@[toc] 一.前言 我们利用PPO算法来玩“Super Mario Bros”(超级马里奥兄弟)。目前来看,对于绝大部分关卡,智能体都可以在1500个episode内学会过关。 二.PPO算法的基本结构 PPO算法有两种主
@[toc]
一.前言
我们利用PPO算法来玩“Super Mario Bros”(超级马里奥兄弟)。目前来看,对于绝大部分关卡,智能体都可以在1500个episode内学会过关。
二.PPO算法的基本结构
PPO算法有两种主要形式:PPO-Penalty和PPO-Clip(PPO2)。在这里,我们讨论PPO-Clip(OpenAI使用的主要形式)。 PPO的主要特点如下:PPO属于on-policy算法PPO同时适用于离散和连续的动作空间损失函数 PPO-Clip算法最精髓的地方就是加入了一项比例用以描绘新老策略的差异,通过超参数ϵ限制策略的更新步长: 更新策略:
更新策略: 探索策略 PPO采用随机探索策略。优势函数 表示在状态s下采取动作a,相较于其他动作有多少优势,如果>0,则当前动作比平均动作好,反之,则差
探索策略 PPO采用随机探索策略。优势函数 表示在状态s下采取动作a,相较于其他动作有多少优势,如果>0,则当前动作比平均动作好,反之,则差
算法主要流程大致如下: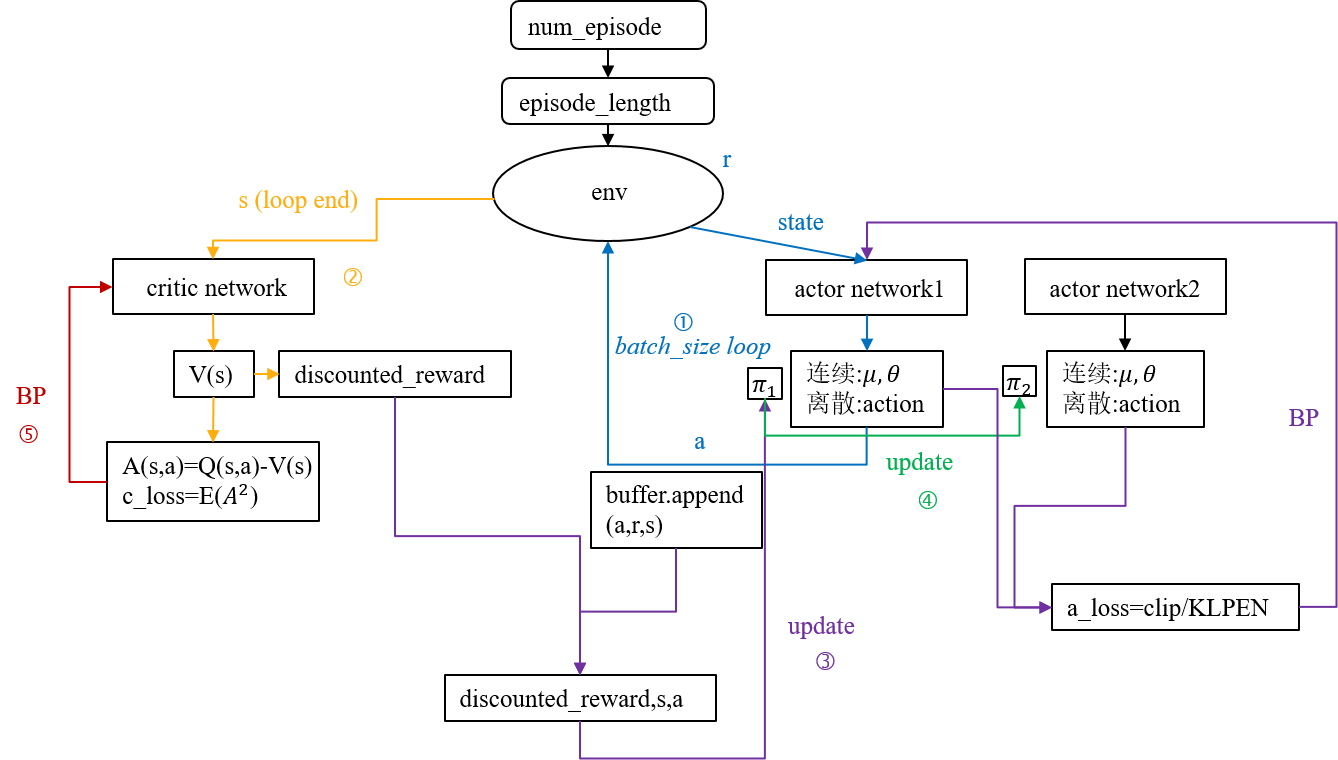
三.进入实操
我们需要先进入我们的华为云实例网址,使用PPO算法玩超级马里奥兄弟我们需要登录华为云账号,点击订阅这个实例,然后才能点击Run in ModelArts,进入 JupyterLab 页面。 我们进入页面,先需要等待,等待30s之后弹出如下页面,让我们选择合适的运行环境,我们选择免费的就好,点击切换规格。
我们进入页面,先需要等待,等待30s之后弹出如下页面,让我们选择合适的运行环境,我们选择免费的就好,点击切换规格。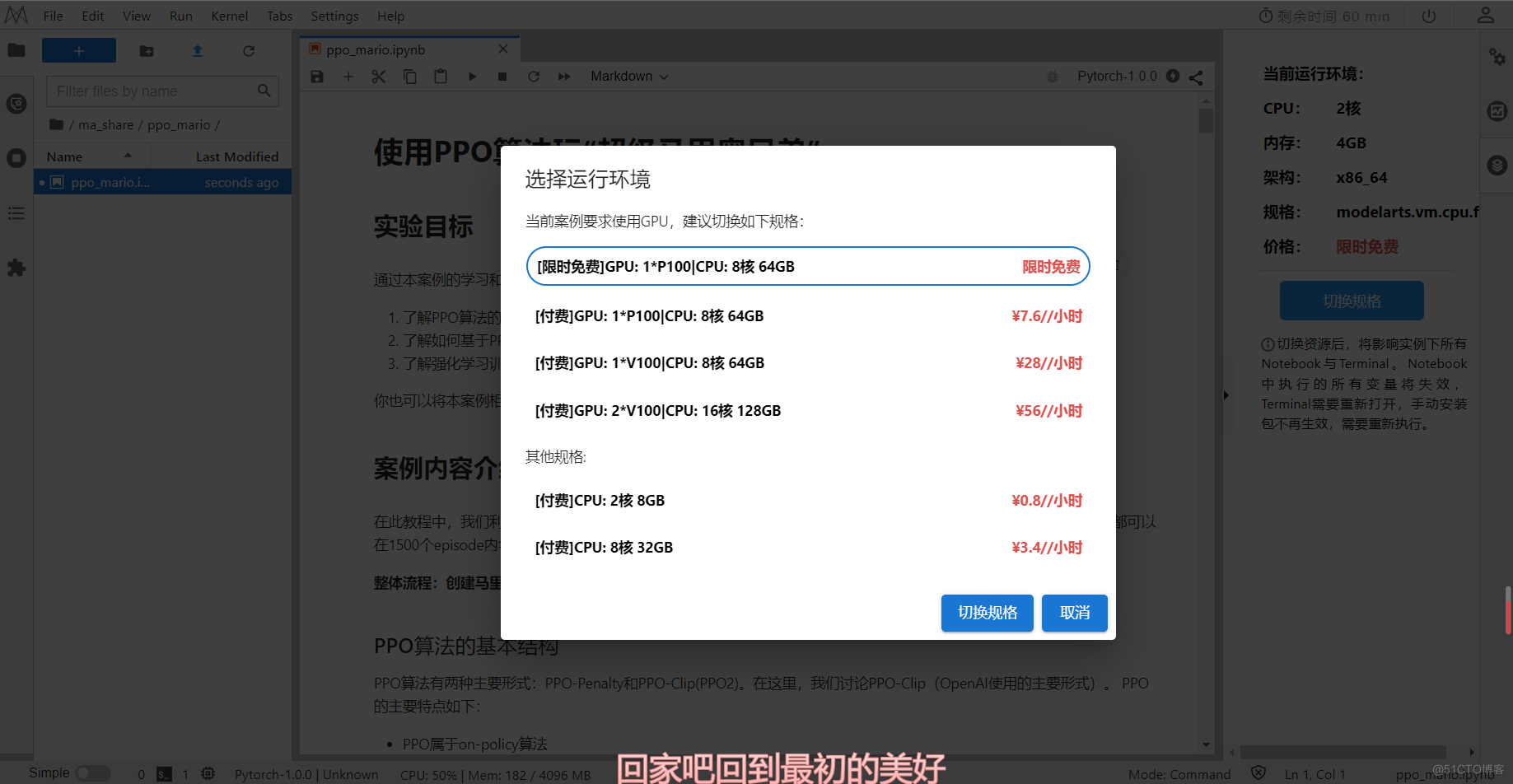 等待切换规格完成:等待初始化完成...
等待切换规格完成:等待初始化完成... 如下图,等待初始化完成。一切就绪
如下图,等待初始化完成。一切就绪
3.1 程序初始化
安装基础依赖
!pip install -U pip !pip install gym==0.19.0 !pip install tqdm==4.48.0 !pip install nes-py==8.1.0 !pip install gym-super-mario-bros==7.3.2
3.2 导入相关的库
import os import shutil import subprocess as sp from collections import deque import numpy as np import torch import torch.nn as nn import torch.nn.functional as F import torch.multiprocessing as _mp from torch.distributions import Categorical import torch.multiprocessing as mp from nes_py.wrappers import JoypadSpace import gym_super_mario_bros from gym.spaces import Box from gym import Wrapper from gym_super_mario_bros.actions import SIMPLE_MOVEMENT, COMPLEX_MOVEMENT, RIGHT_ONLY import cv2 import matplotlib.pyplot as plt from IPython import display import moxing as mox
3.3训练参数初始化
opt={ "world": 1, # 可选大关:1,2,3,4,5,6,7,8 "stage": 1, # 可选小关:1,2,3,4 "action_type": "simple", # 动作类别:"simple","right_only", "complex" 'lr': 1e-4, # 建议学习率:1e-3,1e-4, 1e-5,7e-5 'gamma': 0.9, # 奖励折扣 'tau': 1.0, # GAE参数 'beta': 0.01, # 熵系数 'epsilon': 0.2, # PPO的Clip系数 'batch_size': 16, # 经验回放的batch_size 'max_episode':10, # 最大训练局数 'num_epochs': 10, # 每条经验回放次数 "num_local_steps": 512, # 每局的最大步数 "num_processes": 8, # 训练进程数,一般等于训练机核心数 "save_interval": 5, # 每{}局保存一次模型 "log_path": "./log", # 日志保存路径 "saved_path": "./model", # 训练模型保存路径 "pretrain_model": True, # 是否加载预训练模型,目前只提供1-1关卡的预训练模型,其他需要从零开始训练 "episode":5 }3.4 创建环境
# 创建环境 def create_train_env(world, stage, actions, output_path=None): # 创建基础环境 env = gym_super_mario_bros.make("SuperMarioBros-{}-{}-v0".format(world, stage)) env = JoypadSpace(env, actions) # 对环境自定义 env = CustomReward(env, world, stage, monitor=None) env = CustomSkipFrame(env) return env # 对原始环境进行修改,以获得更好的训练效果 class CustomReward(Wrapper): def __init__(self, env=None, world=None, stage=None, monitor=None): super(CustomReward, self).__init__(env) self.observation_space = Box(low=0, high=255, shape=(1, 84, 84)) self.curr_score = 0 self.current_x = 40 self.world = world self.stage = stage if monitor: self.monitor = monitor else: self.monitor = None def step(self, action): state, reward, done, info = self.env.step(action) if self.monitor: self.monitor.record(state) state = process_frame(state) reward += (info["score"] - self.curr_score) / 40. self.curr_score = info["score"] if done: if info["flag_get"]: reward += 50 else: reward -= 50 if self.world == 7 and self.stage == 4: if (506 <= info["x_pos"] <= 832 and info["y_pos"] > 127) or ( 832 < info["x_pos"] <= 1064 and info["y_pos"] < 80) or ( 1113 < info["x_pos"] <= 1464 and info["y_pos"] < 191) or ( 1579 < info["x_pos"] <= 1943 and info["y_pos"] < 191) or ( 1946 < info["x_pos"] <= 1964 and info["y_pos"] >= 191) or ( 1984 < info["x_pos"] <= 2060 and (info["y_pos"] >= 191 or info["y_pos"] < 127)) or ( 2114 < info["x_pos"] < 2440 and info["y_pos"] < 191) or info["x_pos"] < self.current_x - 500: reward -= 50 done = True if self.world == 4 and self.stage == 4: if (info["x_pos"] <= 1500 and info["y_pos"] < 127) or ( 1588 <= info["x_pos"] < 2380 and info["y_pos"] >= 127): reward = -50 done = True self.current_x = info["x_pos"] return state, reward / 10., done, info def reset(self): self.curr_score = 0 self.current_x = 40 return process_frame(self.env.reset()) class MultipleEnvironments: def __init__(self, world, stage, action_type, num_envs, output_path=None): self.agent_conns, self.env_conns = zip(*[mp.Pipe() for _ in range(num_envs)]) if action_type == "right_only": actions = RIGHT_ONLY elif action_type == "simple": actions = SIMPLE_MOVEMENT else: actions = COMPLEX_MOVEMENT self.envs = [create_train_env(world, stage, actions, output_path=output_path) for _ in range(num_envs)] self.num_states = self.envs[0].observation_space.shape[0] self.num_actions = len(actions) for index in range(num_envs): process = mp.Process(target=self.run, args=(index,)) process.start() self.env_conns[index].close() def run(self, index): self.agent_conns[index].close() while True: request, action = self.env_conns[index].recv() if request == "step": self.env_conns[index].send(self.envs[index].step(action.item())) elif request == "reset": self.env_conns[index].send(self.envs[index].reset()) else: raise NotImplementedError def process_frame(frame): if frame is not None: frame = cv2.cvtColor(frame, cv2.COLOR_RGB2GRAY) frame = cv2.resize(frame, (84, 84))[None, :, :] / 255. return frame else: return np.zeros((1, 84, 84)) class CustomSkipFrame(Wrapper): def __init__(self, env, skip=4): super(CustomSkipFrame, self).__init__(env) self.observation_space = Box(low=0, high=255, shape=(skip, 84, 84)) self.skip = skip self.states = np.zeros((skip, 84, 84), dtype=np.float32) def step(self, action): total_reward = 0 last_states = [] for i in range(self.skip): state, reward, done, info = self.env.step(action) total_reward += reward if i >= self.skip / 2: last_states.append(state) if done: self.reset() return self.states[None, :, :, :].astype(np.float32), total_reward, done, info max_state = np.max(np.concatenate(last_states, 0), 0) self.states[:-1] = self.states[1:] self.states[-1] = max_state return self.states[None, :, :, :].astype(np.float32), total_reward, done, info def reset(self): state = self.env.reset() self.states = np.concatenate([state for _ in range(self.skip)], 0) return self.states[None, :, :, :].astype(np.float32)3.5定义神经网络
class Net(nn.Module): def __init__(self, num_inputs, num_actions): super(Net, self).__init__() self.conv1 = nn.Conv2d(num_inputs, 32, 3, stride=2, padding=1) self.conv2 = nn.Conv2d(32, 32, 3, stride=2, padding=1) self.conv3 = nn.Conv2d(32, 32, 3, stride=2, padding=1) self.conv4 = nn.Conv2d(32, 32, 3, stride=2, padding=1) self.linear = nn.Linear(32 * 6 * 6, 512) self.critic_linear = nn.Linear(512, 1) self.actor_linear = nn.Linear(512, num_actions) self._initialize_weights() def _initialize_weights(self): for module in self.modules(): if isinstance(module, nn.Conv2d) or isinstance(module, nn.Linear): nn.init.orthogonal_(module.weight, nn.init.calculate_gain('relu')) nn.init.constant_(module.bias, 0) def forward(self, x): x = F.relu(self.conv1(x)) x = F.relu(self.conv2(x)) x = F.relu(self.conv3(x)) x = F.relu(self.conv4(x)) x = self.linear(x.view(x.size(0), -1)) return self.actor_linear(x), self.critic_linear(x)
3.6 定义PPO算法
def evaluation(opt, global_model, num_states, num_actions,curr_episode): print('start evalution !') torch.manual_seed(123) if opt['action_type'] == "right": actions = RIGHT_ONLY elif opt['action_type'] == "simple": actions = SIMPLE_MOVEMENT else: actions = COMPLEX_MOVEMENT env = create_train_env(opt['world'], opt['stage'], actions) local_model = Net(num_states, num_actions) if torch.cuda.is_available(): local_model.cuda() local_model.eval() state = torch.from_numpy(env.reset()) if torch.cuda.is_available(): state = state.cuda() plt.figure(figsize=(10,10)) img = plt.imshow(env.render(mode='rgb_array')) done=False local_model.load_state_dict(global_model.state_dict()) #加载网络参数\ while not done: if torch.cuda.is_available(): state = state.cuda() logits, value = local_model(state) policy = F.softmax(logits, dim=1) action = torch.argmax(policy).item() state, reward, done, info = env.step(action) state = torch.from_numpy(state) img.set_data(env.render(mode='rgb_array')) # just update the data display.display(plt.gcf()) display.clear_output(wait=True) if info["flag_get"]: print("flag getted in episode:{}!".format(curr_episode)) torch.save(local_model.state_dict(), "{}/ppo_super_mario_bros_{}_{}_{}".format(opt['saved_path'], opt['world'], opt['stage'],curr_episode)) opt.update({'episode':curr_episode}) env.close() return True return False def train(opt): #判断cuda是否可用 if torch.cuda.is_available(): torch.cuda.manual_seed(123) else: torch.manual_seed(123) if os.path.isdir(opt['log_path']): shutil.rmtree(opt['log_path']) os.makedirs(opt['log_path']) if not os.path.isdir(opt['saved_path']): os.makedirs(opt['saved_path']) mp = _mp.get_context("spawn") #创建环境 envs = MultipleEnvironments(opt['world'], opt['stage'], opt['action_type'], opt['num_processes']) #创建模型 model = Net(envs.num_states, envs.num_actions) if opt['pretrain_model']: print('加载预训练模型') if not os.path.exists("ppo_super_mario_bros_1_1_0"): mox.file.copy_parallel( "obs://modelarts-labs-bj4/course/modelarts/zjc_team/reinforcement_learning/ppo_mario/ppo_super_mario_bros_1_1_0", "ppo_super_mario_bros_1_1_0") if torch.cuda.is_available(): model.load_state_dict(torch.load("ppo_super_mario_bros_1_1_0")) model.cuda() else: model.load_state_dict(torch.load("ppo_super_mario_bros_1_1_0",torch.device('cpu'))) else: model.cuda() model.share_memory() optimizer = torch.optim.Adam(model.parameters(), lr=opt['lr']) #环境重置 [agent_conn.send(("reset", None)) for agent_conn in envs.agent_conns] #接收当前状态 curr_states = [agent_conn.recv() for agent_conn in envs.agent_conns] curr_states = torch.from_numpy(np.concatenate(curr_states, 0)) if torch.cuda.is_available(): curr_states = curr_states.cuda() curr_episode = 0 #在最大局数内训练 while curr_episode<opt['max_episode']: if curr_episode % opt['save_interval'] == 0 and curr_episode > 0: torch.save(model.state_dict(), "{}/ppo_super_mario_bros_{}_{}_{}".format(opt['saved_path'], opt['world'], opt['stage'], curr_episode)) curr_episode += 1 old_log_policies = [] actions = [] values = [] states = [] rewards = [] dones = [] #一局内最大步数 for _ in range(opt['num_local_steps']): states.append(curr_states) logits, value = model(curr_states) values.append(value.squeeze()) policy = F.softmax(logits, dim=1) old_m = Categorical(policy) action = old_m.sample() actions.append(action) old_log_policy = old_m.log_prob(action) old_log_policies.append(old_log_policy) #执行action if torch.cuda.is_available(): [agent_conn.send(("step", act)) for agent_conn, act in zip(envs.agent_conns, action.cpu())] else: [agent_conn.send(("step", act)) for agent_conn, act in zip(envs.agent_conns, action)] state, reward, done, info = zip(*[agent_conn.recv() for agent_conn in envs.agent_conns]) state = torch.from_numpy(np.concatenate(state, 0)) if torch.cuda.is_available(): state = state.cuda() reward = torch.cuda.FloatTensor(reward) done = torch.cuda.FloatTensor(done) else: reward = torch.FloatTensor(reward) done = torch.FloatTensor(done) rewards.append(reward) dones.append(done) curr_states = state _, next_value, = model(curr_states) next_value = next_value.squeeze() old_log_policies = torch.cat(old_log_policies).detach() actions = torch.cat(actions) values = torch.cat(values).detach() states = torch.cat(states) gae = 0 R = [] #gae计算 for value, reward, done in list(zip(values, rewards, dones))[::-1]: gae = gae * opt['gamma'] * opt['tau'] gae = gae + reward + opt['gamma'] * next_value.detach() * (1 - done) - value.detach() next_value = value R.append(gae + value) R = R[::-1] R = torch.cat(R).detach() advantages = R - values #策略更新 for i in range(opt['num_epochs']): indice = torch.randperm(opt['num_local_steps'] * opt['num_processes']) for j in range(opt['batch_size']): batch_indices = indice[ int(j * (opt['num_local_steps'] * opt['num_processes'] / opt['batch_size'])): int((j + 1) * ( opt['num_local_steps'] * opt['num_processes'] / opt['batch_size']))] logits, value = model(states[batch_indices]) new_policy = F.softmax(logits, dim=1) new_m = Categorical(new_policy) new_log_policy = new_m.log_prob(actions[batch_indices]) ratio = torch.exp(new_log_policy - old_log_policies[batch_indices]) actor_loss = -torch.mean(torch.min(ratio * advantages[batch_indices], torch.clamp(ratio, 1.0 - opt['epsilon'], 1.0 + opt['epsilon']) * advantages[ batch_indices])) critic_loss = F.smooth_l1_loss(R[batch_indices], value.squeeze()) entropy_loss = torch.mean(new_m.entropy()) #损失函数包含三个部分:actor损失,critic损失,和动作entropy损失 total_loss = actor_loss + critic_loss - opt['beta'] * entropy_loss optimizer.zero_grad() total_loss.backward() torch.nn.utils.clip_grad_norm_(model.parameters(), 0.5) optimizer.step() print("Episode: {}. Total loss: {}".format(curr_episode, total_loss)) finish=False for i in range(opt["num_processes"]): if info[i]["flag_get"]: finish=evaluation(opt, model,envs.num_states, envs.num_actions,curr_episode) if finish: break if finish: break3.7 训练模型
训练10 Episode,耗时约5分钟
train(opt)这里比较费时间哈,多等待,正在训练模型中...我这里花了2.6分钟哈,还是比较快的,如图:
3.8 使用模型推理游戏
定义推理函数
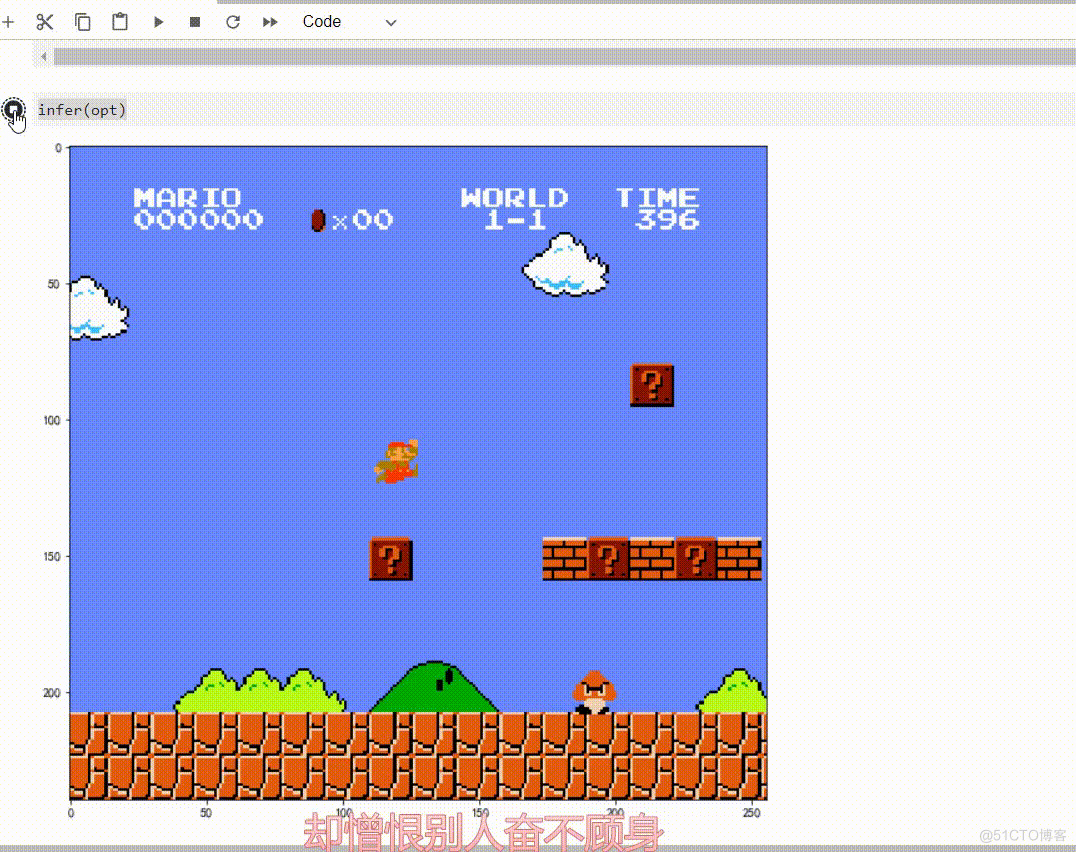
def infer(opt): if torch.cuda.is_available(): torch.cuda.manual_seed(123) else: torch.manual_seed(123) if opt['action_type'] == "right": actions = RIGHT_ONLY elif opt['action_type'] == "simple": actions = SIMPLE_MOVEMENT else: actions = COMPLEX_MOVEMENT env = create_train_env(opt['world'], opt['stage'], actions) model = Net(env.observation_space.shape[0], len(actions)) if torch.cuda.is_available(): model.load_state_dict(torch.load("{}/ppo_super_mario_bros_{}_{}_{}".format(opt['saved_path'],opt['world'], opt['stage'],opt['episode']))) model.cuda() else: model.load_state_dict(torch.load("{}/ppo_super_mario_bros_{}_{}_{}".format(opt['saved_path'], opt['world'], opt['stage'],opt['episode']), map_location=torch.device('cpu'))) model.eval() state = torch.from_numpy(env.reset()) plt.figure(figsize=(10,10)) img = plt.imshow(env.render(mode='rgb_array')) while True: if torch.cuda.is_available(): state = state.cuda() logits, value = model(state) policy = F.softmax(logits, dim=1) action = torch.argmax(policy).item() state, reward, done, info = env.step(action) state = torch.from_numpy(state) img.set_data(env.render(mode='rgb_array')) # just update the data display.display(plt.gcf()) display.clear_output(wait=True) if info["flag_get"]: print("World {} stage {} completed".format(opt['world'], opt['stage'])) break if done and info["flag_get"] is False: print('Game Failed') break运行
infer(opt)
四.成果展示