了保证pthread_cond_wait可以返回到调用线程。
*/
};