Unity自带陀螺仪功能,今天就利用陀螺仪实现一个VR相机功能。步骤如下: 1、打开Unity,创建一个新的C#脚本GyroController.cs,并挂在MainCamera游戏对象上,如图: 代码如下: using UnityEngine
Unity自带陀螺仪功能,今天就利用陀螺仪实现一个VR相机功能。步骤如下:
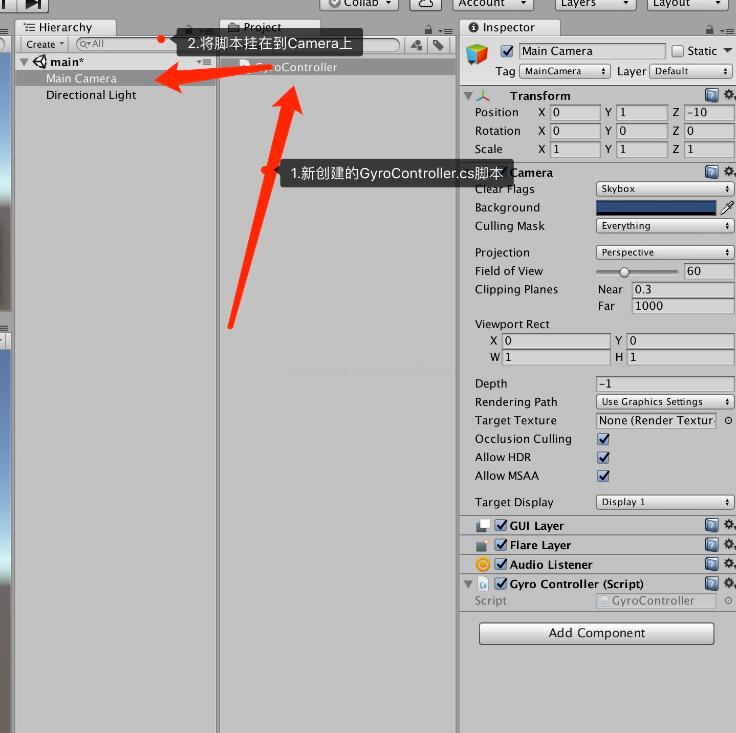
1、打开Unity,创建一个新的C#脚本GyroController.cs,并挂在MainCamera游戏对象上,如图:
代码如下:
using UnityEngine;
using System.Collections;
public class GyroController : MonoBehaviour
{
// Fields
private readonly Quaternion baseIdentity = Quaternion.Euler(90f, 0f, 0f);
private Quaternion baseOrientation = Quaternion.Euler(90f, 0f, 0f);
private Quaternion baseOrientationRotationFix = Quaternion.identity;
private Quaternion calibration = Quaternion.identity;
private Quaternion cameraBase = Quaternion.identity;
private bool debug = true;
public static bool gyroAvaiable;
private bool gyroEnabled = true;
private Quaternion gyroInitialRotation;
public static bool gyroOff;
private Quaternion initialRotation;
private readonly Quaternion landscapeLeft = Quaternion.Euler(0f, 0f, -90f);
private readonly Quaternion landscapeRight = Quaternion.Euler(0f, 0f, 90f);
private const float lowPassFilterFactor = 0.1f;
private Quaternion offsetRotation;
private Quaternion referanceRotation = Quaternion.identity;
private readonly Quaternion upsideDown = Quaternion.Euler(0f, 0f, 180f);
// Methods
private void AttachGyro()
{
this.gyroEnabled = true;
this.ResetBaseOrientation();
this.UpdateCalibration(true);
this.UpdateCameraBaseRotation(true);
this.RecalculateReferenceRotation();
}
private void Awake()
{
gyroAvaiable = SystemInfo.supportsGyroscope;
}
private static Quaternion ConvertRotation(Quaternion q)
{
return new Quaternion(q.x, q.y, -q.z, -q.w);
}
private void DetachGyro()
{
this.gyroEnabled = false;
}
private Quaternion GetRotFix()
{
return Quaternion.identity;
}
private void RecalculateReferenceRotation()
{
this.referanceRotation = Quaternion.Inverse(this.baseOrientation) * Quaternion.Inverse(this.calibration);
}
private void ResetBaseOrientation()
{
this.baseOrientationRotationFix = this.GetRotFix();
this.baseOrientation = this.baseOrientationRotationFix * this.baseIdentity;
}
protected void Start()
{
Input.gyro.enabled = true;
base.enabled = true;
this.AttachGyro();
this.initialRotation = base.transform.localRotation;
this.gyroInitialRotation = Input.gyro.attitude;
}
private void Update()
{
gyroOff = PlayerPrefs.GetInt("gyro-off") == 1;
if (this.gyroEnabled )
{
base.transform.localRotation = Quaternion.Slerp(base.transform.localRotation, this.cameraBase * (ConvertRotation(this.referanceRotation * Input.gyro.attitude) * this.GetRotFix()), 0.5f);//0.1f
}
}
private void UpdateCalibration(bool onlyHorizontal)
{
if (onlyHorizontal)
{
Vector3 toDirection = (Vector3) (Input.gyro.attitude * -Vector3.forward);
toDirection.z = 0f;
if (toDirection == Vector3.zero)
{
this.calibration = Quaternion.identity;
}
else
{
this.calibration = Quaternion.FromToRotation((Vector3) (this.baseOrientationRotationFix * Vector3.up), toDirection);
}
}
else
{
this.calibration = Input.gyro.attitude;
}
}
private void UpdateCameraBaseRotation(bool onlyHorizontal)
{
if (onlyHorizontal)
{
Vector3 forward = base.transform.forward;
forward.y = 0f;
if (forward == Vector3.zero)
{
this.cameraBase = Quaternion.identity;
}
else
{
this.cameraBase = Quaternion.FromToRotation(Vector3.forward, forward);
}
}
else
{
this.cameraBase = base.transform.rotation;
}
}
}
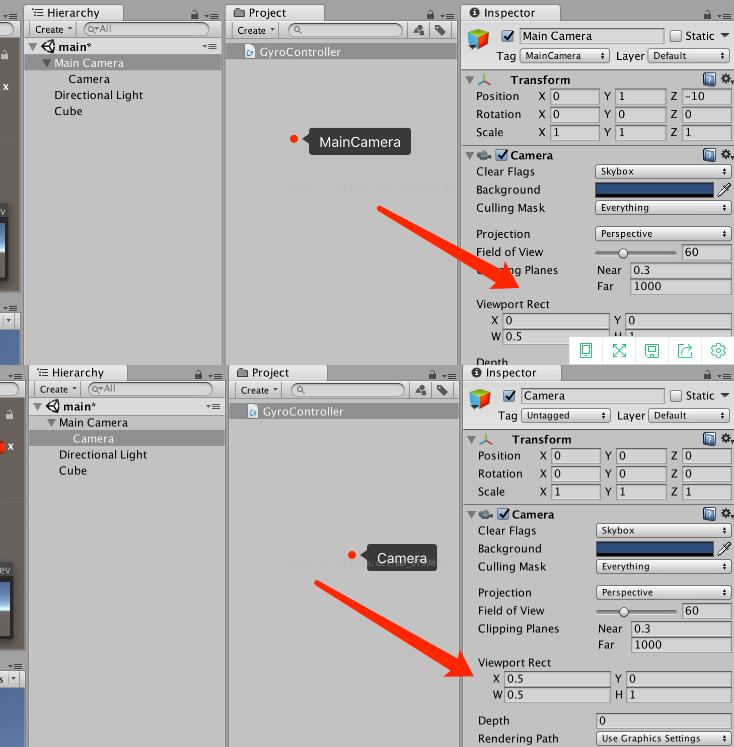
2、在相机MainCamera下创建一个新的Camera相机,并改变两个相机的Viewport Rect属性,以将屏幕均分,如图:
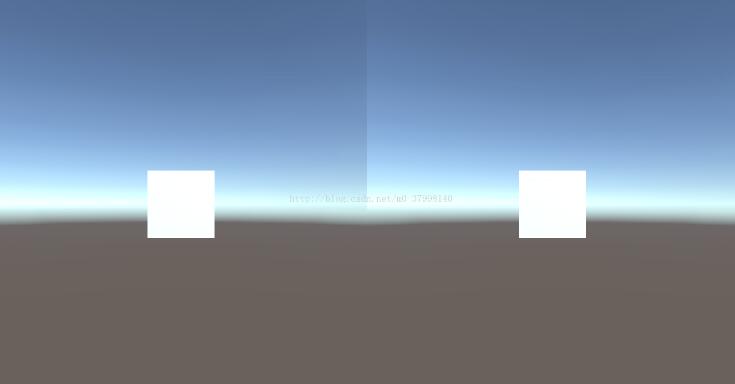
3、在场景中创建一个Cube,效果如图:
4、保存场景,打包成apk即可。即可使用手机陀螺仪控制相机旋转了。
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持易盾网络。