一个有 n 个结点的
(2)性质-
一个连通图可以有多个生成树;
-
一个连通图的所有生成树都包含相同的顶点个数和边数;
-
生成树当中不存在环;
-
移除生成树中的任意一条边都会导致图的不连通, 生成树的边最少特性;
-
在生成树中添加一条边会构成环。
-
对于包含n个顶点的连通图,生成树包含n个顶点和n-1条边;
-
对于包含n个顶点的无向完全图最多包含
颗生成树。
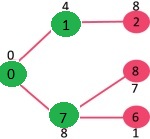
例如:要在n个城市之间铺设光缆,主要目标是要使这 n 个城市的任意两个之间都可以通信,但铺设光缆的费用很高,且各个城市之间铺设光缆的费用不同,因此另一个目标是要使铺设光缆的总费用最低。这就需要找到带权的最小生成树
MST算法之Prim算法参考地址:
Prim算法的流程1) 创建一组 mstSet,用于跟踪 MST 中已包含的顶点。 2) 为输入图中的所有顶点分配一个键值。将所有键值初始化为 INFINITE。为第一个顶点分配键值为 0,以便首先选取它。 3) 虽然 mstSet 不包括所有顶点 ....a) 选择一个在 mstSet 中不存在且具有最小键值的顶点 u。 ....b) 将 u 包含在 mstSet 中。 ....c) 更新 u 的所有相邻顶点的键值。要更新键值,请循环访问所有相邻的顶点。对于每个相邻的顶点 v,如果边 u-v 的权重小于 v 的前一个键值,则将键值更新为 u-v 的权重使用键值的想法是从
让我们通过以下示例来理解:
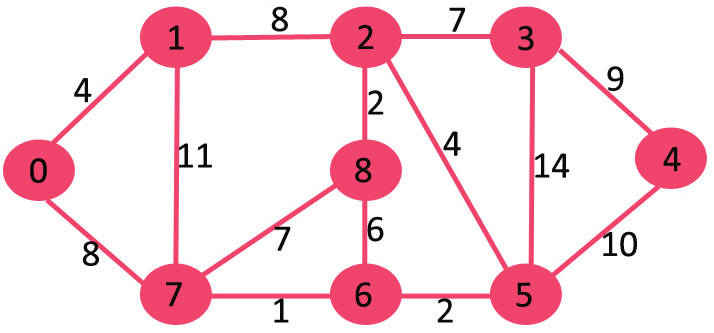
设置的 mstSet 最初是空的,分配给顶点的键是 {0, INF, INF, INF, INF, INF, INF, INF},其中 INF 表示无限。现在选取具有最小键值的顶点。选取顶点 0,将其包含在 mstSet 中。因此,mstSet 变得{0}。包含到 mstSet 后,更新相邻顶点的键值。相邻顶点 0 为 1 和 7。1 和 7 的键值将更新为 4 和 8。下图显示顶点及其键值,仅显示具有有限键值的顶点。MST 中包含的顶点以绿色显示。
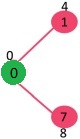
选取具有最小键值且尚未包含在 MST 中(不在 mstSET 中)的顶点。选取顶点 1 并将其添加到 mstSet。所以 mstSet 现在变成 {0, 1}。更新相邻顶点 1 的键值。顶点 2 的键值变为 8。
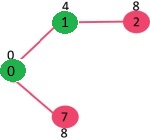
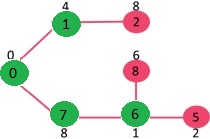
选取具有最小键值且尚未包含在 MST 中(不在 mstSET 中)的顶点。我们可以选择顶点7或顶点2,让顶点7被选中。所以 mstSet 现在变成 {0, 1, 7}。更新相邻顶点 7 的键值。顶点 6 和 8 的键值变为有限(分别为 1 和 7)。
选取具有最小键值且尚未包含在 MST 中(不在 mstSET 中)的顶点。选取顶点 6。所以 mstSet 现在变成 {0, 1, 7, 6}。更新相邻顶点 6 的键值。顶点 5 和 8 的键值将更新。
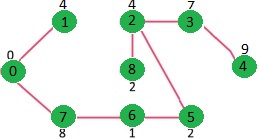
我们重复上述步骤,直到 mstSet 包含给定图形的所有顶点。最后,我们得到下图。
Prim算法的实现(golang)
prim算法的思想和Dijkstra很相似,在理解Dijkstra算法的前提下,理解Prim算法及其实现都会变得非常容易
//graph 中值为math.MaxInt的值为不可达
func prim(graph [][]int, randomVertex int) int {
n := len(graph)
//图中已经遍历到的顶点到未遍历的顶点的最短的距离
dist := make([]int, n)
//图中的顶点是否被访问过
visit := make([]bool, n)
//最小生成书的路径和
res := 0
curIdx := randomVertex
//标记初始访问节点
visit[curIdx] = true
//初始化当前节点到未访问节点的距离
for i := 0; i < n; i++ {
dist[i] = graph[curIdx][i]
}
//由于已经初始化一个节点,所以只需便利n-1次
for i := 1; i < n; i++ {
minor := math.MaxInt
for j := 0; j < n; j++ {
//寻找与已存在节点相接的最短距离的节点
if !visit[j] && dist[j] < minor {
minor = dist[j]
curIdx = j
}
}
//标记到最短距离的节点为已访问
visit[curIdx] = true
//最短路径值求和
res += minor
//重新初始化已访问节点到未访问节点的距离
for j := 0; j < n; j++ {
/**
仅更新没有访问过的节点且节点小于当前距离的节点
(因为如果graph[curIdx][j]> dist[j]的话,说明当前已经有节点到节点j的距离更小,
所以此边(graph[curIdx][j])永远也不会被用到)
*/
if !visit[j] && graph[curIdx][j] < dist[j] {
dist[j] = graph[curIdx][j]
}
}
}
return res
}
堆优化版的Prim算法
// Edge 最小生成树prim算法(寻找已知节点到位置节点的最小路径用堆优化)
//graph 中值为math.MaxInt的值为不可达
type Edge struct {
startVertex int
endVertex int
weight int
}
type EdgeHeap []Edge
func (h EdgeHeap) Len() int { return len(h) }
func (h EdgeHeap) Less(i, j int) bool { return h[i].weight < h[j].weight }
func (h EdgeHeap) Swap(i, j int) { h[i], h[j] = h[j], h[i] }
func (h *EdgeHeap) Push(x interface{}) {
*h = append(*h, x.(Edge))
}
func (h *EdgeHeap) Pop() interface{} {
n := len(*h)
res := (*h)[n-1]
*h = (*h)[:n-1]
return res
}
func primHeap(graph [][]int, randomVertex int) int {
//F代表两点之间不可达
const F = math.MaxInt
n := len(graph)
//图中已经遍历到的顶点到未遍历的顶点的最短的距离
distHeap := make(EdgeHeap, n)
//图中的顶点是否被访问过
visit := make([]bool, n)
//最小生成书的路径和
res := 0
//节点访问数
count := 1
curIdx := randomVertex
//标记初始访问节点
visit[curIdx] = true
//初始化当前节点到未访问节点的距离
for i := 0; i < n; i++ {
if graph[curIdx][i] != F {
distHeap[i] = Edge{curIdx, i, graph[curIdx][i]}
}
}
heap.Init(&distHeap)
for len(distHeap) > 0 && count < n {
edge := heap.Pop(&distHeap).(Edge)
//两个顶点都已访问过的话,说明如果在加入该条边就构成环,所以跳过
if visit[edge.startVertex] && visit[edge.endVertex] {
continue
}
if !visit[edge.startVertex] {
visit[edge.startVertex] = true
count++
res += edge.weight
for i := 0; i < n; i++ {
if !visit[i] {
heap.Push(&distHeap, Edge{edge.startVertex, i,