本文实例为大家分享了Opencv提取连通区域轮廓的具体代码,供大家参考,具体内容如下 在进行图像分割后,可能需要对感兴趣的目标区域进行提取,比较常用的方法是计算轮廓。 通过
本文实例为大家分享了Opencv提取连通区域轮廓的具体代码,供大家参考,具体内容如下
在进行图像分割后,可能需要对感兴趣的目标区域进行提取,比较常用的方法是计算轮廓。
通过轮廓可以获得目标的一些信息:
(1)目标位置
(2)目标大小(即面积)
(3)目标形状(轮廓矩)
当然,轮廓不一定代表希望目标区域,阈值分割时可能造成一部分信息丢失,因此可以计算轮廓的质心坐标,再进行漫水填充。
程序中有寻找质心+填充,但效果不好,因此就不放填充后的图了。
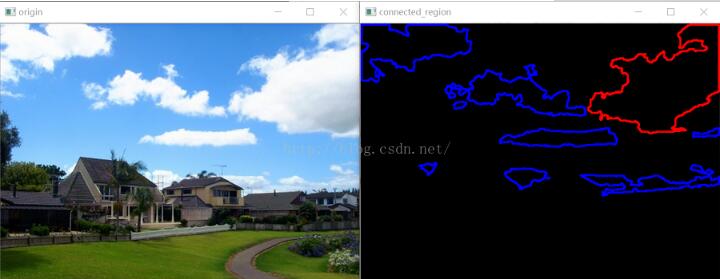
实验结果:
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <stdio.h>
using namespace cv;
using namespace std;
vector<vector<Point> > contours; //轮廓数组
vector<Point2d> centers; //轮廓质心坐标
vector<vector<Point> >::iterator itr; //轮廓迭代器
vector<Point2d>::iterator itrc; //质心坐标迭代器
vector<vector<Point> > con; //当前轮廓
int main()
{
double area;
double minarea = 100;
double maxarea = 0;
Moments mom; // 轮廓矩
Mat image,gray,edge,dst;
namedWindow("origin");
namedWindow("connected_region");
image = imread("view.jpg");
cvtColor(image, gray, COLOR_BGR2GRAY);
blur(gray, edge, Size(3,3)); //模糊去噪
threshold(edge,edge,200,255,THRESH_BINARY); //二值化处理
/*寻找轮廓*/
findContours( edge, contours,
CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE );
itr = contours.begin(); //使用迭代器去除噪声轮廓
while(itr!=contours.end())
{
area = contourArea(*itr);
if(area<minarea)
{
itr = contours.erase(itr); //itr一旦erase,需要重新赋值
}
else
{
itr++;
}
if (area>maxarea)
{
maxarea = area;
}
}
dst = Mat::zeros(image.rows,image.cols,CV_8UC3);
/*绘制连通区域轮廓,计算质心坐标*/
Point2d center;
itr = contours.begin();
while(itr!=contours.end())
{
area = contourArea(*itr);
con.push_back(*itr);
if(area==maxarea)
drawContours(dst,con,-1,Scalar(0,0,255),2); //最大面积红色绘制
else
drawContours(dst,con,-1,Scalar(255,0,0),2); //其它面积蓝色绘制
con.pop_back();
//计算质心
mom = moments(*itr);
center.x = (int)(mom.m10/mom.m00);
center.y = (int)(mom.m01/mom.m00);
centers.push_back(center);
itr++;
}
imshow("origin",image);
imshow("connected_region",dst);
waitKey(0);
/*漫水填充连通区域*/
Point2d seed;
int new_scalar = 0;
int loDiff = 8, upDiff = 8;
int connectivity = 4;
itrc = centers.begin();
while(itrc!=centers.end())
{
seed = *itrc;
floodFill(image,seed,Scalar::all(new_scalar),NULL,
Scalar::all(loDiff),Scalar::all(upDiff),connectivity);
itrc++;
}
waitKey(0);
return 0 ;
}
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持自由互联。