SCCB(OmniVision serial camera control bus),即串行摄像机控制总线。OmniVision 公司已经定义和
采纳的SCCB总线是一种三线结构的串行总线,用于完成对绝大多数OmniVision 系列图像传芯片功能的控制。
在简化的引脚封装中,SCCB总线可以工作在改进的两线工作方式下。
两线SCCB接口有两条通迅连接线,即SIO_D(数据线)和 SIO_C(时钟线),下面是双总线功能原理图:

在双总线情况下,要求主控机有以下两种功能之一来支持SCCB通迅:
1、主控器件支持并能保持数据在三态模式;
2、如果不支持三态,
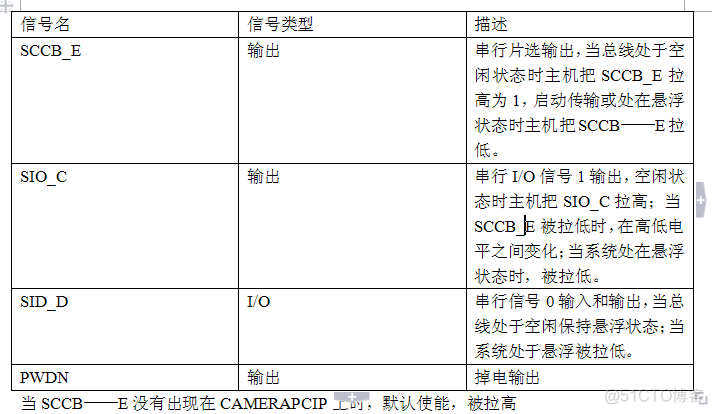
二、管脚功能
主控器件管脚描述
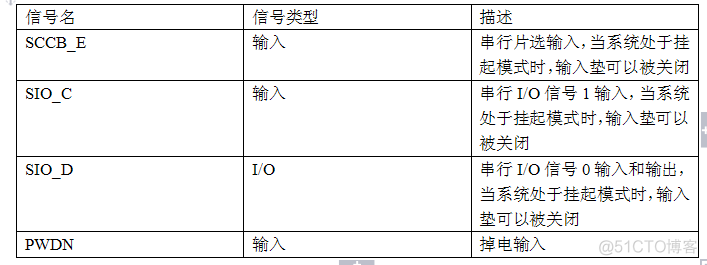
从控器件管脚描述
SCCB——E 信号
低电平有效,一个高到低的转换表明数据传输开始;一个低到高的转换表明数据传输结束;数据传输过程保持为低
电平;高电平表明总线处于空闲状态。在SCCB——E表明数据传输开始之前主机必须将数据线SIO——D置为1,这样可以避免
总线数据传输开始之前的总线不确定状态的出现。
SIO——C 信号
高电平有效,当处于空闲状态时必须被拉高;当启动传输后,SIO——C被拉低表明数据传输的开始,传输过程中高电平
表明一位数据正在传输,所以SIO——D的数据变化只能在SIO——C为低时发生,一位传输时间定义为tCYC,最小为10us。
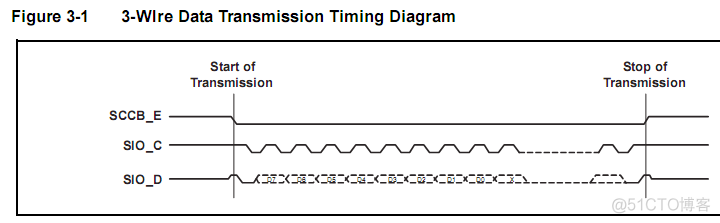
三总线数据传输
SIO——D信号
可以被主机和从机驱动,当总线处于空闲时保持悬浮或三态;
在传输Don‘t-Car()e或NA位时,总线浮动和争用是允许的
SIO——C的一个高电平表明一位数据的传输,SIO——D只能在SIO——C的低电平期间发生变化,但在传输的开始和结束
也有例外,在SCCB——E断言并且SIO——C拉低之前,SIO——D可以被拉低,在SIO——C拉高之前和去断言之前,SIO——D
也可以被拉低。
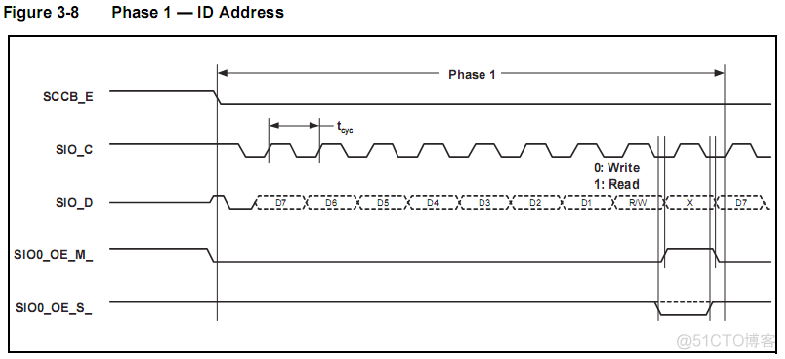
数据传输的起始
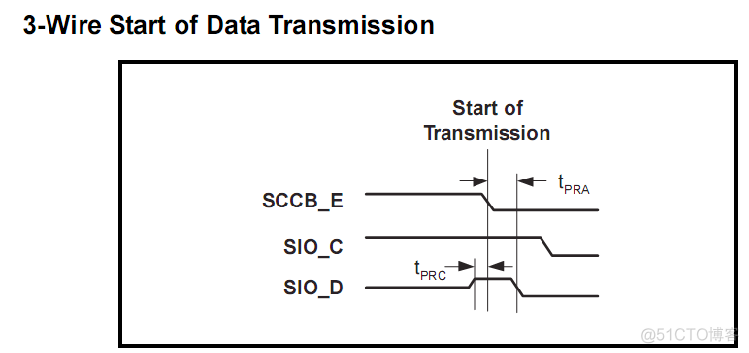
SCCB——E由高到低的变化,表明数据传输的开始,在SCCB——E断言之前,主机必须把SIO——D拉高,这样可以避免
在数据传输之前传输一个不确定的总线状态;在SCCB——E去断言之后,主机必须把SIO——D拉高在一个定义的时间段
内,来再次避免一个不确定状态的总线状态传输。
在启动传输过程中有两个时间参数,TPRA和TPRC,TPRC被定义为SID——D预充电时间,这表明SIO——D必须先于
SCCB——E被拉高的时间,最小值为15ns,TPRA被是指在SIO——D拉低之前,SID——E必须被断言的时间,最小为1.25us。
数据传输的终止
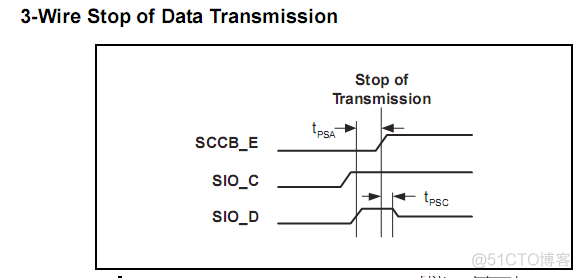
TPSC是SCCB——E去断言后,SIO——D保持逻辑高电平的时间,最小为15ns,TPSA
是SIO——D去断言后,SCCB——E必须保持低电平的时间,最小为0ns。
上面贴的博客源:
因为这个是兼容iic的所以我直接写我再版整理的IIC的思路代码
使用task书写但是下板有问题跑仿真可以,不要模仿
等我研究出来再整理
module I2C_driver(clk,
rst_n,
I2C_wr_data,
I2C_wr_req,
SCL,
SDA,
ACK
);
input clk;
input rst_n;
input [23:0]I2C_wr_data;
input I2C_wr_req;
output reg SCL;
inout SDA;
output ACK;
reg[7:0] temp;
parameter I2C_FREQ =250, //时钟频率
SEND_BIT =8; //发送数据位数
parameter
Init =5'd0,
START =5'd1,
IP_ADDR =5'd2,
ACK_0 =5'd3,
SUB_ADDR =5'd4,
ACK_1 =5'd5,
WR_DATA =5'd6,
ACK_2 =5'd7,
STOP =5'd8,
WAIT =5'd9;
//-------------------------------------------------
reg [7:0]cnt;//scl计数寄存器
reg [2:0]byte_cnt;//数据位寄存器
reg [4:0]state;//状态寄存器
reg sdar;//sda缓存
reg sdarlink; //sdar方向控制器 0-input 1-output
assign SCL_HCapture =(cnt==(I2C_FREQ>>2)&&clk==1'b1);
assign SCL_LCapture =((cnt==(I2C_FREQ>>2)*3)&&clk==1'b1);
assign SDA =sdarlink?sdar:1'bz;
assign ACK =(state==WAIT);
/*---------iic时钟信号产生逻辑----------*/
always@(posedge clk or negedge rst_n)begin
if(rst_n==1'b0)begin
cnt<=1'b0;
end
else if(cnt==I2C_FREQ-1'b1)begin
cnt<=1'b0;
end
else begin
cnt<=cnt+1'b1;
end
end
always @(posedge clk or negedge rst_n)begin
if(rst_n == 1'b0)begin
SCL <= 1'b0;
end
else if(cnt <= (I2C_FREQ>>1)-1'b1)begin
SCL <= 1'b1;
end
else begin
SCL <= 1'b0;
end
end
/*---使能等待---*/
task Wait_Init;
begin
if(I2C_wr_req==1'b1)begin
state<=state+1'b1;
end
else begin
state<=state;
end
end
endtask
/*---起始---*/
task I2C_START;
begin
sdarlink<=1'b1;
if(SCL_HCapture==1'b1)begin
sdar<=1'b0;
byte_cnt<=SEND_BIT-1'b1;
state<=state+1'b1;
end
end
endtask
/*---停止---*/
task I2C_STOP;
begin
if(SCL_LCapture==1'b1)begin
sdarlink<=1'b1;
sdar<=1'b0;
end
else if(SCL_HCapture==1'b1)begin
sdar<=1'b1;
state<=state+1'b1;
end
else begin
sdar<=sdar;
end
end
endtask
/*---应答---*/
task I2C_ANK;
begin
byte_cnt<=SEND_BIT-1'b1;
sdar<=1'bz;
state<=state+1'b1;
end
endtask
/*--非应答--*/
task I2C_NPANK;
begin
byte_cnt<=SEND_BIT-1'b1;
sdar<=1'b0;
state<=state+1'b1;
end
endtask
/*---发送数据or指令---*/
task I2C_Send_Byte;
input [SEND_BIT-1'b1:0]Send_byte;
begin
if(SCL_LCapture==1'b1)begin
sdar<=Send_byte[byte_cnt];
if(byte_cnt!=1'b0)begin
byte_cnt<=byte_cnt-1'b1;
end
else begin
state<=state+1'b1;
end
end
end
endtask
always@(posedge clk or negedge rst_n)begin
if(rst_n==1'b0)begin
sdar<=1'b1;
state<=Init;
end
else begin
case(state)
Init :Wait_Init();
START :I2C_START();
IP_ADDR :I2C_Send_Byte(I2C_wr_data[23:16]);
ACK_0 :I2C_ANK();
SUB_ADDR:I2C_Send_Byte(I2C_wr_data[15:8]);
ACK_1 :I2C_ANK();
WR_DATA :I2C_Send_Byte(I2C_wr_data[7:0]);
ACK_2 :I2C_ANK();
STOP :I2C_STOP();
WAIT :state<=Init;
default:state<=5'bxxxxx;
endcase
end
end
endmodule