项目描述 : 通过在机器人运动环境中粘贴图像标识,辅助机器人定位,并记录机器人运动关键帧轨迹。 主要贡献 : 解决依靠里程计的 室内 移动 机器人 长时间运动,带来的误差累积
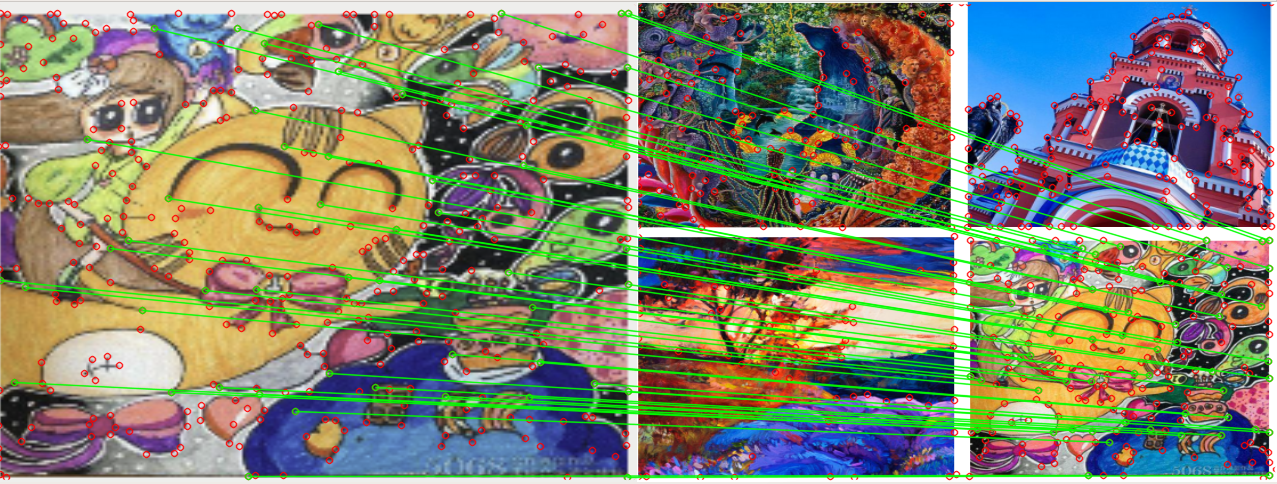
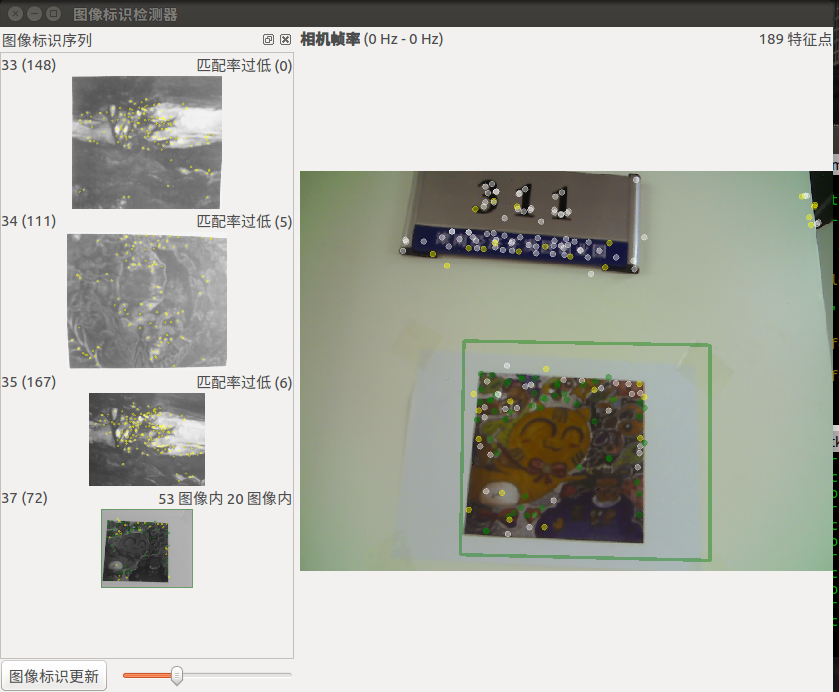
项目描述: 通过在机器人运动环境中粘贴图像标识,辅助机器人定位,并记录机器人运动关键帧轨迹。
主要贡献: 解决依靠里程计的室内移动机器人长时间运动,带来的误差累积、定位不准等问题。
项目描述: 通过在机器人运动环境中粘贴图像标识,辅助机器人定位,并记录机器人运动关键帧轨迹。
主要贡献: 解决依靠里程计的室内移动机器人长时间运动,带来的误差累积、定位不准等问题。