1. 概述
动态规划算法应用非常之广泛。
对于算法学习者而言,不跨过动态规划这道门,不算真正了解算法。
初接触动态规划者,理解其思想精髓会存在一定的难度,本文将通过一个案例,抽丝剥茧般和大家聊聊动态规划。
动态规划算法有 3 个重要的概念:
- 重叠子问题。
- 最优子结构。
- 状态转移。
只有吃透这 3 个概念,才叫真正理解什么是动态规划。
什么是重叠子问题?
动态规划和分治算法有一个相似之处。
将原问题分解成相似的子问题,在求解的过程中通过子问题的解求出原问题的解。
动态规划与分治算法的区别:
-
分治算法的每一个子问题具有完全独立性,只会被计算一次。
二分查找是典型的分治算法实现,其子问题是把数列缩小后再二分查找,每一个子问题只会被计算一次。
-
动态规划经分解得到的子问题往往不是互相独立的,有些子问题会被重复计算多次,这便是重叠子问题。
- 同一个子问题被计算多次,完全是没有必要的,可以缓存已经计算过的子问题,再次需要子问题结果时只需要从缓存中获取便可。这便是动态规划中的典型操作,优化重叠子问题,通过空间换时间的优化手段提高性能。
重叠子问题并不是动态规划的专利,重叠子问题是一个很普见的现象。
什么最优子结构?
最优子结构是动态规划的必要条件。因为动态规划只能应用于具有最优子结构的问题,在解决一个原始问题时,是否能套用动态规划算法,分析是否存在最优子结构是关键。
那么!到底什么是最优子结构?概念其实很简单,局部最优解能决定全局最优解。
如拔河比赛中。如果 A队中的每一名成员的力气都是每一个班上最大的,由他们组成的拔河队毫无疑问,一定是也是所有拔河队中实力最强的。
如果把求解哪一个团队的力量最大当成原始问题,则每一个人的力量是否最大就是子问题,则子问题的最优决定了原始问题的最优。
所以,动态规划多用于求最值的应用场景。
不是说有 3 个概念吗!
不急,先把状态转移这个概念放一放,稍后再解释。
2. 流程
下面以一个案例的解决过程描述使用动态规划的流程。
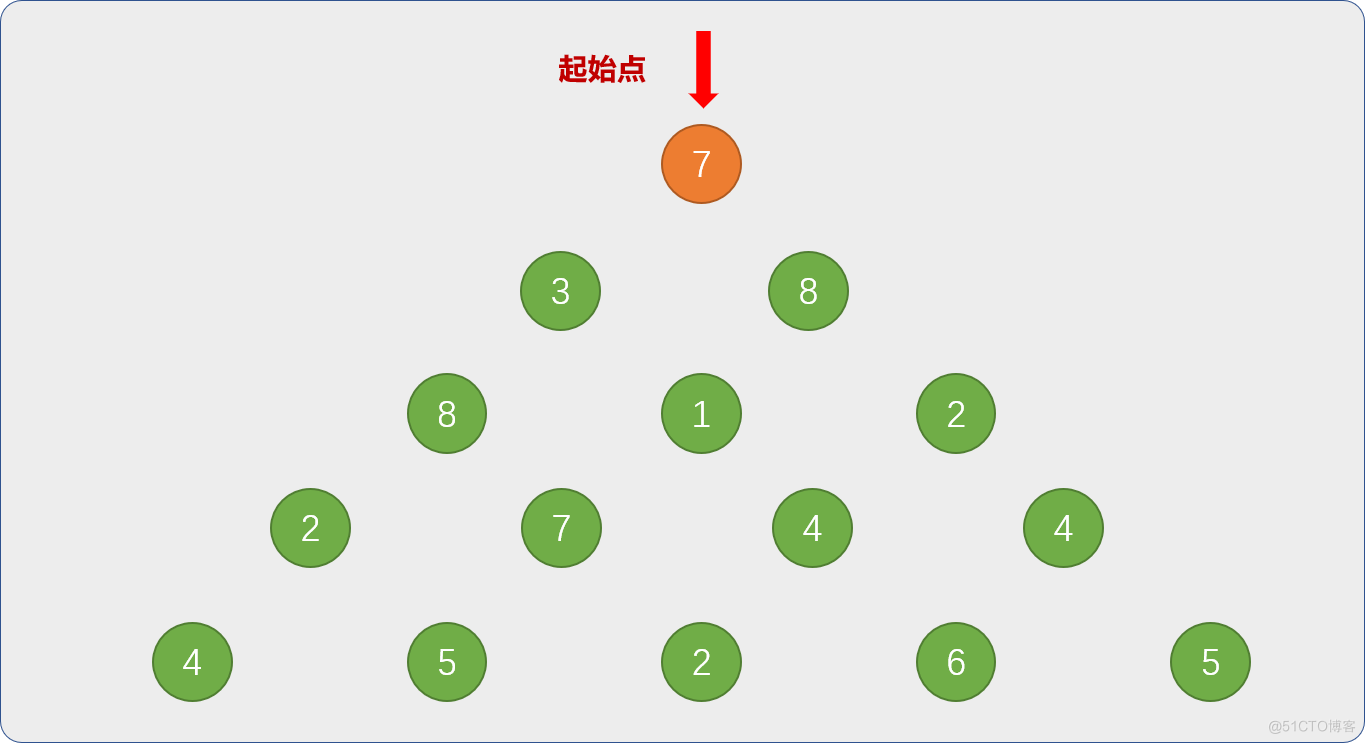
问题描述:小兔子的难题。
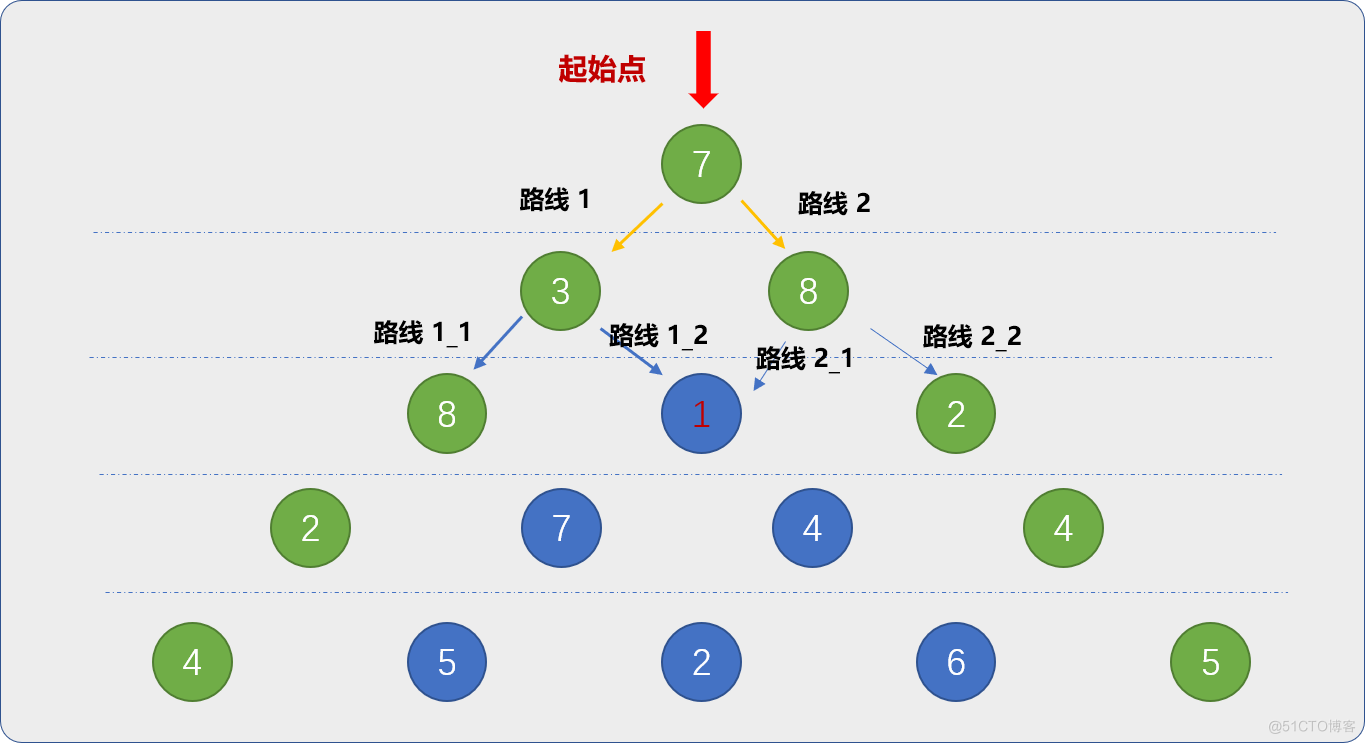
有一只小兔子站在一片三角形的胡萝卜地的入口,如下图所示,图中的数字表示每一个坑中胡萝卜的数量,小兔子每次只能跳到左下角或者右下角的坑中,请问小兔子怎么跳才能得到最多数量的胡萝卜?
首先这个问题是求最值问题, 是否能够使用动态规划求解,则需要一步一步分析,看是否有满足使用动态规划的条件。
2.1 是否存在子问题
先来一个分治思想:思考或观察是否能把原始问题分解成相似的子问题,把解决问题的希望寄托在子问题上。
那么,针对上述三角形数列,是否存在子问题?
现在从数字7出发,兔子有 2 条可行路线。
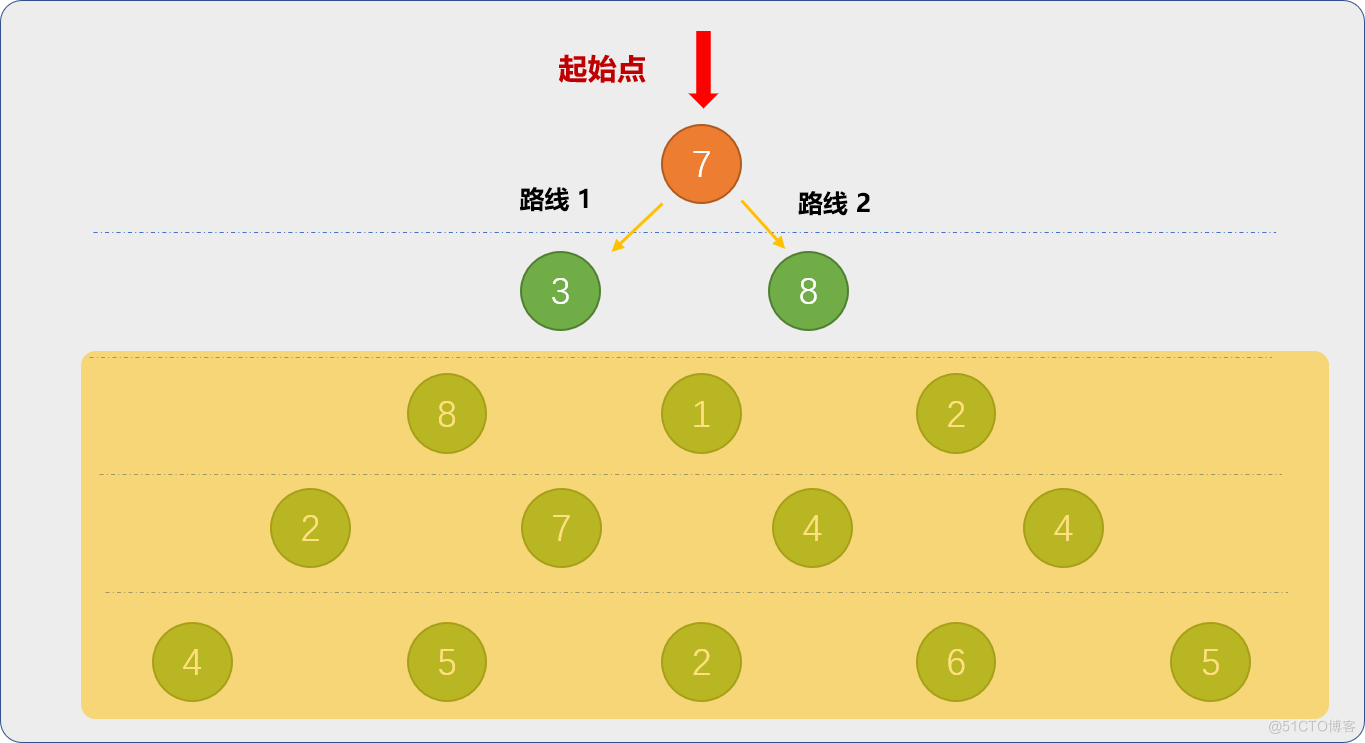
为了便于理解,首先模糊第 3 行后面的数字或假设第 3行之后根本不存在。
那么原始问题就变成:
-
先分别求解路线 1 和路线 2上的最大值。路线 1的最大值为 3,路线 2上的最大值是8。
-
然后求解出路线 1和路线 2两者之间的最大值 8。 把求得的结果和出发点的数字 7 相加,7+8=15 就是最后答案。
只有 2 行时,兔子能获得的最多萝卜数为 15,肉眼便能看的出来。
前面是假设第 3 行之后都不存在,现在把第 3 行放开,则路线 1 路线2的最大值就要发生变化,但是,对于原始问题来讲,可以不用关心路线 1 和路线 2 是怎么获取到最大值,交给子问题自己处理就可以了。
反正,到时从路线 1 和路线 2 的结果中再选择一个最大值就是。
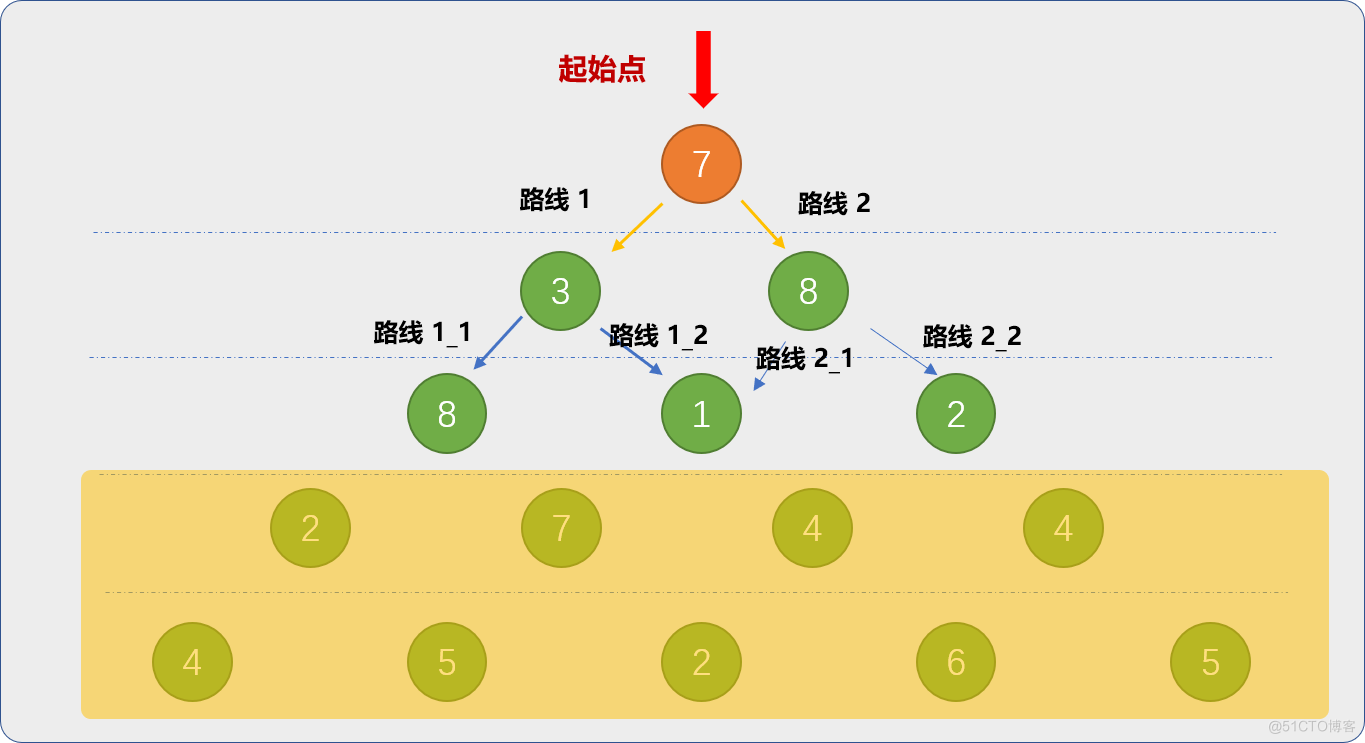
把第 3 行放开后,路线 1 就要重新更新最大值,如上图所示,路线 1也可以分解成子问题,分解后,也只需要关心子问题的返回结果。
- 路线 1 的子问题有 2个,路线 1_1和路线1_2。求解 2 个子问题的最大值后,再在 2个子问题中选择最大值8,最后路线 1的最大值为3+8=11。
- 路线 2 的子问题有 2个,路线 2_1和路线2_2。求解 2 个子问题的最大值后,再在 2个子问题中选择最大值2,最后路线 2的最大值为8+2=10。
当第 3 行放开后,更新路线 1和路线2的最大值,对于原始问题而言,它只需要再在 2 个子问题中选择最大值 11,最终问题的解为7+11=18。
如果放开第 4 行,将重演上述的过程。和原始问题一样,都是从一个点出发,求解此点到目标行的最大值。所以说,此问题是存在子问题的。
并且,只要找到子问题的最优解,就能得到最终原始问题的最优解。不仅存在子问题,而且存在最优子结构。
显然,这很符合递归套路:递进给子问题,回溯子问题的结果。
-
使用二维数列表保存三角形数列中的所有数据。a=[[7],[3,8],[8,1,2],[2,7,4,4],[4,5,2,6,5]]。
-
原始问题为 f(0,0)从数列的(0,0)出发,向左下角和右下角前行,一直找到此路径上的数字相加为最大。
f(0,0)表示以第 1 行的第 1 列数字为起始点。
-
分解原始问题 f(0,0)=a(0,0)+max(f(1,0)+f(1,1))。
-
因为每一个子问题又可以分解,让表达式更通用 f(i,j)=a(i,j)+max(f(i+1,j)+f(i+1,j+1))。
(i+1,j)表示 (i,j)的左下角,(i+1,j+1)表示 (i,j)的右下角,
编码实现:
# 已经数列 nums = [[7], [3, 8], [8, 1, 2], [2, 7, 4, 4], [4, 5, 2, 6, 5]] # 递归函数 def get_max_lb(i, j): if i == len(nums) - 1: # 递归出口 return nums[i][j] # 分解子问题 return nums[i][j] + max(get_max_lb(i + 1, j), get_max_lb(i + 1, j + 1)) # 测试 res = get_max_lb(0, 0) print(res) ''' 输出结果 30 '''不是说要聊聊动态规划的流程吗!怎么跑到递归上去了。
其实所有能套用动态规划的算法题,都可以使用递归实现,因递归平时接触多,从递归切入,可能更容易理解。
2.2 是否存在重叠子问题
先做一个实验,增加三角形数的行数,也就是延长路径线。
import random nums = [] # 递归函数 def get_max_lb(i, j): if i == len(nums) - 1: return nums[i][j] return nums[i][j] + max(get_max_lb(i + 1, j), get_max_lb(i + 1, j + 1)) # 构建 100 行的二维列表 for i in range(100): nums.append([]) for j in range(i + 1): nums[i].append(random.randint(1, 100)) res = get_max_lb(0, 0) print(res)执行程序后,久久没有得到结果,甚至会超时。原因何在?如下图:
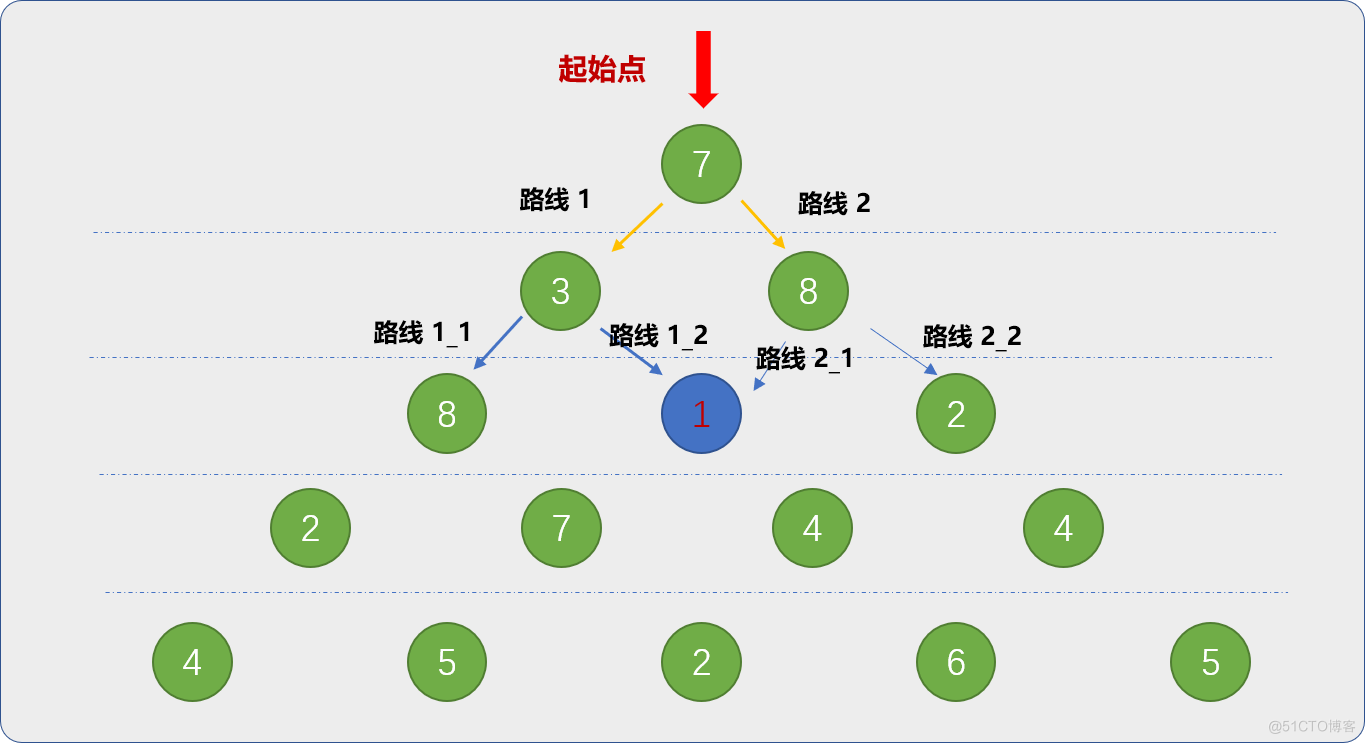
路线1_2和路线2_1的起点都是从同一个地方(蓝色标注的位置)出发。显然,从数字 1(蓝色标注的数字)出发的这条路径会被计算 2 次。在上图中被重复计算的子路径可不止一条。
这便是重叠子问题!子问题被重复计算。
当三角形数列的数据不是很多时,重复计算对整个程序的性能的影响微不足道 。如果数据很多时,大量的重复计算会让计算机性能低下,并可能导致最后崩溃。
因为使用递归的时间复杂度为O(2^n)。当数据的行数变多时,可想而知,性能有多低下。
怎么解决重叠子问题?
答案是:使用缓存,把曾经计算过的子问题结果缓存起来,当再次需要子问题结果时,直接从缓存中获取,就没有必要再次计算。
这里使用字典作为缓存器,以子问题的起始位置为关键字,以子问题的结果为值。
import random def get_max_lb(i, j): if i == len(nums) - 1: return nums[i][j] left_max = None right_max = None if (i + 1, j) in dic.keys(): # 检查缓存中是否存在子问题的结果 left_max = dic[i + 1, j] else: # 缓存中没有,才递归求解 left_max = get_max_lb(i + 1, j) # 求解后的结果缓存起来 dic[(i + 1, j)] = left_max if (i + 1, j + 1) in dic.keys(): right_max = dic[i + 1, j + 1] else: right_max = get_max_lb(i + 1, j + 1) dic[(i + 1, j + 1)] = right_max return nums[i][j] + max(left_max, right_max) # 已经数列 nums = [] # 缓存器 dic = {} for i in range(100): nums.append([]) for j in range(i + 1): nums[i].append(random.randint(1, 100)) # 递归调用 res = get_max_lb(0, 0) print(res)因使用随机数生成数据,每次运行结果不一样。但是,每次运行后的速度是非常给力的。
当出现重叠子问题时,可以缓存曾经计算过的子问题。
好 !现在到了关键时刻,屏住呼吸,从分析缓存中的数据开始。
使用递归解决问题,从结构上可以看出是从上向下的一种处理机制。所谓从上向下,也就是由原始问题开始一路去寻找答案。从本题来讲,就是从第一行一直找到最后一行,或者说从未知找到`已知。
根据递归的特点,可知缓存数据的操作是在回溯过程中发生的。
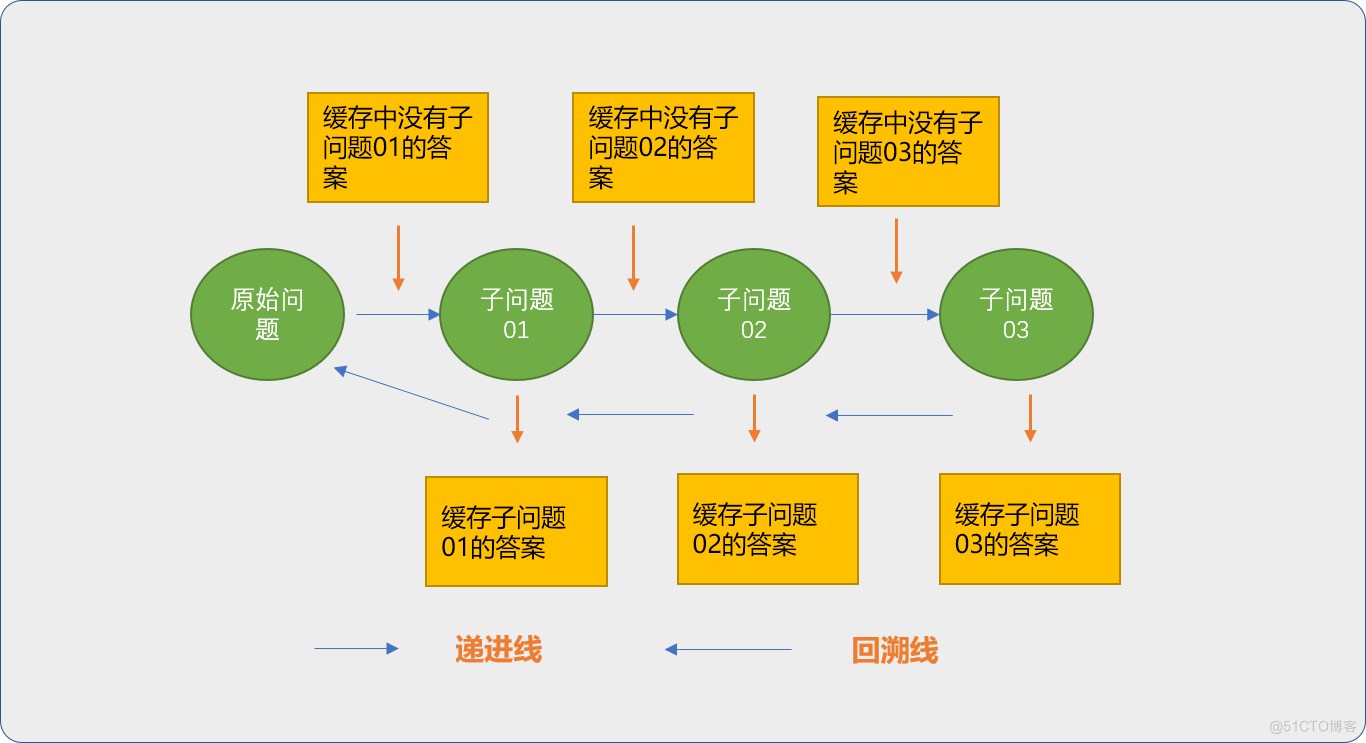
当再次需要调用某一个子问题时,这时才有可能从缓存中获取到已经计算出来的结果。缓存中的数据是每一个子问题的结果,如果知道了某一个子问题,就可以通过子问题计算出父问题。
这时,可能就会有一个想法?
从已知找到未知。
任何一条路径只有到达最后一行后才能知道最后的结果。可以认为,最后一行是已知数据。先缓存最后一行,那么倒数第 2 行每一个位置到最后一行的路径的最大值就可以直接求出来。
同理,知道了倒数第 2 行的每一个位置的路径最大值,就可以求解出倒数第 3行每一个位置上的最大值。以此类推一直到第 1 行。
天呀!多完美,还用什么递归。
可以认为这种思想便是动态规划的核心:自下向上。
2.3 状态转移
还差最后一步,就能把前面的递归转换成动态规划实现。
什么是状态转移?
前面分析从最后 1 开始求最大值过程,是不是有点像田径场上的多人接力赛跑,第 1 名运动力争跑第 1,把状态转移给第 2名运动员,第 2名运动员持续保持第 1,然后把状态转移给第 3运动员,第 3名运动员也保持他这一圈的第 1,一至到最后一名运动员,都保持自己所在那一圈中的第 1。很显然最后结果,他们这个团队一定是第 1名。
把子问题的值传递给另一个子问题,这便是状态转移。当然在转移过程中,一定会存在一个表达式,用来计算如何转移。
用来保存每一个子问题状态的表称为 dp 表,其实就是前面递归中的缓存器。
用来计算如何转移的表达式,称为状态转移方程式。
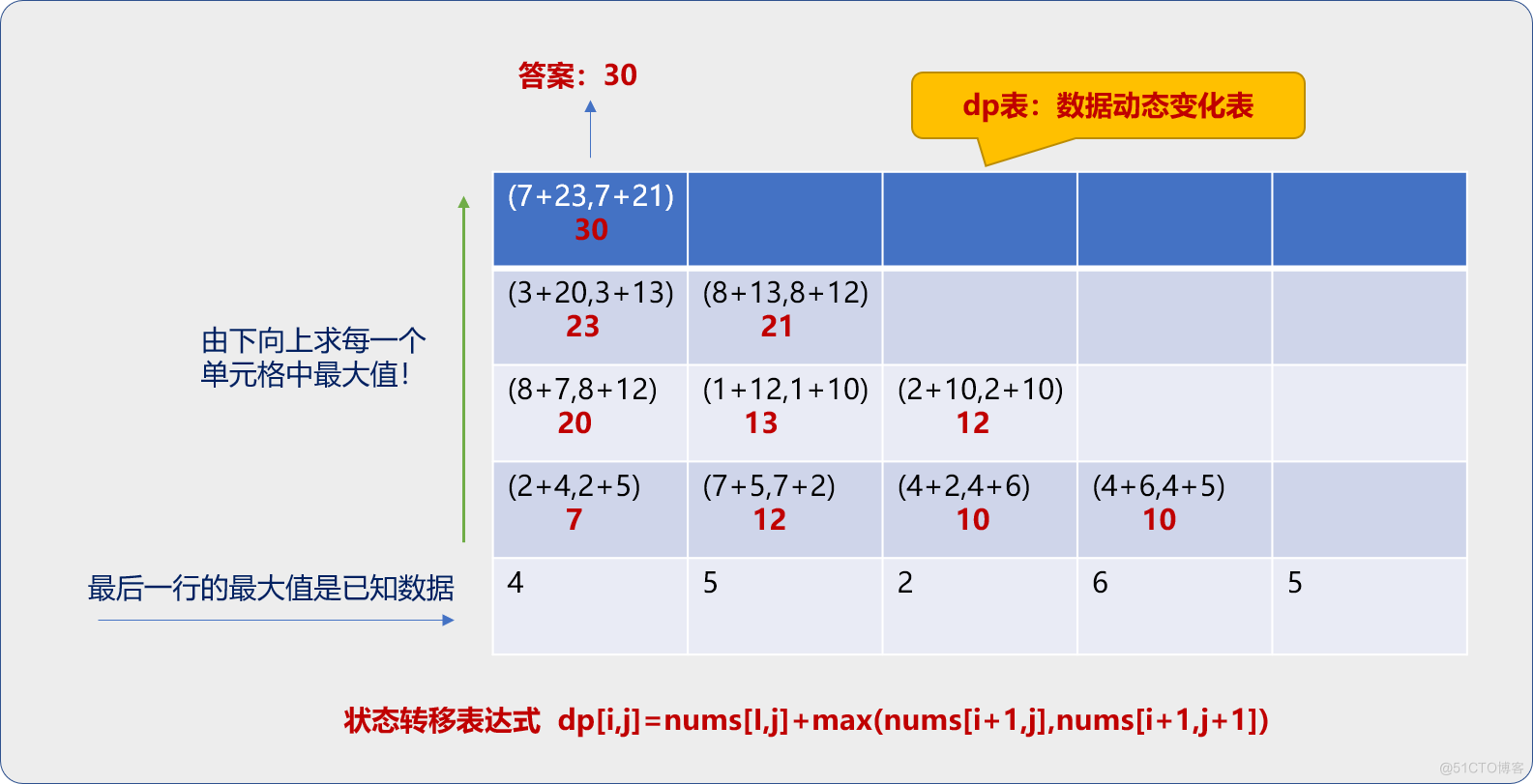
有了上述的这张表,就可以使用动态规划自下向上的方式解决“兔子的难题”这个问题。
nums = [[7], [3, 8], [8, 1, 2], [2, 7, 4, 4], [4, 5, 2, 6, 5]] # dp列表 dp = [] idx = 0 # 从最后一行开始 for i in range(len(nums) - 1, -1, -1): dp.append([]) for j in range(len(nums[i])): if i == len(nums) - 1: # 最后一行缓存于状态转移表中 dp[idx].append(nums[i][j]) else: dp[idx].append(nums[i][j] + max(dp[idx - 1][j], dp[idx - 1][j + 1])) idx += 1 print(dp) ''' 输出结果: [[4, 5, 2, 6, 5], [7, 12, 10, 10], [20, 13, 12], [23, 21], [30]] '''程序运行后,最终输出结果和前面手工绘制的dp表中的数据一模一样。
其实动态规划实现是前面递归操作的逆过程。时间复杂度是O(n^2)。
并不是所有的递归操作都可以使用动态规划进行逆操作,只有符合动态规划条件的递归操作才可以。
上述解决问题时,使用了一个二维列表充当dp表,并保存所有的中间信息。
思考一下,真的有必要保存所有的中间信息吗?
在状态转移过程中,我们仅关心当前得到的状态信息,曾经的状态信息其实完全可以不用保存。
所以,上述程序完全可以使用一个一维列表来存储状态信息。
nums = [[7], [3, 8], [8, 1, 2], [2, 7, 4, 4], [4, 5, 2, 6, 5]] # dp表 dp = [] # 临时表 tmp = [] # 从最后一行开始 for i in range(len(nums) - 1, -1, -1): # 把上一步得到的状态数据提出来 tmp = dp.copy() # 清除 dp 表中原来的数据,准备保存最新的状态数据 dp.clear() for j in range(len(nums[i])): if i == len(nums) - 1: # 最后一行缓存于状态转移表中 dp.append(nums[i][j]) else: dp.append(nums[i][j] + max(tmp[j], tmp[j + 1])) print(dp) ''' 输出结果: [30] '''3.总结
动态规划问题一般都可以使用递归实现,递归是一种自上向下的解决方案,而动态规划是自下向上的解决方案,两者在解决同一个问题时的思考角度不一样,但本质是一样的。
并不是所有的递归操作都能转换成动态规划,是否能使用动态规划算法,则需要原始问题符合最优子结构和重叠子问题这 2 个条件。在使用动态规划过程中,找到状态转移表达式是关键。