近年来,工业机器人的兴起使得建造的效率和安全性得以提升,但由于机器人由于大小与活动范围的限制,在大型建筑上难以施展拳脚。上海同济大学建筑系的无人机自主建造小组,正在进行以无人机取代工业机器人进行空中建造为目的,进行无人机自主建造系统的研究,系统由无人机空间位姿反馈和地面站轨迹控制两部分组成。该小组先在一定规模的场地中布置适用场景进行无人机飞行,通过无人机空间位姿的获取,设计地面站控制系统,之后便可将装置的尺度扩大到真实建造的尺度,进行建筑建造。
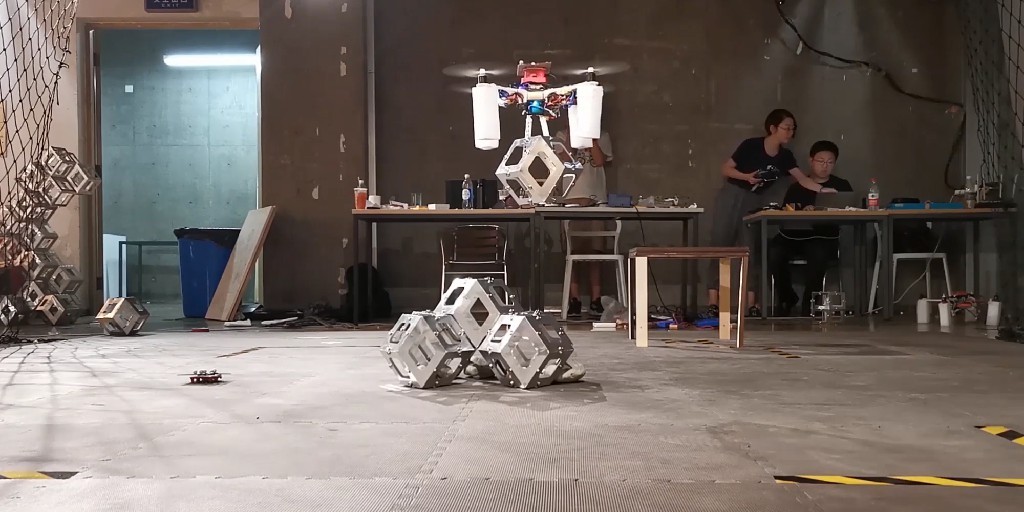
无人机空间位姿的获取,是通过NOKOV度量光学三维动作捕捉系统作为空间定位系统,主要依赖于其精确到亚毫米的高精度捕捉。在层高2.5m,工作区域面积约为5m*6m的环境下,该小组使用了8个动作捕捉镜头组成无人机室内定位系统。动作捕捉镜头通过捕捉固定在无人机上的特制反光标志点,以200Hz的频率记录无人机在空间中的位置信息。获取的数据通过特定算法,得到无人机的六自由度6DoF信息,包括三维空间XYZ坐标,偏航角Yaw,横滚角Roll以及俯仰角Pitch。
无人机定位数据(6DoF数据等)的数据,实时被控制系统中的飞控程序所获取,用自带的传感器数据进行LPE(Local Position Estimate)计算,用于实时更新无人机相对于全局坐标系的位置估计。之后再通过轨迹规划,协调多台无人机执行砌筑、搬运等任务时在多个航点间的移动方式,确保在操作过程中飞行器的安全以及砌筑顺序的正确。
在基于室内动作捕捉系统的无人机自主建造实时控制系统和可视化界面平台上,该小组现已完成了全部由无人机自主完成的搭建试验,向实现空中无人机自主建造的目标更近了一步。希望在将来,动作捕捉技术能够让无人机协同系统在更多的学科、行业发展中实现成本优化与效率提升,发挥巨大作用。
参考文献:[1]郭喆,陆明,王祥.基于无人机的离散结构自主建造技术初探[J].建筑技艺,2019(09):40-45.