1 简介 短时交通流预测是实现智能交通控制与管理,交通流状态辨识和实时交通流诱导的前提及关键,也是智能化交通管理的客观需要.到目前为止,它的研究结果都不尽如人意.现有的以精
1 简介
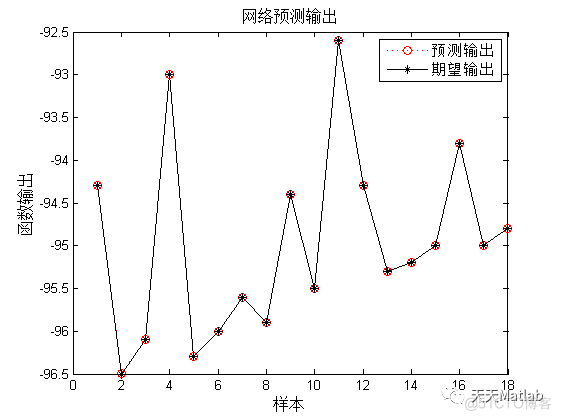
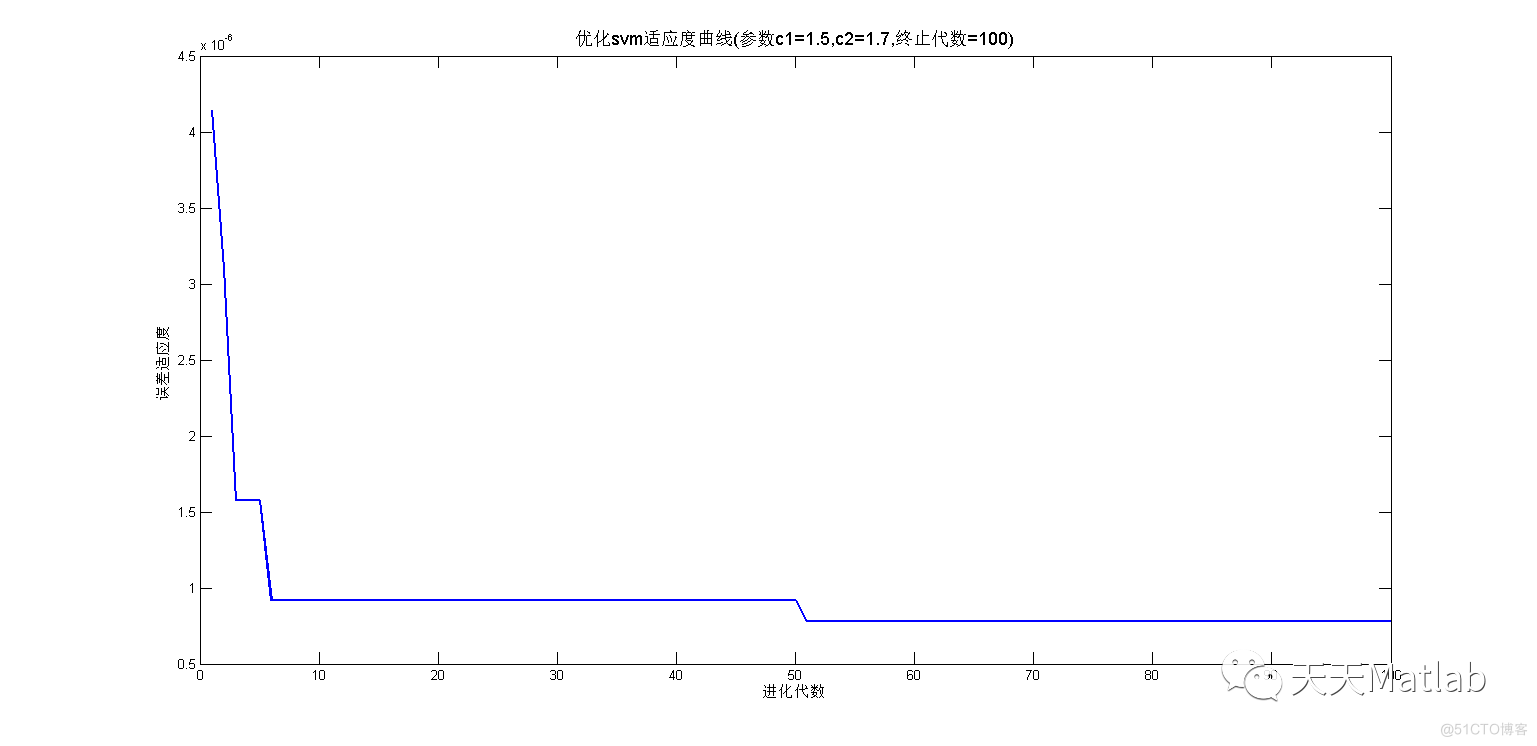
短时交通流预测是实现智能交通控制与管理,交通流状态辨识和实时交通流诱导的前提及关键,也是智能化交通管理的客观需要.到目前为止,它的研究结果都不尽如人意.现有的以精确数学模型为基础的传统预测方法存在计算复杂,运算时间长,需要大量历史数据,预测精度不高等缺点.因此通过研究新型人工智能方法改进短期交通流预测具有一定的现实意义.本文在对现有短期交通流预测模型对比分析及交通流特性研究分析基础上,采用萤火虫算法优化最小二乘支持向量机方法进行短期交通流预测模型,取得较好的效果. 支持向量机是一种新的机器学习算法,建立在统计学习理论的基础上,采用结构风险最小化原则,具有预测能力强,全局最优化以及收敛速度快等特点,相比较以经验风险化为基础的神经网络学习算法有更好的理论依据和更好的泛化性能.对于支持向量机模型而言,其算法相对简单,运算时间短,预测精度较高,比较适用于交通流预测研究,特别是在引入最小二乘理论后,计算简化为求解一个线性方程组,同时精度也能得到保证.,该方法首先利用萤火虫算法算法的全局搜索能力来获取最小二乘支持向量机的惩罚因子和核函数宽度,有效解决了最小二乘支持向量机难以快速精准寻找最优参数的问题.
2 部分代码
%% 清空环境变量clc;
clear;
%% 初始化参数
domx = [-3, 3; -3, 3]; % 定义域
rho = 0.9; % 荧光素挥发因子
gamma = 0.1; % 适应度提取比例
beta = 0.58; % 邻域变化率
nt = 6; % 邻域阀值(邻域萤火虫数)
s = 0.03; % 步长
iot0 = 400; % 荧光素初始浓度
rs = 3; % 感知半径
r0 = 3; % 决策半径
m = size(domx, 1); % 函数空间维数
n = 50; % 萤火虫数量
gaddress = zeros(n, m); % 分配萤火虫地址空间
gvalue = zeros(n, 1); % 分配适应度存放空间
ioti = zeros(n, 1); % 分配荧光素存放空间
rdi = zeros(n, 1); % 分配萤火虫决策半径存放空间
%% 萤火虫常量初始化
% 初始化地址
for i = 1:m
gaddress(:, i) = domx(i, 1)+(domx(i, 2)-domx(i, 1))*rand(n, 1);
end
% 初始化荧光素浓度
ioti(:, 1) = iot0;
% 初始化决策半径
rdi(:, 1) = r0;
iter_max = 500; % 最大迭代次数
t = 1; % 迭代计数器
yy = zeros(iter_max, 1); % 各代最优解
%% 迭代寻优
while t <= iter_max
% 更新荧光素浓度
ioti = (1-rho)*ioti+gamma*fun(gaddress);
% 各萤火虫移动过程开始
for i = 1:n
% 决策半径内找更优点
Nit = []; % 存放萤火虫序号
for j = 1:n
if norm(gaddress(j, :)-gaddress(i, :)) < rdi(i) && ioti(i, 1) < ioti(j, 1)
Nit(numel(Nit)+1) = j;
end
end
% 找下一步移动的点开始
if ~isempty(Nit)
Nitioti = ioti(Nit, 1); % 选出Nit荧光素
SumNitioti = sum(Nitioti); % Nit荧光素和
Molecular = Nitioti-ioti(i, 1); % 分子
Denominator = SumNitioti-ioti(i, 1); % 分母
Pij = Molecular./Denominator; % 计算Nit各元素被选择概率
Pij = cumsum(Pij); % 累计
Pij = Pij./Pij(end); % 归一化
Pos = find(rand < Pij); % 确定位置
j = Nit(Pos(1)); % 确定j的位置
% 萤火虫i向j移动一小步
gaddress(i, :) = gaddress(i, :)+s*(gaddress(j, :)-gaddress(i, :))/norm(gaddress(j, :)-gaddress(i, :));
% 边界处理(限制范围)
gaddress(i, :) = min(gaddress(i, :), domx(1, 2));
gaddress(i, :) = max(gaddress(i, :), domx(1, 1));
% 更新决策半径
rdi(i) = rdi(i)+beta*(nt-length(Nit));
if rdi(i, 1) < 0
rdi(i, 1) = 0;
end
if rdi(i, 1) > rs
rdi(i, 1) = rs;
end
end
3 仿真结果
 编辑
编辑
 编辑
编辑
4 参考文献
[1]刘林. 基于LSSVM的短期交通流预测研究与应用[D]. 西南交通大学, 2011.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。

 编辑
编辑