地震波阻抗反演是在勘探与开发期间进行储层预测的一项关键技术。地震波阻抗反演可消除子波影响,仅留下反射系数,再通过反射系数计算出能表征地层物性变化的物理参数。常用的有道积分、广义线性反演、稀疏脉冲反演、模拟退火反演等技术。
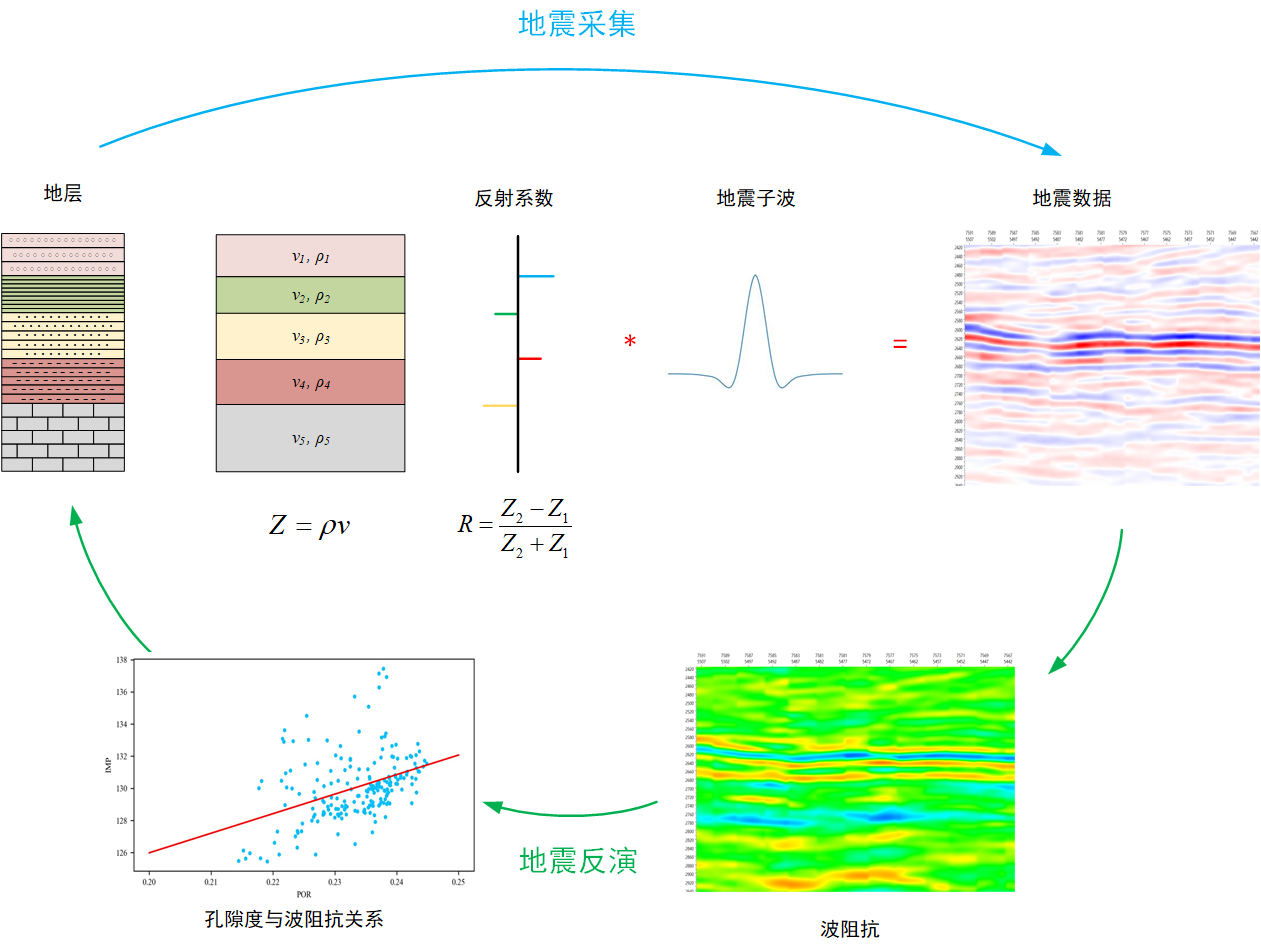
随着勘探与开发的深入,研究的地质目标已经从大套厚层砂体转向薄层砂体,而利用常规波阻抗反演方法刻画薄层砂体不仅要消耗大量人力、物力,且反演得到的波阻抗精度也难以满足实际需求。近年来,深度学习在地震反演和解释等地震领域显现出了巨大的潜力,其中,卷积神经网络(Convolution Neural Networks,CNN)是解决地震反演的一大有力工具。本文将介绍如何搭建CNN网络进行波阻抗反演。
2 Python环境配置我们将使用Python语言以及Pytorch深度学习框架完成实验,因此首先需要配置Python环境。
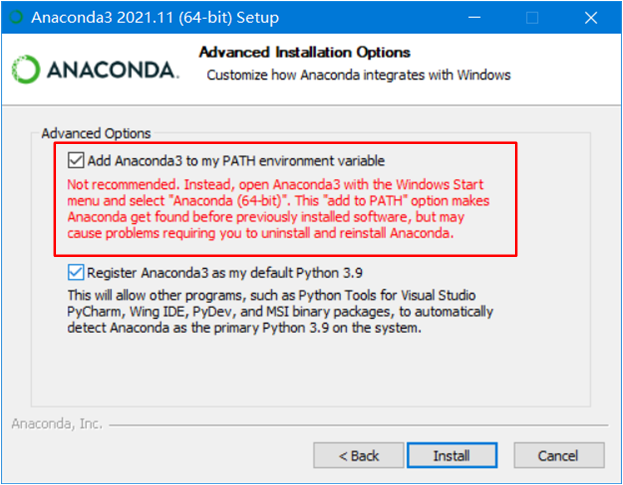
(1)安装Anaconda下载地址Anaconda | The World's Most Popular Data Science Platform
Anaconda是一个开源的Python和R语言的发行版本,用于计算科学(数据科学、机器学习、大数据处理和预测分析),致力于简化软件包管理系统和部署。
安装过程“下一步、下一步”,在这一步时,勾选添加Anaconda到环境变量(注意:在环境变量中有QT、R语言等时,须在“编辑环境变量”中手动将Anaconda路径下移,防止变量、路径被覆盖)
(tips:Python和Anaconda都有蟒蛇的意思)
选择Anaconda主要有几个原因:
- Anaconda的包使用软件包管理系统Conda进行管理,提供了conda install xxx命令,与pip install xxx功能相同。当pip安装库出现一些未知错误时,Conda可以作为补充,省去非必要的报错纠结;
- Anaconda整合了本机中的Python环境与Python包路径,并且提供虚拟环境管理,使得不同Python版本(Python2.x,Python3.x)、CPU/GPU版第三方库可以并列共存。避免了在今后使用中出现版本、路径、环境混乱的问题;
- 下载安装Anaconda可以一键获取新手套装,无需从Python官网从零开始。
随Anaconda一同下载的有
-
Anaconda Navigator:是包含在Anaconda中的图形用户界面,用户可以通过Anaconda Navigator启动应用,在不使用命令行的情况下管理软件包、创建虚拟环境和管理路径。
-
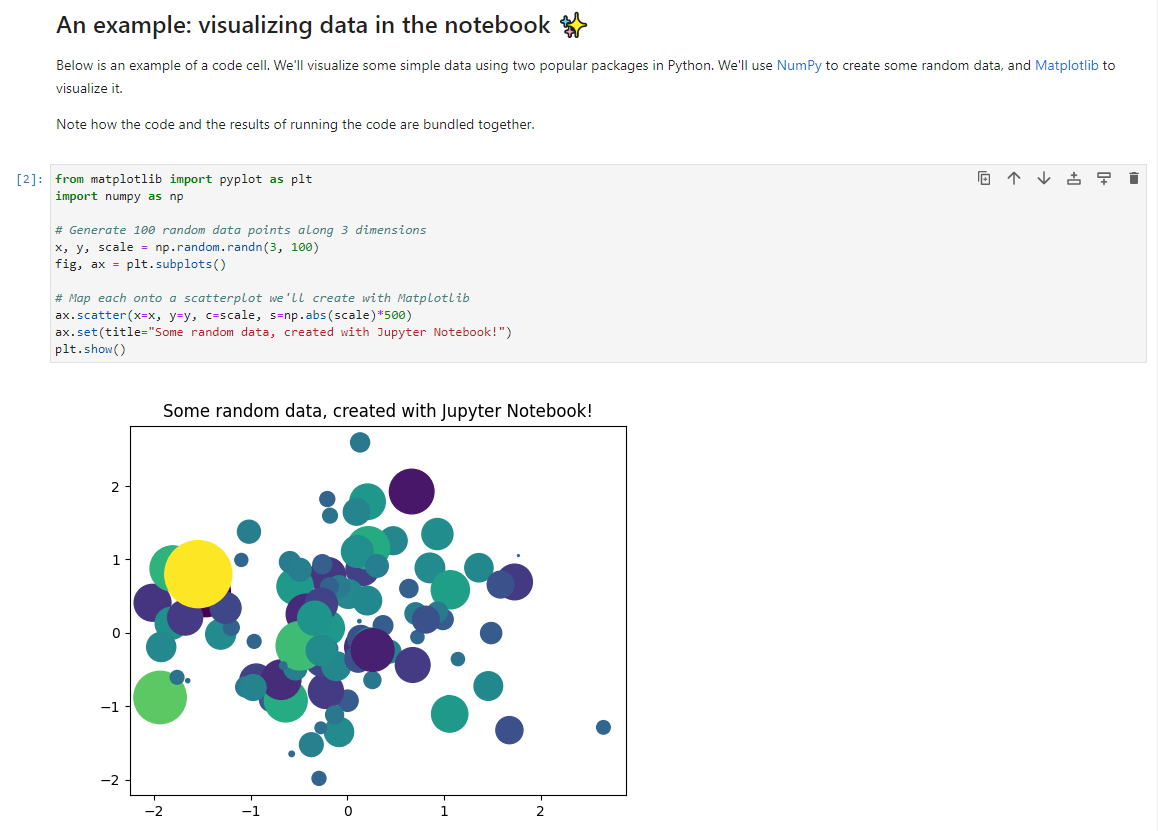
Jupyter Notebook:是一个基于Web的交互式计算环境,用于创建Jupyter Notebook文档。这类文档是一个JSON文档,包含一个有序的输入/输出单元格列表,这些单元格可以包含代码、文本(使用Markdown语言)、数学、图表和富媒体 (Rich media),通常以“.ipynb”结尾扩展。Jupyter Notebook的最大的优点就是可以“做一步看一步”,对于初学和开荒Python项目时,可以更简单、高效地编程。
-
Spyder,是一个开源、免费的Python集成开发环境(IDE)。其最大优点是模仿MATLAB的“工作空间”的功能,便于观察变量的值、维度、类型等信息。
-
Anaconda Prompt:等同Window PowerShell和cmd。
下载地址Download PyCharm: Python IDE for Professional Developers by JetBrains
由捷克JetBrains公司专为Python打造,PyCharm具备一般IDE的功能,比如,调试、语法高亮、Project管理、代码跳转、智能提示、自动完成、单元测试、版本控制等等。PyCharm是商业软件,与Visual Stidio类似,有收费的专业版(Professional)和免费的社区版(Community),社区版能够满足一般编程需要,专业版集成了Jupyter Notebook并且支持远程开发。
下载Community版后,安装过程除了调整路径外,没有需要操作的地方,非必须的可选项都不打勾,然后“下一步下一步”。
安装完成后来到新建工程,以及配置Python环境的环节:

第一次创建工程、加载环境需要等上几分钟,读条完成后,这个工程的Python环境及编辑器就配置完成了。
3 Pytorch实战首先我们需要在本地安装Pytorch,打开Anaconda Prompt或Window PowerShell或cmd,安装指令为
pip install torch torchvision torchaudio
或者
conda install pytorch torchvision torchaudio cpuonly -c pytorch
即可安装CPU版Pytorch(GPU版的安装稍复杂,此处不作详细介绍),随后开始本次项目的实战部分。
(1)数据准备Step 1 导入数据
导入的数据包括地震记录,此处的数据已经被整理存储为.mat格式,通过scipy.io库将其读入。地震道与波阻抗数据都是文件中的键值对,从原始数据中抽取出部分作为实验数据集。
dataframe = sio.loadmat('Train_DataSyn_Ricker30.mat')
#从文件中分别提取提取地震道与波阻抗数据
Seismic_data = dataframe['Seismic'] #地震道
Impedance_data = dataframe['Imp']/1e6 #波阻抗
#随机抽取部分道,作为训练集
howMany = 2020
np.random.seed(9) #随机种子,便于复现
indxRand = [randint(0,dataframe['Seismic'].shape[1]-1) for p in range(0,howMany)] #随机索引
#地震道
Seismic_data = Seismic_data.transpose() #转置
Seismic_data = Seismic_data[indxRand,:] #通过索引抽取
#波阻抗
Impedance_data = Impedance_data.transpose()
Impedance_data = Impedance_data[indxRand,:]
数据展示如下:
我们的目标即是通过建立CNN模型挖掘规律,建立地震振幅属性\(\Longrightarrow\)波阻抗的映射,在未知波阻抗的地方可用地震记录进行预测,实现波阻抗反演。
Step 2 分割数据集
通常一个机器学习项目会需要我们对数据集进行分割,划分为训练集(建模)、验证集(调整超参数与初步评估)和测试集(评估模型)。
#其中验证集500个,测试集1000个,剩余(520)为训练集
howManyToValidate = 500
howManyToTest = 1000
#对输入Seismic与标签Imp进行相同的索引与处理
#用numpy索引切片的方式进行划分
valX = (Seismic_data[:howManyToValidate,:])
testX = (Seismic_data[howManyToValidate:howManyToValidate+howManyToTest,:])
trainX = (Seismic_data[howManyToValidate+howManyToTest:,:])
valImp = (Impedance_data[:howManyToValidate,:])
testImp = (Impedance_data[howManyToValidate:howManyToValidate+howManyToTest,:])
trainImp = (Impedance_data[howManyToValidate+howManyToTest:,:])
#转为torch中的Tensor格式
#此时数据为(道数,采样点数)的二维数组,按照torch的输入格式整理为(道数,数据高度,数据长度),便于后续输入道CNN网络中
valX = torch.FloatTensor(np.reshape(valX, (valX.shape[0], 1, valX.shape[1])))
testX = torch.FloatTensor(np.reshape(testX, (testX.shape[0], 1, testX.shape[1])))
trainX = torch.FloatTensor(np.reshape(trainX, (trainX.shape[0], 1, trainX.shape[1])))
valImp = torch.FloatTensor(np.reshape(valImp, (valImp.shape[0], 1, valImp.shape[1])))
testImp = torch.FloatTensor(np.reshape(testImp, (testImp.shape[0], 1, testImp.shape[1])))
trainImp = torch.FloatTensor(np.reshape(trainImp, (trainImp.shape[0], 1, trainImp.shape[1])))
Step 1 建立网络
采用一维卷积神经网络(1D CNN)进行波阻抗的生成与预测,具体步骤与结构如下图。
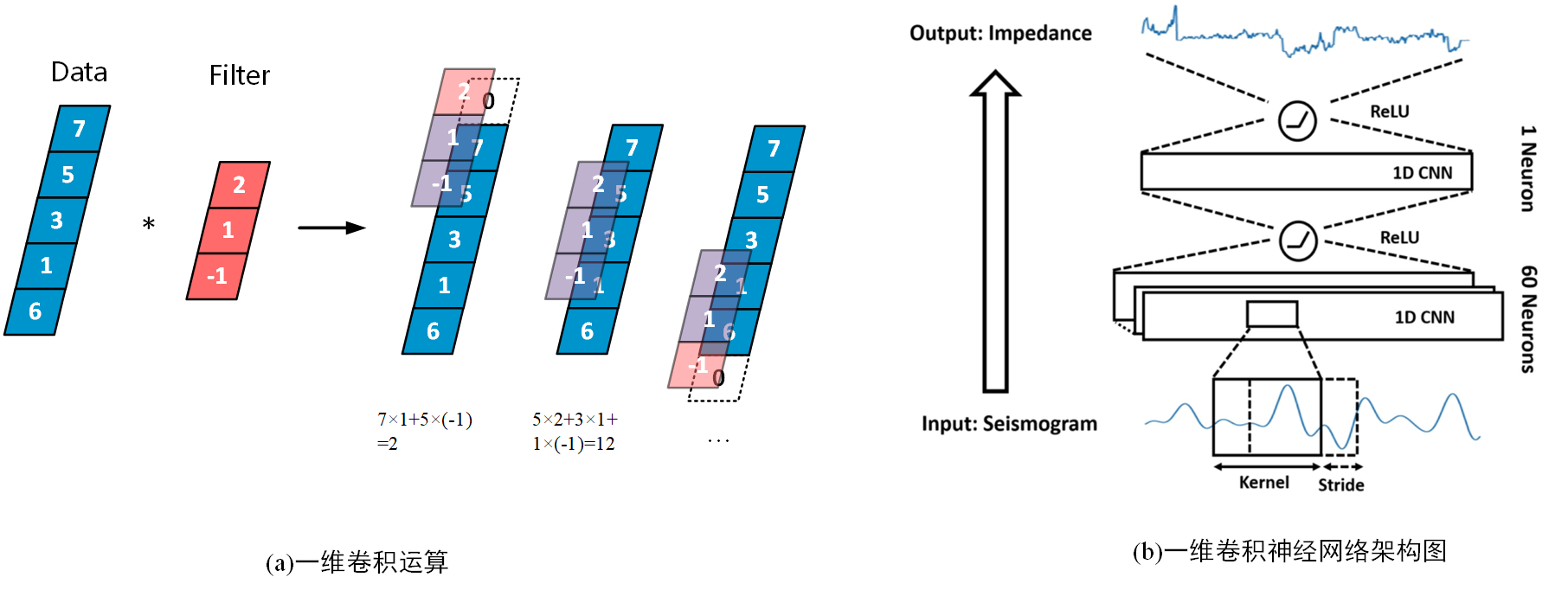
创建神经网络通常也就是创建一个继承自torch.nn.Module的类,而将网络层及其连接定义在类中的方法中
noOfNeurons = 60 #定义卷积核个数
dilation = 1
kernel_size = 300 #卷积核尺寸
stride = 1 #卷积核滑动步长
padding = int(((dilation*(kernel_size-1)-1)/stride-1)/2) #0填充个数
class CNN(nn.Module):
def __init__(self): #构造函数
super(CNN, self).__init__() #前面三行为固定格式
self.layer1 = nn.Sequential( #nn.Sequential为一个顺序的容器
#Conv1d的前两个参数分别表示输入通道数与输出通道数,又有卷积核个数=卷积层输出通道数
nn.Conv1d(1, noOfNeurons, kernel_size=kernel_size, stride=1, padding = padding+1),#卷积层
nn.ReLU()) #ReLu激活函数
self.layer2 = nn.Sequential(
nn.Conv1d(noOfNeurons, 1, kernel_size=kernel_size, stride=1, padding = padding+2),
nn.ReLU())
def forward(self, x): #在forward中将网络像搭积木一样连接起来
out = self.layer1(x)
out = self.layer2(out)
return out
cnn = CNN() #实例对象
注:①在PyTorch中,可以把神经网络类中forward函数看作一个专用函数,它专门用于编写前向传播的计算方法,并且已经写在了nn.Module的“出厂设置”中,在传入数据时便会开始执行,如上例中,使用cnn(x)本质上等于cnn.forward(x),显式使用后者反而报错。
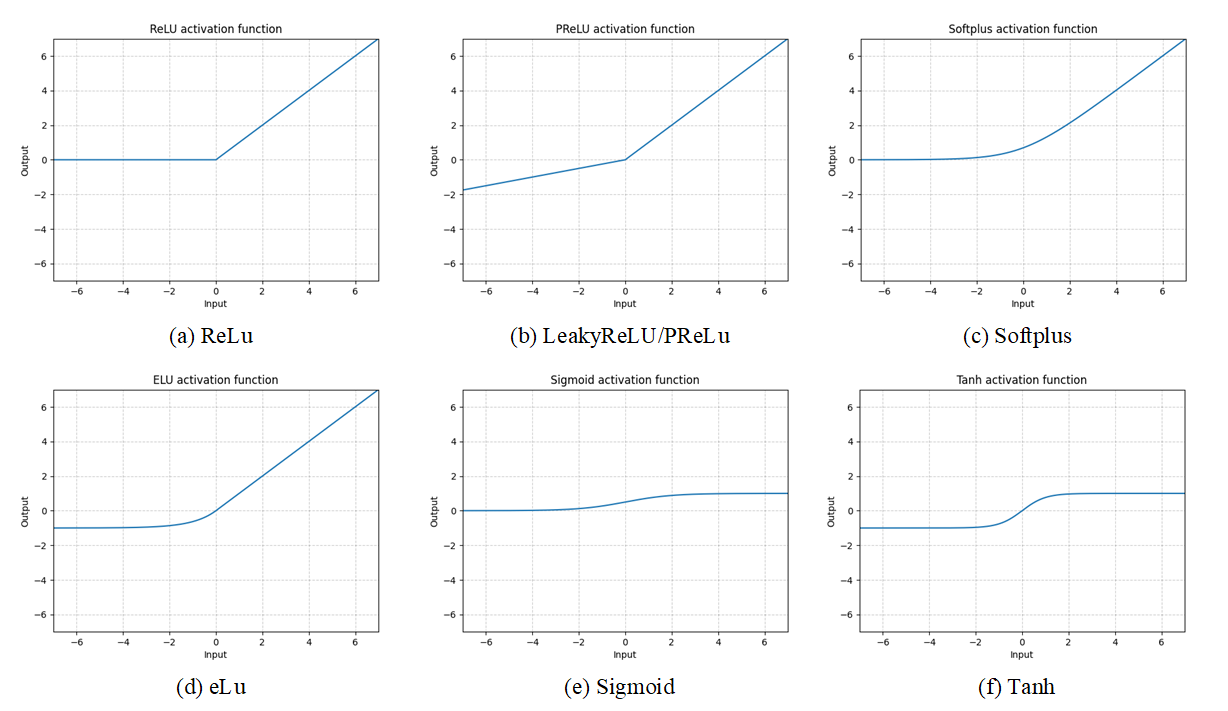
②关于激活函数
激活函数给神经元引入了非线性因素,使得神经网络可以任意逼近任何非线性函数,能够完成极其复杂的分类或回归任务。若没有激活函数,则每层就相当于矩阵乘法。
Sigmoid——nn.Sigmoid()
\(\text{Sigmoid}(x) = \sigma(x) = \frac{1}{1 + \exp(-x)}\)
优点:
能够将函数压缩至区间[0,1]之间,保证数据稳定,波动幅度小
缺点:
- 函数在两端的饱和区梯度趋近于0,当反向传播时容易出现梯度消失或梯度爆炸
- 输出不是0均值(zero-centered),导致收敛缓慢
- 运算量较大
如果我们在多个层中堆叠sigmoid,则系统学习效率可能低下,并且需要仔细初始化。因此,对于深度神经网络,首选ReLU函数。
ReLU(Rectified Linear Unit,修正线性单元)——nn.ReLU()
\(\text{ReLU}(x) = (x)^{+} = \max(0,x)\)
优点:
- 梯度不饱和,收敛速度快
- 减轻反向传播时梯度弥散的问题
- 无需进行指数运算,运算速度快、复杂度低
缺点:
- 输出不是0均值(zero-centered)
- 对参数初始化和学习率非常敏感,容易出现神经元死亡。
常用的激活函数还有许多:
Step 2 定义训练参数
#定义与训练有关的超参数
num_epochs = 500 #迭代轮数
batch_size = 1 #批次大小
learning_rate = 0.001 #学习率
batch_size_tot = trainX.shape[0]
no_of_batches = int((batch_size_tot - batch_size_tot%batch_size)/batch_size) #总批数
loss_fn = nn.MSELoss() #损失函数,此处为一个回归任务,采用均方根误差作为损失值
optimizer = torch.optim.Adam(cnn.parameters(), lr=learning_rate) #优化器选择为Adam
注:①pytorch中的nn模块提供了很多可以直接使用的loss函数,常用的有:
②使用Loss函数会对每个样本计算其损失,然后开始梯度下降去降低损失\(w+=-\alpha dx\),最基础的是一次优化输入一个样本的随机梯度下降(Stochastic gradient descent,SGD),或是一个小批次(Mini-batch)。除此之外还有很多种不同的优化器,torch.optim是一个实现了各种优化算法的库。它们采取不同的策略更新梯度,比初始的梯度下降更加高效:
(Momentum=0.9...) Momentum算法 \(m=b_1*m-\alpha dx\)
\(w=w+m\) torch.optim.AdaGrad AdaGrad算法 \(v=v+dx^2\)
\(w=w-\alpha *\frac{dx}{\sqrt v }\) torch.optim.RMSProp RMSprop算法
(Root Mean Square Prop) Momentum+AdaGrad
\(v=b_1*v+(1-b_1)*dx^2\)
\(w=w-\alpha *\frac{dx}{\sqrt v }\) torch.optim.Adam Adam算法
(Adaptive momentum) \(m=b_1*m+(1-b_1)*dx\)
\(v=b_2*v+(1-b_2)*dx^2\)
\(w=w-\alpha *\frac{m}{\sqrt v }\)
Step3 训练
for epoch in range(num_epochs): #开始迭代
for i in range(no_of_batches):
#地震道数据
#通过手动索引的方式建立batch
#使用Variable对Tensor进行封装,便于改变Tensor的.data、.grad、.grad_fn属性
traces = Variable(trainX[i*batch_size:(i+1)*batch_size,:,:])
imp_label = Variable(trainImp[i*batch_size:(i+1)*batch_size,:,:])
'''以下5行代码为固定格式,几乎所有pytorch网络都是同样的'''
outputs = cnn(traces) #将训练数据输入道cnn模型中,前向传播
loss = loss_fn(outputs, imp_label) #计算损失
optimizer.zero_grad() #每一批次计算完成后梯度清零
loss.backward() #反向传播
optimizer.step() #梯度更新
#然后在每一批次训练完成后,用交叉验证集检验
traces_val = Variable(valX)
outputs_val = cnn(traces_val)
imp_val = Variable(valImp)
loss_val = loss_fn(outputs_val, imp_val)
#打印
print ('Epoch [%d/%d], Iter [%d], Train Loss: %.6f, Validation Loss: %.6f'
%(epoch+1, num_epochs, i+1, loss.data.cpu().numpy(), loss_val.data.cpu().numpy()))
输出如下:
Epoch [1/500], Iter [1400], Train Loss: 0.357334, Train Loss: 0.099698, Validation Loss: 0.489520, Validation Loss: 0.121744
Epoch [2/500], Iter [1400], Train Loss: 0.279390, Train Loss: 0.088157, Validation Loss: 0.453510, Validation Loss: 0.117180
Epoch [3/500], Iter [1400], Train Loss: 0.249917, Train Loss: 0.083377, Validation Loss: 0.435483, Validation Loss: 0.114828
Epoch [4/500], Iter [1400], Train Loss: 0.277595, Train Loss: 0.087873, Validation Loss: 0.431772, Validation Loss: 0.114337
...
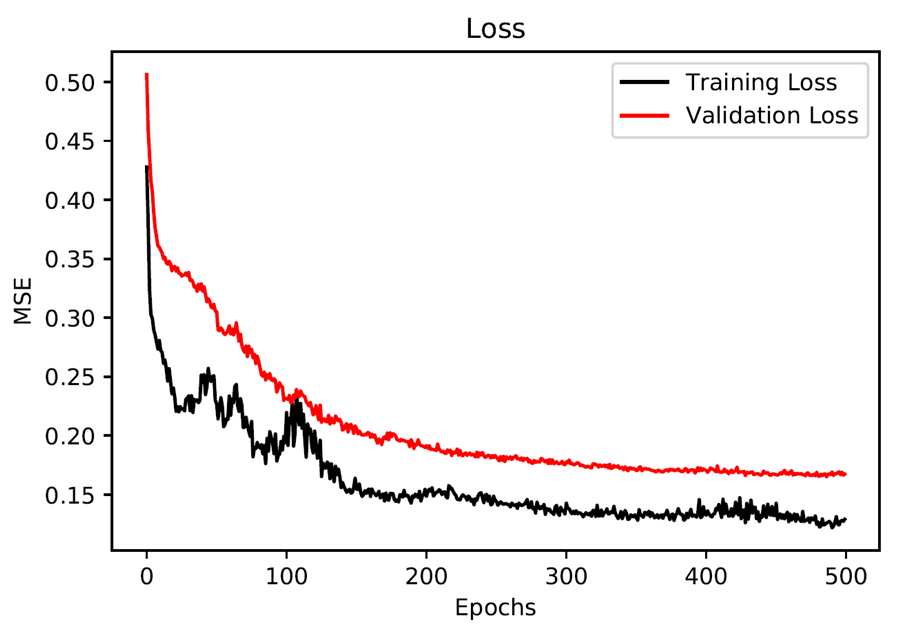
模型的损失值曲线图如下:
 (3)预测
(3)预测
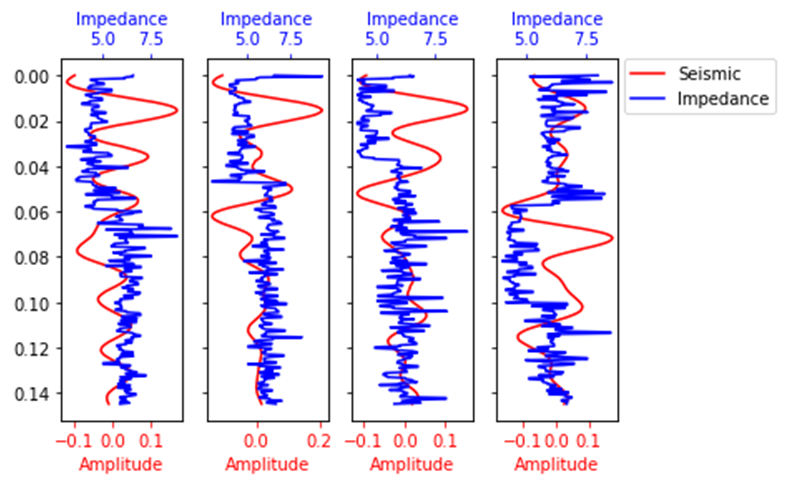
Step 1 预测测试集
通常测试集也是有标签的,我们能够直观地对比模型的预测效果与精度。
#抽取出待测的地震道
sampleNumber = 25
TestingSetSeismicTrace = Variable(testX[sampleNumber:sampleNumber+1,:,:]) #输入数据
CNN_ImpedancePrediction = cnn(TestingSetSeismicTrace) #预测结果
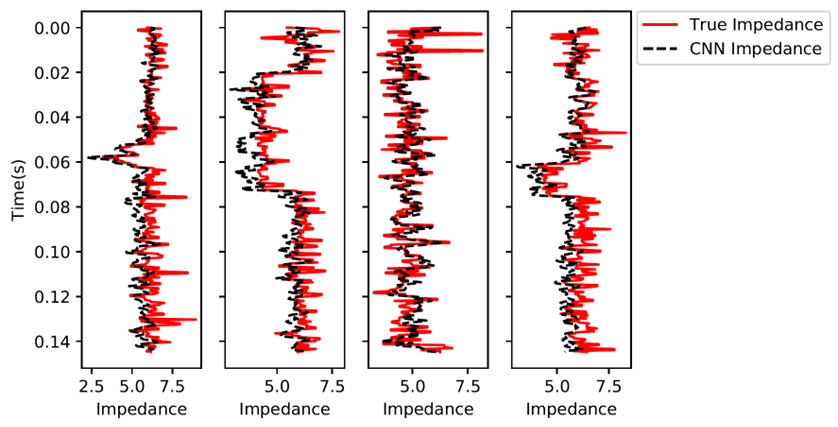
图中展示了4道的真实波阻抗与CNN预测波阻抗:
Step 2 保存&加载模型
训练一次模型往往需要花费很长时间,将模型保存下来,在需要的时候载入,避免关闭程序后再重新训练。
#保存模型
with open('cnn.pkl', 'wb') as pickle_file:
torch.save(cnn.state_dict(), pickle_file)
#加载模型
#加载时需要先实例化对象
cnn_new = CNN()
with open('cnn.pkl', 'rb') as pickle_file:
cnn_new.load_state_dict(torch.load(pickle_file))
Step 3 应用
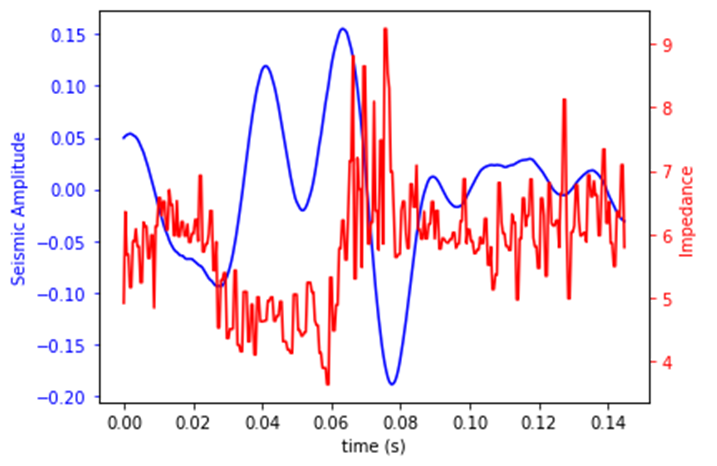
应用时往往没有标签(波阻抗),需要模型由已知数据预测未知。
dataframe = sio.loadmat('HardTest_DataSyn_Ricker30.mat')
TestingSeismic = dataframe['wz_with_multiples']
TestingSeismic = TestingSeismic.transpose()[:, 0:333]
TestingImpedance = dataframe['IpTimeVec']/1e6
TestingImpedance = TestingImpedance.transpose()[:, 0:333]
print(TestingImpedance.shape[1])
sampleNumber = 25
#抽取应用数据的地震道
AppSeismicTrace = AppSeismic[sampleNumber,:]
#Numpy.array-->Tensor-->Variable
AppSeismicTraceTorch = torch.FloatTensor(np.reshape(AppSeismicTrace, (1,1, AppSeismicTrace.shape[0]))) #输入尺寸与训练集保持一致,第一个1表示应用当前单个样本
AppSeismicTraceTorch = Variable(AppSeismicTraceTorch) #封装成Variable
#用加载的cnn_new模型去预测
CNN_ImpedancePrediction = cnn_new(AppSeismicTraceTorch)
 于是,我们便完成了,通过建立神经网络模型,从地震记录反演波阻抗的整个过程。
完整代码
于是,我们便完成了,通过建立神经网络模型,从地震记录反演波阻抗的整个过程。
完整代码
import torch.nn as nn
import torch.autograd
from torch.autograd import Variable
import scipy.io as sio
import matplotlib.pyplot as plt
%matplotlib inline
%config InlineBackend.figure_format = 'svg'
import numpy as np
from random import randint
#******************导入数据*********************
dataframe = sio.loadmat('Train_DataSyn_Ricker30.mat')
#从文件中分别提取提取地震道与波阻抗数据
Seismic_data = dataframe['Seismic'] #地震道
Impedance_data = dataframe['Impedance']/1e6 #波阻抗
#随机抽取部分道,作为训练集
howMany = 2020
np.random.seed(9) #随机种子,便于复现
indxRand = [randint(0,dataframe['Seismic'].shape[1]-1) for p in range(0,howMany)] #随机索引
#地震道
Seismic_data = Seismic_data.transpose() #转置
Seismic_data = Seismic_data[indxRand,:] #通过索引抽取
#波阻抗
Impedance_data = Impedance_data.transpose()
Impedance_data = Impedance_data[indxRand,:]
dt = 4.3875e-4
time = np.linspace(0,(Seismic_data.shape[1]-1)*dt,Seismic_data.shape[1])
#*********************分割数据集****************************
#其中验证集500个,测试集1000个,剩余(520)为训练集
howManyToValidate = 500
howManyToTest = 1000
#对输入Seismic与标签Imp进行相同的索引与处理
#用numpy索引切片的方式进行划分
valX = (Seismic_data[:howManyToValidate,:])
testX = (Seismic_data[howManyToValidate:howManyToValidate+howManyToTest,:])
trainX = (Seismic_data[howManyToValidate+howManyToTest:,:])
valImp = (Impedance_data[:howManyToValidate,:])
testImp = (Impedance_data[howManyToValidate:howManyToValidate+howManyToTest,:])
trainImp = (Impedance_data[howManyToValidate+howManyToTest:,:])
#转为torch中的Tensor格式
#此时数据为(道数,采样点数)的二维数组,按照torch的输入格式整理为(道数,数据高度,数据长度),便于后续输入道CNN网络中
valX = torch.FloatTensor(np.reshape(valX, (valX.shape[0], 1, valX.shape[1])))
testX = torch.FloatTensor(np.reshape(testX, (testX.shape[0], 1, testX.shape[1])))
trainX = torch.FloatTensor(np.reshape(trainX, (trainX.shape[0], 1, trainX.shape[1])))
valImp = torch.FloatTensor(np.reshape(valImp, (valImp.shape[0], 1, valImp.shape[1])))
testImp = torch.FloatTensor(np.reshape(testImp, (testImp.shape[0], 1, testImp.shape[1])))
trainImp = torch.FloatTensor(np.reshape(trainImp, (trainImp.shape[0], 1, trainImp.shape[1])))
#********************建模*********************
noOfNeurons = 60 #定义卷积核个数
dilation = 1
kernel_size = 300 #卷积核尺寸
stride = 1 #卷积核滑动步长
padding = int(((dilation*(kernel_size-1)-1)/stride-1)/2) #0填充个数
class CNN(nn.Module):
def __init__(self): #构造函数
super(CNN, self).__init__() #前面三行为固定格式
self.layer1 = nn.Sequential( #nn.Sequential为一个顺序的容器
#Conv1d的前两个参数分别表示输入通道数与输出通道数,又有卷积核个数=卷积层输出通道数
nn.Conv1d(1, noOfNeurons, kernel_size=kernel_size, stride=1, padding = padding+1),#卷积层
nn.ReLU()) #ReLu激活函数
self.layer2 = nn.Sequential(
nn.Conv1d(noOfNeurons, 1, kernel_size=kernel_size, stride=1, padding = padding+2),
nn.ReLU())
def forward(self, x): #在forward中将网络像搭积木一样连接起来
out = self.layer1(x)
out = self.layer2(out)
return out
cnn = CNN() #实例对象
#*************************训练************************
#定义与训练有关的超参数
num_epochs = 500 #迭代轮数
batch_size = 1 #批次大小
learning_rate = 0.001 #学习率
batch_size_tot = trainX.shape[0]
no_of_batches = int((batch_size_tot - batch_size_tot%batch_size)/batch_size) #总批数
loss_fn = nn.MSELoss() #损失函数,此处为一个回归任务,采用均方根误差作为损失值
optimizer = torch.optim.Adam(cnn.parameters(), lr=learning_rate) #优化器选择为Adam
for epoch in range(num_epochs): #开始迭代
for ii in range(no_of_batches):
#地震道数据
#通过手动索引的方式建立batch
#使用Variable对Tensor进行封装,便于改变Tensor的.data、.grad、.grad_fn属性
traces = Variable(trainX[ii*batch_size:(ii+1)*batch_size,:,:])
imp_label = Variable(trainImp[ii*batch_size:(ii+1)*batch_size,:,:])
'''以下5行代码为固定格式,几乎所有pytorch网络都是同样的'''
outputs = cnn(traces) #将训练数据输入道cnn模型中,前向传播
loss = loss_fn(outputs, imp_label) #计算损失
optimizer.zero_grad() #每一批次计算完成后梯度清零
loss.backward() #反向传播
optimizer.step() #梯度更新
#然后在每一批次训练完成后,用交叉验证集检验
traces_val = Variable(valX)
outputs_val = cnn(traces_val)
imp_val = Variable(valImp)
loss_val = loss_fn(outputs_val, imp_val)
#打印
print ('Epoch [%d/%d], Iter [%d], Train Loss: %.6f, Validation Loss: %.6f'
%(epoch+1, num_epochs, ii+1, loss.data.cpu().numpy(), loss_val.data.cpu().numpy()))
#**********************测试集可视化对比**************************
#取出4道
sampleNumbers = np.array([21,50,162,206])
fig, axs = plt.subplots(1, 4, sharey=True)
axs[0].invert_yaxis()
fig.suptitle('Samples of Testing Data Predictions')
for i in range(4):
sampleNumber = sampleNumbers[i];
TestingSetSeismicTrace = Variable(testX[sampleNumber:sampleNumber+1,:,:])
CNN_ImpedancePrediction = cnn(TestingSetSeismicTrace)
#Numpy数据作图用
TestingSetSeismicTrace = testX[sampleNumber,:].numpy().flatten()
TestingSetImpedanceTrace = testImp[sampleNumber,:].numpy().flatten()
CNN_ImpedancePrediction = CNN_ImpedancePrediction.data.cpu().numpy().flatten()
line1, = axs[i].plot(TestingSetImpedanceTrace, time, 'r-')
axs[i].set_xlabel('Impedance')
if i==0:
axs[i].set_ylabel('Time(s)')
line2, = axs[i].plot(CNN_ImpedancePrediction, time, 'k--')
lgd = plt.legend((line1, line2), ('True Impedance', 'CNN Impedance'), bbox_to_anchor=(1.05, 1), loc=2, borderaxespad=0.)
#********************模型保存&加载*********************
#保存模型
with open('cnn.pkl', 'wb') as pickle_file:
torch.save(cnn.state_dict(), pickle_file)
#加载模型
#加载时需要先实例化对象
cnn_new = CNN()
with open('cnn.pkl', 'rb') as pickle_file:
cnn_new.load_state_dict(torch.load(pickle_file))
#**********************应用************************
Appdataframe = sio.loadmat('HardTest_DataSyn_Ricker30.mat')
AppSeismic = Appdataframe['Seismic']
AppSeismic = AppSeismic.transpose()
sampleNumber = 25
#抽取应用数据的地震道
AppSeismicTrace = AppSeismic[sampleNumber,:]
#Numpy.array-->Tensor-->Variable
AppSeismicTraceTorch = torch.FloatTensor(np.reshape(AppSeismicTrace, (1,1, AppSeismicTrace.shape[0]))) #输入尺寸与训练集保持一致,第一个1表示应用当前单个样本
AppSeismicTraceTorch = Variable(AppSeismicTraceTorch) #封装成Variable
#用加载的cnn_new模型去预测
CNN_ImpedancePrediction = cnn_new(AppSeismicTraceTorch)
#作图
fig, ax1 = plt.subplots()
ax1.plot(time, AppSeismicTrace, 'b-')
ax1.set_xlabel('time (s)')
ax1.set_ylabel('Seismic Amplitude', color='b')
ax1.tick_params('y', colors='b')
ax2 = ax1.twinx()
ax2.plot(time, CNN_ImpedancePrediction.detach().numpy().flatten(), 'r-')
ax2.set_ylabel('Impedance', color='r')
ax2.tick_params('y', colors='r')
fig.tight_layout()
plt.show()
数据与源码CNN_based_impedance_inversion/Challenge_testing_Facies_variograms at master · vishaldas/CNN_based_impedance_inversion (github.com)
引用文献
[1] Vishal Das;Ahinoam Pollack;Uri Wollner;Tapan Mukerji.Convolutional neural network for seismic impedance inversion[J].Geophysics,2019,Vol.84(6): R869-R880
[2]王治强. 稀疏脉冲反褶积及其波阻抗反演研究[D].中国石油大学(北京),2018.DOI:10.27643/d.cnki.gsybu.2018.001091.
[3] Activation and loss functions (part 1) · Deep Learning (atcold.github.io)
[4] https://www.w3cschool.cn/article/78828381.html