番茄工作法由意大利的奇列洛创造。其内容就是:工作25分钟休息5分钟,循环四次后休息15分钟。
本项目就是基于Xilinx Ego1开发板实现一个计时器,该计时器能实现:
- 25分钟工作倒计时
- 5分钟休息倒计时
开发板用户手册(提取码:2019)
板子搭载了8Mbit的SRAM芯片,对于本程序基本不用考虑内存不够的问题。主要看看引脚的定义和数码管部分。还有就是,注意板子的时钟是100MHz,对应P17引脚。
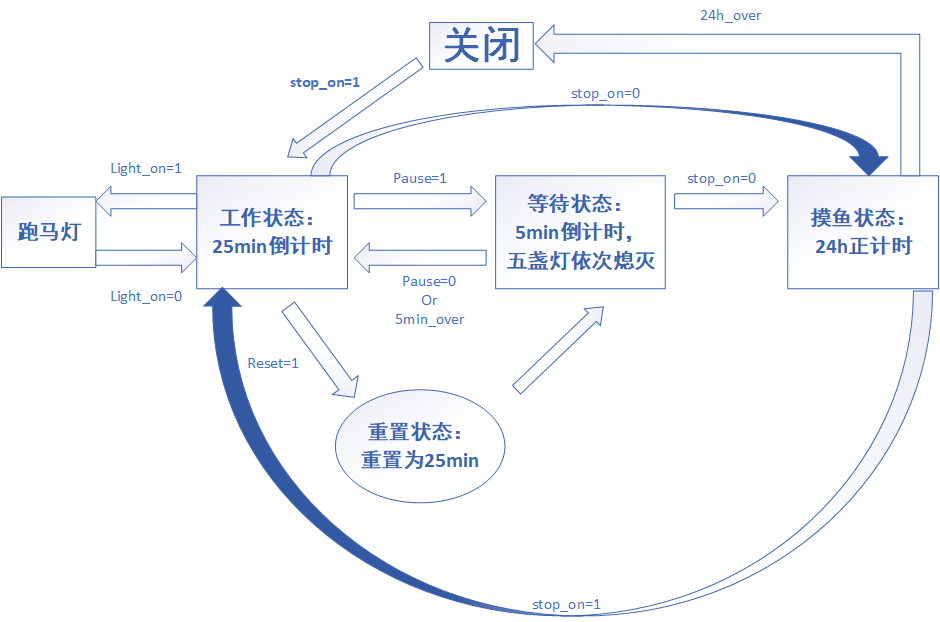
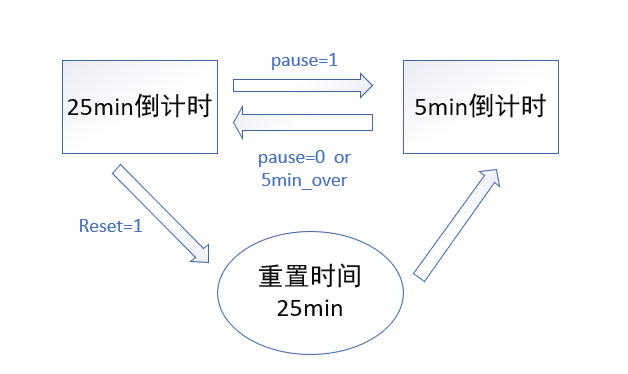
三、系统设计本系统属于时序系统,所以采用状态机,以下是状态转化图
ok,万事俱备,下面开始写bug。
1.计时系统的构建 1.1 秒脉冲发生器系统中需要秒脉冲的两个模块是25min倒计时和5min倒计时模块,不妨按下图设计时钟系统
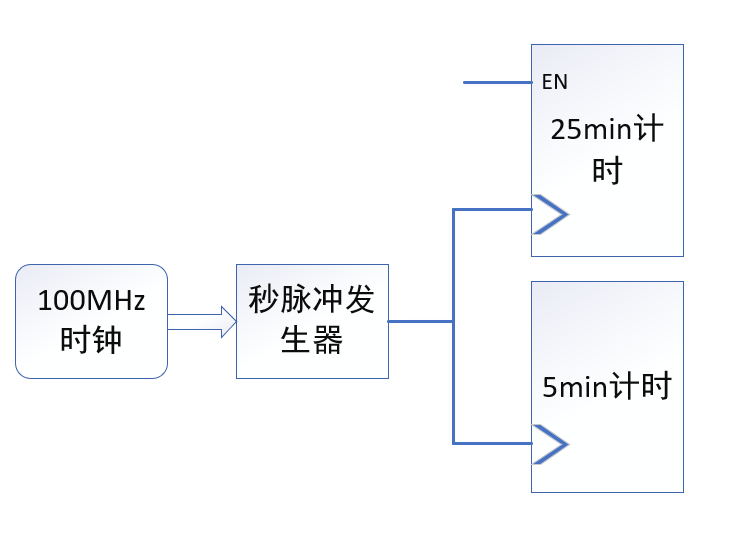
EGO1的时钟是100MHz,构建计时器的关键就是分频得到秒脉冲。由于系统中有多处用到秒脉冲信号,所以不妨单独写一个秒脉冲发生模块:
module sec_gen(
input clk, //系统时钟
input sec_en, //25min秒脉冲使能信号
output reg sec_out, //给25min倒计时模块的时钟
output reg sec_con //给5min倒计时模块的时钟
);
reg [25:0] n;
always @(posedge clk or posedge sec_en)begin
if(sec_en)
sec_out<=sec_con;
else
sec_out<=sec_out;
end
always @(posedge clk)
begin
if(n==26'd5000000) //此处将将秒脉冲设置为0.1s了,方便调试
n<=26'd1;
else
n<=(n+26'd1);
end
always @(posedge clk)
begin
if(n==26'd5000000)
sec_con<=~sec_con;
else
sec_con<=sec_con
end
endmodule
说明:
- 之所以设置两个时钟输出,是为了方便“时间暂停”的实现:25min倒计时过程中,如果按下暂停键,系统会启动5min等待计时,此时给25min倒计时模块的时钟信号恒为“0”或‘’1“,这样暂停结束后,只需要重新给25min模块提供秒脉冲信号,它就能从暂停的地方继续计时。
- 对于五分钟倒计时则没有保存断点时间的需求:它要么计时5min后结束,要么中断,下次开始又是从5min开始计时。
- 由于EGO1的RAM较大,可以使用26位寄存器,所以为了图方便,这里直接分频得到秒脉冲,某些板子的寄存器没有26位,这种情况下,最好对时钟信号进行多次分频。
//25分钟倒计时模块
module timer(
input sec, //秒脉冲信号
input time_rst, //重置
output reg carry_25, //25分钟计时结束信号
output reg [15:0]t //低八位为秒,高八位为分
);
always @(posedge sec or negedge time_rst)begin
if(time_rst)
t<=16'b0010_0101_0000_0000;
//计时满了25min,carry_25拉高,同时将时钟重置为25min
else if(t[15:0]==16'd0)begin
t<=16'b0010_0101_0000_0000;
carry_25<=1'b1;
end
else if(t[11:0]==12'd0)begin
t[11:8]<=4'd9;
t[15:12]<=(t[15:12]-4'd1);
end
else if(t[7:0]==8'd0)begin
t[7:4]<=4'd5;
t[3:0]<=4'd9;
t[11:8]<=(t[11:8]-4'd1);
carry_25<=1'b0;
end
else if(t[3:0]==4'd0)begin
t[3:0]<=4'd9;
t[7:4]<=(t[7:4]-4'd1);
end
else t[3:0]<=(t[3:0]-4'd1);
end
endmodule
说明:
这里的大寄存器同样可以分解成小寄存器,比较优美的写法是多个always结构并行,这里也是图个方便,直接用多个else if,需要注意的是:
if-else if语句不是并行执行的,而是按照代码前后顺序,挨个执行else if ,且一旦符合判断条件,后面的else if 都不会执行
(所以使用多个always并行是更保守的做法)
2.3 5min倒计时//五分钟等待模块
module time_5(
input sec,//秒脉冲信号
input min5_en, //五分钟等待的使能信号
output reg carry_5 //五分钟计时结束的信号
);
reg [11:0]t;//低八位表示秒,高四位表示分
always @(posedge sec or negedge min5_en)begin
if(!min5_en)begin
t<=16'b0101_0000_0000;
carry_5<=1'b0;
end
else if(t[11:0]==11'd0)begin
t<=16'b0101_0000_0000;
carry_5<=1'b1;
end
else if(t[7:0]==8'd0)begin
t[7:4]<=4'd5;
t[3:0]<=4'd9;
t[11:8]<=(t[11:8]-4'd1);
carry_5<=1'b0;
end
else if(t[3:0]==4'd0)begin
t[3:0]<=4'd9;
t[7:4]<=(t[7:4]-4'd1);
end
else t[3:0]<=(t[3:0]-4'd1);
end
endmodule
说明:
跟25min模块一样,唯一需要注意的是,传入该模块的秒脉冲是持续有效的(无稳态),而传入25min模块的秒脉冲是可以通过暂停信号来达到稳态的。
2.数码管显示背景知识:
数码管分为共阴极和共阳极,共阴极就是把所有的管子负极连接到一起,这样当需要某个管子发光时,就给它的正极输入一个高电平(逻辑1);相反共阳极就是将管子的正极都连接起来接到电源上,当需要管子亮时就输入低电平(逻辑0)。EGO1的数码管是共阴极的。
此外,板子上的数码管是四个为一组的,每组数码管受一个四选一多路选择器控制,也就是说同一时间,四个数码管只有一个能使用。所以输出的方式是,四个数码管轮流输出,但是这个轮换的速率很快,快到人眼看不出来,这样人看到就是四个罐子都在发光(显示屏也是这么工作的)。
//数码管控制模块
module pipe(
input clk, //系统100MHz时钟
input run_stop,
input [15:0]x,
output reg [6:0]a_to_g, //单个数码管的输出信号
output reg [3:0]an //数码管选择信号
);
reg [20:0]clkdiv;
wire [1:0]rank;
reg [3:0]digit;
assign rank=clkdiv[20:19];
initial clkdiv<=21'd0;
//对系统100MHz时钟进行分频,作为数码管的扫描频率
always @(posedge clk or negedge run_stop)begin
if(!run_stop)
clkdiv<=21'd0;
else
clkdiv<=clkdiv+21'd1;
end
always @*begin
if(!run_stop)
an=4'd0;
else
case(rank)
2'd0:an=4'b0001;
2'd1:an=4'b0010;
2'd2:an=4'b0100;
2'd3:an=4'b1000;
endcase
end
always @*
case(rank)
2'd0:digit=x[3:0];
2'd1:digit=x[7:4];
2'd2:digit=x[11:8];
2'd3:digit=x[15:12];
default:digit=4'd0;
endcase
always @*
case(digit)
4'd0:a_to_g=7'b1111110;
4'd1:a_to_g=7'b0110000;
4'd2:a_to_g=7'b1101101;
4'd3:a_to_g=7'b1111001;
4'd4:a_to_g=7'b0110011;
4'd5:a_to_g=7'b1011011;
4'd6:a_to_g=7'b1011111;
4'd7:a_to_g=7'b1110000;
4'd8:a_to_g=7'b1111111;
4'd9:a_to_g=7'b1111011;
default:a_to_g=7'b1111110;
endcase
endmodule
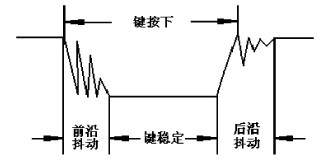
背景知识:
如下图,按键按下到弹起的过程中,电平是高频抖动的,这样如果不加入按键消抖处理,那么在信号抖动的过程中多次触发(比如我们想要的是按下按键暂停计时,如果不加防抖,那么就可能出现计时暂停、打开多次交替进行)。
消抖的基本原理也很简单:让按键信号必须保持一段时间才算有效。简单点讲,就是我收到一个按键信号(如果按键按下是0),先不着急执行按键按下后的程序,而是等几个时钟周期,再看看按键信号还是不是0,如果不是,说明按键在抖动,这个信号是非稳态信号,我就认为它是无效信号;如果还是0,说明确实收到了按键信号,我就开始执行后面的程序。所以,这个等待的时间就必须比抖动时间长,而比键稳定时间短。
//按键消抖模块
module debounce(
input clk, //系统时钟
input run_stop,
input key_in, //输入的按键信号
output wire key_out //输出消抖后的按键信号
);
reg key_value;
reg key_p_flag;
reg key_reg;
reg [20:0]delay_cnt;
parameter DELAY_TIME=21'd1500000; //按键持续时间1/100M s
//key_reg:按键输入寄存器
always@(posedge clk or negedge run_stop)
if(!run_stop)
key_reg<=1'b0;
else
key_reg<=key_in;
//delay_cnt:延时计数器
always@(posedge clk or negedge run_stop)
if(!run_stop)
delay_cnt<=21'b0;
else if(key_in!=key_reg)
delay_cnt<=DELAY_TIME;
else if(delay_cnt>0)
delay_cnt<=delay_cnt-1'b1;
else
delay_cnt<=21'd0;
//key_value
always@(posedge clk or negedge run_stop)
if(!run_stop)
key_value<=1'b0;
else if(delay_cnt==1'b1)
key_value<=key_in;
else
key_value<=key_value;
//key_p_falg:按键上升沿标志信号
always@(posedge clk or negedge run_stop)
if(!run_stop)
key_p_flag<=1'b0;
else if(delay_cnt==1'b1&&key_in==1)
key_p_flag<=1'b1;
else
key_p_flag<=1'b0;
assign key_out=key_p_flag;
endmodule
背景知识:
具体解释看知乎状态机
其实就是个很简单的东西套了一个高大上的名字。以一个大学生为例,假设他只有上课、吃饭、睡觉、上厕所这四个状态,他每天按一定的时序在这四个状态之间切换,而处于每个状态下他就只能做这个状态下规定的事情(比如上课状态下他就不会吃东西,而吃饭状态下也不会排遗),各个状态之间相互独立。
直接上代码:
module states(
input run_stop, //番茄钟工作开关
input reset_up, //重置开关
input pause_up, //暂停开关
input clk, //板载的100MHz时钟
input carry_25, //25分钟计时的进位
input carry_5, //五分钟等待的进位
output reg min5_en, //五分钟等待计时的控制
output reg sec_out_en, //秒脉冲的控制信号
output reg time_rst ///时间重置信号
);
reg [2:0]nstate; //next state
reg [2:0]cstate; //current state
parameter WORK=3'b001;
parameter STOP=3'b010;
parameter WAIT_5=3'b100;
parameter RESET=3'b101;
initial nstate=STOP;
//如果按下了停止,那么现在的状态就保持STOP
//反之,现在的状态就会变成下一个状态
always @(posedge clk or negedge run_stop)
begin
if(!run_stop)
cstate<=STOP;
else
cstate<=nstate;
end
//状态转换(按照当前状态,决定下一个状态是什么)
always @*
begin
case(cstate)
STOP:begin
if(run_stop)begin
nstate=WORK;
end
else
nstate=STOP;
end
WORK:begin
if(run_stop==1'b0)
nstate=STOP;
else if(reset_up==1'b1)
nstate=RESET;
else if(pause_up==1'b1 || carry_25==1'b1)begin
nstate=WAIT_5;
end
else
nstate=WORK;
end
RESET: nstate=WAIT_5;
WAIT_5:begin
if(carry_5==1'b1)
nstate=WORK;
else if(reset_up)
nstate=RESET;
else if(pause_up)
nstate=WORK;
else
nstate=WAIT_5;
end
default:nstate=STOP;
endcase
end
//每个状态下,程序要干的事情
always @*
begin
case(cstate)
//停止状态下:5分钟倒计时停止、25分钟倒计时停止、时间重置
STOP:begin
min5_en<=1'b0;
sec_out_en<=1'b0;
time_rst<=1'b1;
end
//工作状态下:5分钟倒计时停止,25分钟倒计时工作
WORK:begin
min5_en<=1'b0;
time_rst<=1'b0;
sec_out_en<=1'b1;
end
//等待状态下:5分钟倒计时开始,25分钟倒计时暂停
WAIT_5:begin
min5_en<=1'b1;
sec_out_en<=1'b0;
time_rst<=1'b0;
end
//重置状态下:5分钟倒计时停止、25分钟倒计时停止、时间重置
RESET:begin
sec_out_en<=1'b0;
time_rst<=1'b1;
min5_en<=1'b0;
end
default:begin
sec_out_en<=1'b0;
time_rst<=1'b1;
min5_en<=1'b0;
end
endcase
end
endmodule
注意事项:
- 组合逻辑中不要使用非阻塞赋值(状态转换的部分属于组合逻辑),时序逻辑中最好使用非阻塞赋值(描述各个状态下的内容的部分)
- 阻塞赋值和非阻塞赋值的区别
使用第三部分的内容可以完成基本的番茄钟功能。
这里提供一个加了一点花里胡哨的东西的番茄钟:
https://pan.baidu.com/s/1W9OtsmrOPexmkA-3EEXnqA 提取码:2019
添加了这些东西:
- 倒计时的时候有个八位的跑马灯
- 五分钟等待计时的时候有五个led灯,每过一分钟熄灭一个
- 摸鱼状态:按下停止后会进入一个正计时状态,并将时间通过数码管显示,这样就能知道已经多久没有工作了。
它的状态转换图如下: