图的常用存储方式有 2 种:
-
邻接炬阵
-
链接表
邻接炬阵的优点和缺点都很明显。优点是简单、易理解,对于大部分图结构而言,都是稀疏的,使用炬阵存储空间浪费就较大。
链接表的存储相比较邻接炬阵,使用起来更方便,对于空间的使用是刚好够用原则,不会产生太多空间浪费。操作起来,也是简单。
本文将以链接表方式存储图结构,在此基础上实现无向图最短路径搜索。
链接表的存储思路:
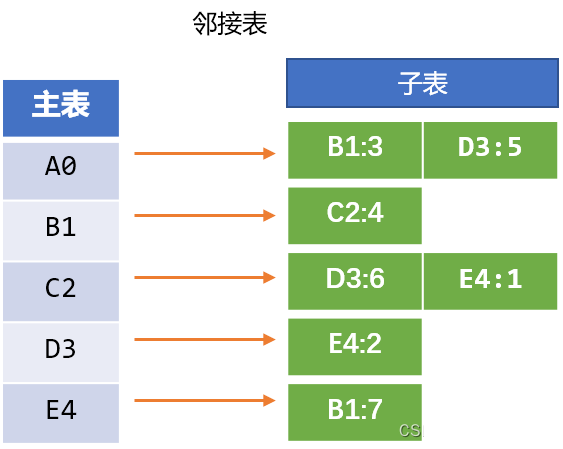
使用链接表实现图的存储时,有主表和子表概念。
- 主表: 用来存储图对象中的所有顶点数据。
- 子表: 每一个顶点自身会维护一个子表,用来存储与其相邻的所有顶点数据。
如下图结构中有 5 个顶点,使用链接表保存时,会有主表 1 张,子表 5 张。链接表的优点是能够紧凑地表示稀疏图。
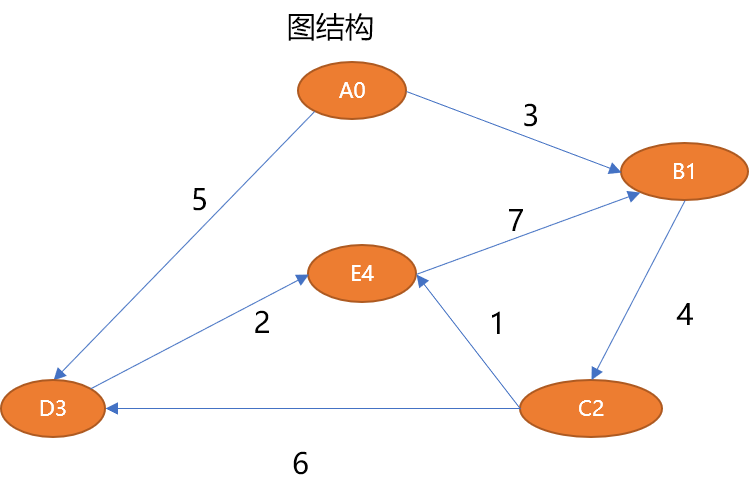
在 Python 中可以使用列表嵌套实现链接表,这应该是最简单的表达方式。
g = [
['A0', [('B1', 3), ('D3', 5)]],
['B1', [('C2', 4)]],
['C2', [('D3', 6), ('E4', 1)]],
['D3', [('E4', 2)]],
['E4', [('B1', 7)]],
]
在此基础上,可以做一些简单的常规操作。
查询所有顶点:
for node in g:
print(node[0],end=' ')
查询顶点及其相邻顶点:
for node in g:
print('-------------------')
print(node[0], ":", end='')
edges = node[1]
for e in edges:
v, w = e
print(v, w, end=';')
print()
当顶点和相邻顶点之间的关系很复杂时,这种层层嵌套的存储格式会让人眼花缭乱。即使要使用这种嵌套方式,那也应该选择 Python 中的字典类型,对于查询会方便很多。
g = {
'A0':{'B1': 3, 'D3': 5},
'B1': {'C2': 4},
'C2': {'D3': 6, 'E4': 1},
'D3': {'E4':2},
'E4': {'B1': 7}
}
如上结构,在查询时,无论是方便性还是性能,都要强于完全的列表方案。
查询所有顶点:
for node in g.keys():
print(node,end=" ")
查询与某一顶点相邻的顶点时,只需要提供顶点名称就可以了。
print("查询与 A0 项点有连接的其它顶点")
for k, v in g.get('A0').items():
print((k, v), end=";")
以上的存储方案,适合于演示,并不适合于开发环境,因顶点本身是具有特定的数据含义(如,可能是城市、公交车站、网址、路由器……),且以上存储方案让顶点和其相邻顶点的信息过度耦合,在实际运用时,会牵一发而动全身。
也许一个微不足道的修改,会波动到整个结构的更新。
所以,有必要引于 OOP 设计理念,让顶点和图有各自特定数据结构,通过 2 种类类型可以更好地体现图是顶点的集合,顶点和顶点之间的多对多关系。
项点类:
class Vertex:
def __init__(self, name, v_id=0):
# 顶点的编号
self.v_id = v_id
# 顶点的名称
self.v_name = name
# 是否被访问过:False 没有 True:有
self.visited = False
# 与此顶点相连接的其它顶点
self.connected_to = {}
顶点类结构说明:
visited:用于搜索路径算法中,检查节点是否已经被搜索过。connected_to:存储与项点相邻的顶点信息。这里使用了字典,以顶点为键,权重为值。
图类:
class Graph:
def __init__(self):
# 一维列表,保存节点
self.vert_list = {}
# 顶点个数
self.v_nums = 0
# 使用队列模拟队列或栈,用于路径搜索算法
self.queue_stack = []
# 保存搜索到的路径
self.searchPath = []
图类结构说明:
queue_stack:使用队列模拟栈或队列。用于路径搜索过程中保存临时数据。
怎么使用列表模拟队列或栈?
列表有
append()、pop()2 个很价值的方法。
append()用来向列表中添加数据,且每次都是从列表最后面添加。
pop()默认从列表最后面删除且弹出数据,pop(参数)可以提供索引值用来从指定位置删除且弹出数据。使用
append()和pop()方法就能模拟栈,从同一个地方进出数据。使用
append()和pop(0)方法就能模拟队列,从后面添加数据,从最前面获取数据
searchPath:用于保存搜索到的路径数据。
从图结构可知,从一个顶点到达另一个顶点,可不止一条可行路径,在众多路径我们总是试图选择一条最短路径,当然,需求不同,衡量一个路径是不是最短路径的标准也会不同。
如打开导航系统后,最短路径可能是费用最少的那条,可能是速度最快的那条,也可能是量程数最少的或者是红绿灯是最少的……
在无向图中,以经过的边数最少的路径为最短路径。
在有向加权图中,会以附加在每条边上的权重的数据含义来衡量。权重可以是时间、速度、量程数……
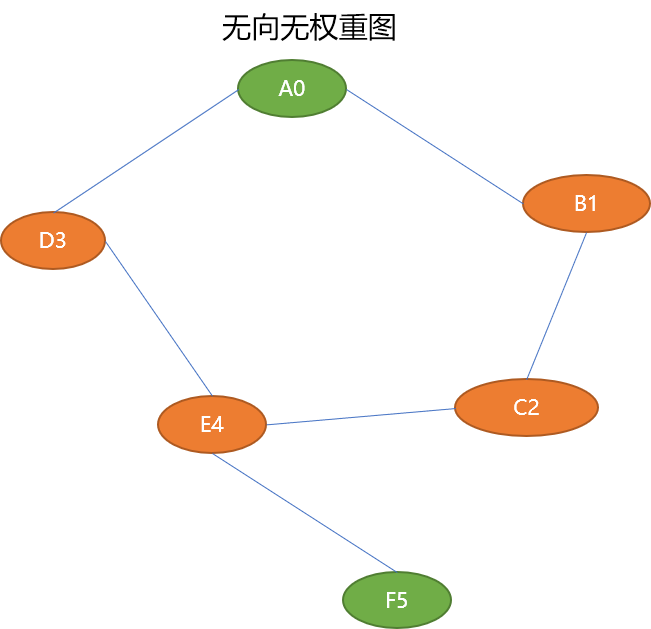
2.1 无向图最短路径算法查找无向图中任意两个顶点间的最短路径长度,可以直接使用广度搜索算法。如下图求解 A0 ~ F5 的最短路径。
Tips: 无向图中任意 2 个顶点间的最短路径长度由边数决定。
广度优先搜索算法流程:
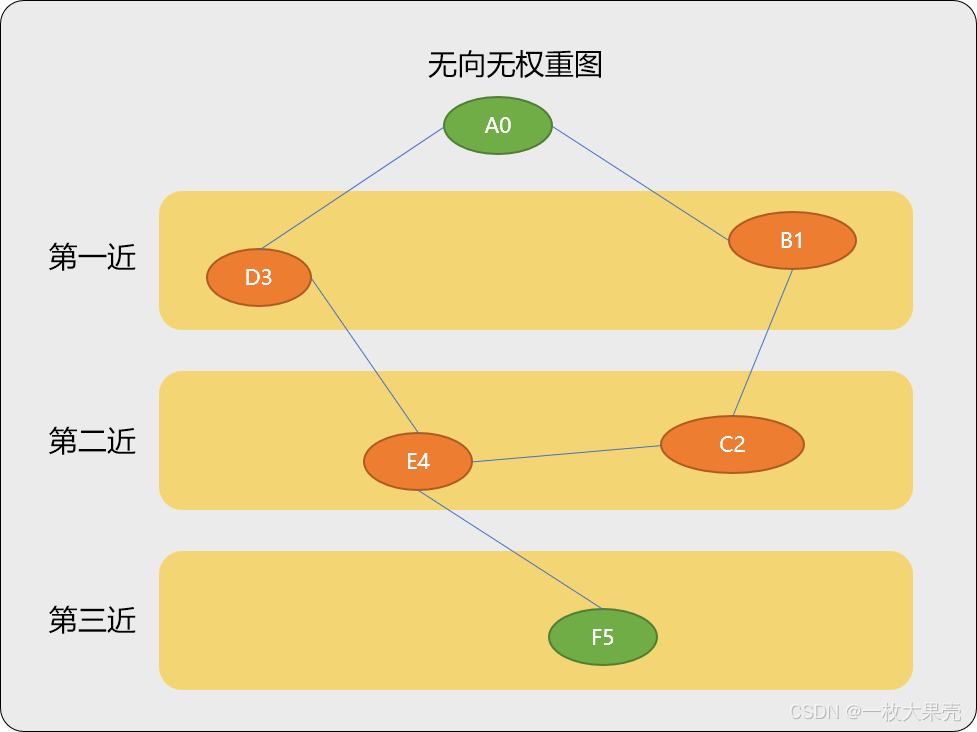
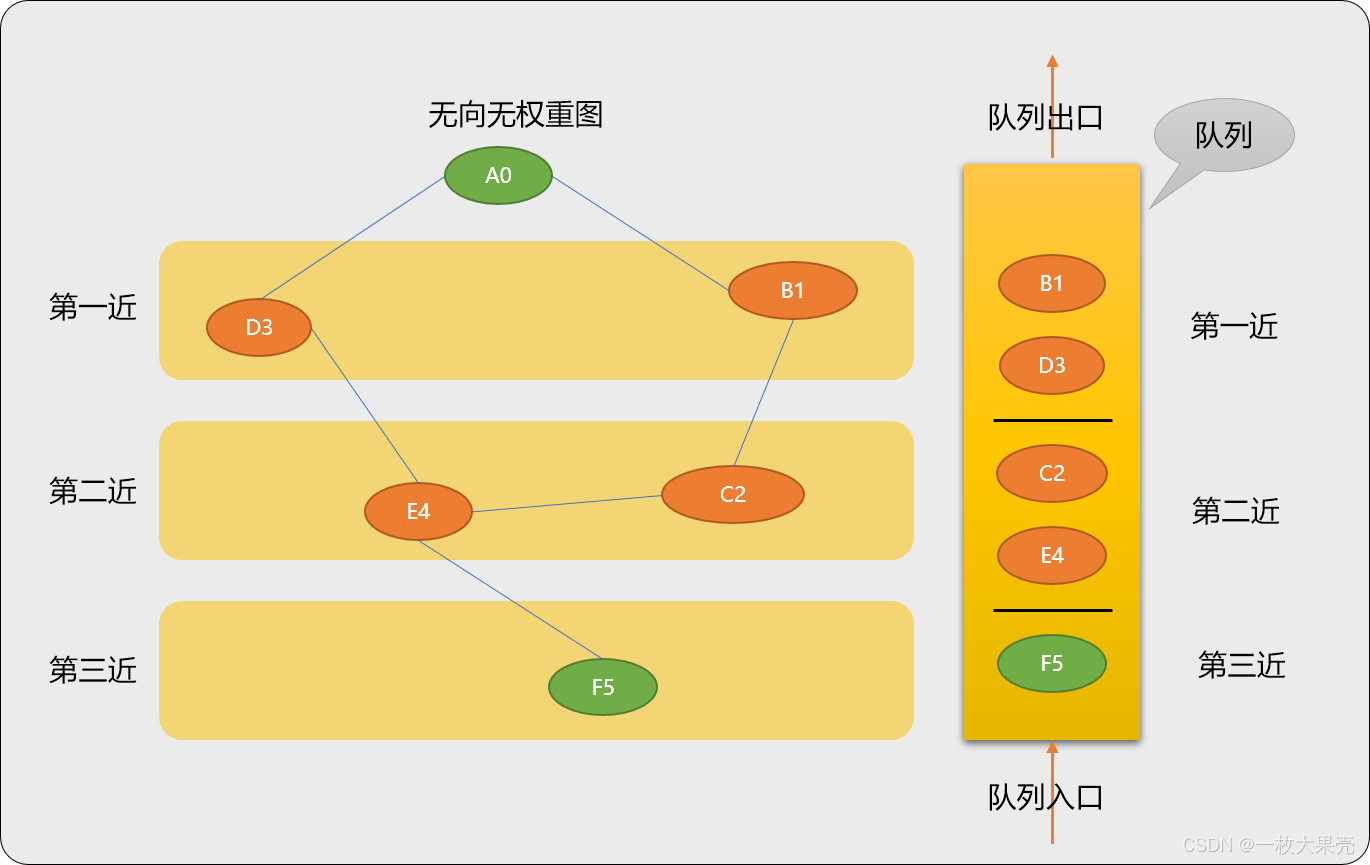
广度优先搜索算法的基本原则:以某一顶点为参考点,先搜索离此顶点最近的顶点,再搜索离最近顶点最近的顶点……以此类推,一层一层向目标顶点推进。
如从顶点 A0 找到顶点 F5。先从离 A0 最近的顶点 B1、D3 找起,如果没找到,再找离 B1、D3 最近的顶点 C2、E4,如果还是没有找到,再找离 C2、E4 最近的顶点 F5。
因为每一次搜索都是采用最近原则,最后搜索到的目标也一定是最近的路径。
也因为采用最近原则,所以搜索过程中,在搜索过程中所经历到的每一个顶点的路径都是最短路径。
最近+最近,结果必然还是最近。
显然,广度优先搜索的最近搜索原则是符合先进先出思想的,具体算法实施时可以借助队列实现整个过程。
算法流程:
-
先确定起始点
A0。 -
找到
A0的 2 个后序顶点B1、D3(或者说B1、D3的前序顶点是A0),压入队列中。除去起点A0,B1、D3顶点属于第一近压入队列的节点。B1和D3压入队列的顺序并不影响A0~B1或A0~D3的路径距离(都是 1)。A0~B1的最短路径长度为 1A0~D3的最短路径长度为 1 -
从队列中搜索
B1时,找到B1的后序顶点C2并压入队列。B1是C2的前序顶点。B1~C2的最短路径长度为 1,而又因为A0~B1的最短路径长度为 1 ,所以A0~C2的最短路径为 2 -
B1搜索完毕后,在队列中搜索B3时,找到B3的后序顶点E4,压入队列。因B1和D3属于第一近顶点,所以这 2 个顶点的后序顶点C2、E4属于第二近压入队列,或说A0-B1-C2、A0-D3-E4的路径距离是相同的(都为 2)。 -
当搜索到
C2时,没有后序顶点,此时队列没有压入操作。 -
当 搜索到
E4时,E4有 2 个后序顶点C2、F5,因C2已经压入过,所以仅压入F5。因F5是由第二近顶点压入,所以F5是属于第三近压入顶点。A0-D3-E4-F5的路径为 3。
编码实现广度优先算法:
在顶点类中添加如下几个方法:
class Vertex:
def __init__(self, v_name, v_id=0):
# 顶点的编号
self.v_id = v_id
# 顶点的名称
self.v_name = v_name
# 是否被访问过:False 没有 True:有
self.visited = False
# 与此顶点相连接的其它顶点
self.connected_to = {}
'''
添加邻接顶点
nbr_ver:相邻顶点
weight:无向无权重图,权重默认设置为 1
'''
def add_neighbor(self, nbr_ver, weight=1):
# 以相邻顶点为键,权重为值
self.connected_to[nbr_ver] = weight
'''
显示与当前顶点相邻的顶点
'''
def __str__(self):
return '与 {0} 顶点相邻的顶点有:{1}'.format(self.v_name,
str([(key.v_name, val) for key, val in self.connected_to.items()]))
'''
得到相邻顶点的权重
'''
def get_weight(self, nbr_v):
return self.connected_to[nbr_v]
'''
判断给定的顶点是否和当前顶点相邻
'''
def is_neighbor(self, nbr_v):
return nbr_v in self.connected_to
顶点类用来构造一个新顶点,并维护与相邻顶点的关系。
对图类中的方法做一下详细解释:
初始化方法:
class Graph:
def __init__(self):
# 一维列表,保存节点
self.vert_list = {}
# 顶点个数
self.v_nums = 0
# 使用队列模拟队列或栈,用于路径搜索算法
self.queue_stack = []
# 保存搜索到的路径
self.searchPath = []
为图添加新顶点方法:
def add_vertex(self, vert):
if vert.v_name in self.vert_list:
# 已经存在
return
# 顶点的编号内部生成
vert.v_id = self.v_nums
# 所有顶点保存在图所维护的字典中,以顶点名为键,顶点对象为值
self.vert_list[vert.v_name] = vert
# 数量增一
self.v_nums += 1
顶点的编号由图对象内部指定,便于统一管理。
所有顶点保存在一个字典中,以顶点名称为键,顶点对象为值。也可以使用列表直接保存顶点,根据需要决定。
提供一个根据顶点名称返回顶点的方法:
'''
根据顶点名找到顶点对象
'''
def find_vertex(self, v_name):
if v_name in self.vert_list:
return self.vert_list.get(v_name)
# 查询所有顶点
def find_vertexes(self):
return [str(ver) for ver in self.vert_list.values()]
添加顶点与相邻顶点的关系:此方法属于一个封装方法,本质是调用顶点自身的添加相邻顶点方法。
'''
添加节点与节点之间的关系(边),
如果是无权重图,统一设定为 1
'''
def add_edge(self, from_v, to_v, weight=1):
# 如果节点不存在
if from_v not in self.vert_list:
self.add_vertex(from_v)
if to_v not in self.vert_list:
self.add_vertex(to_v)
from_v.add_neighbor(to_v, weight)
图中核心方法:用来广度优先搜索算法查找顶点与顶点之间的路径
'''
广度优先搜索
'''
def bfs_nearest_path(self, from_v, to_v):
tmp_path = []
tmp_path.append(from_v)
# 起始顶点不用压入队列
from_v.visited = True
# from_v 顶点的相邻顶点压入队列
self.push_queue(from_v)
while len(self.queue_stack) != 0:
# 从队列中获取顶点
v_ = self.queue_stack.pop(0)
if from_v.is_neighbor(v_):
# 如果 v_ 是 from_v 的后序相邻顶点,则连接成一条中路径信息
tmp_path.append(v_)
# 添加路径信息
self.searchPath.append(tmp_path)
tmp_path = tmp_path.copy()
tmp_path.pop()
else:
for path_ in self.searchPath:
tmp_path = path_.copy()
tmp = tmp_path[len(tmp_path) - 1]
if tmp.is_neighbor(v_):
tmp_path.append(v_)
self.searchPath.append(tmp_path)
if v_.v_id == to_v.v_id:
break
else:
self.push_queue(v_)
'''
把某一顶点的相邻顶点压入队列
'''
def push_queue(self, vertex):
# 获取 vertex 顶点的相邻顶点
for v_ in vertex.connected_to.keys():
# 检查此顶点是否压入过
if v_.visited:
continue
vertex.visited = True
self.queue_stack.append(v_)
广度优先搜索算法有一个核心点,当搜索到某一个顶点后,需要找到与此顶点相邻的其它顶点,并压入队列中。push_queue() 方法就是做些事情的。如果某一个顶点曾经进过队列,就不要再重复压入队列了。
测试代码:
'''
测试无向图最短路径
'''
if __name__ == '__main__':
# 初始化图
graph = Graph()
# 添加节点
for v_name in ['A', 'B', 'C', 'D', 'E', 'F']:
v = Vertex(v_name)
graph.add_vertex(v)
# 添加顶点之间关系
v_to_v = [('A', 'B'), ('A', 'D'), ('B', 'C'), ('C', 'E'), ('D', 'E'), ('E', 'F')]
# 无向图中每 2 个相邻顶点之间互为关系
for v in v_to_v:
f_v = graph.find_vertex(v[0])
t_v = graph.find_vertex(v[1])
graph.add_edge(f_v, t_v)
graph.add_edge(t_v, f_v)
# 输出所有顶点
print('-----------顶点及顶点之间的关系-------------')
for v in graph.find_vertexes():
print(v)
# 查找路径
print('-------------广度优先搜索--------------------')
# 起始点
f_v = graph.find_vertex('A')
# 目标点
t_v = graph.find_vertex('F')
# 广度优先搜索
graph.bfs_nearest_path(f_v, t_v)
for path in graph.searchPath:
weight = 0
for idx in range(len(path)):
if idx != len(path) - 1:
weight += path[idx].get_weight(path[idx + 1])
print(path[idx].v_name, end='-')
print("的最短路径长度,", weight)
输出结果:
-----------顶点及顶点之间的关系-------------
与 A 顶点相邻的顶点有:[('B', 1), ('D', 1)]
与 B 顶点相邻的顶点有:[('A', 1), ('C', 1)]
与 C 顶点相邻的顶点有:[('B', 1), ('E', 1)]
与 D 顶点相邻的顶点有:[('A', 1), ('E', 1)]
与 E 顶点相邻的顶点有:[('C', 1), ('D', 1), ('F', 1)]
与 F 顶点相邻的顶点有:[('E', 1)]
-------------广度优先搜索--------------------
A-B-的最短路径长度, 1
A-D-的最短路径长度, 1
A-B-C-的最短路径长度, 2
A-D-E-的最短路径长度, 2
A-B-C-E-的最短路径长度, 3
A-D-E-的最短路径长度, 2
A-B-C-E-的最短路径长度, 3
A-D-E-F-的最短路径长度, 3
A-B-C-E-F-的最短路径长度, 4
A-D-E-F-的最短路径长度, 3
A-B-C-E-F-的最短路径长度, 4
广度优先搜索算法也可以使用递归方案:
'''
递归实现
'''
def bfs_nearest_path_dg(self, from_v, to_v):
# 相邻顶点
self.push_queue(from_v)
tmp_v = self.queue_stack.pop(0)
if not tmp_v.visited:
self.searchPath.append(tmp_v)
if tmp_v.v_id == to_v.v_id:
return
self.bfs_nearest_path_dg(tmp_v, to_v)
在无向图中,查找起始点到目标点的最短路径,使用广度优先搜索算法便可实现,但如果是有向加权图,可能不会称心如愿。因有向加权图中的边是有权重的。所以对于有向加权图则需要另择方案。
3. 总结图数据结构的实现过程中会涉及到其它数据结构的运用。学习、使用图数据结构对其它数据结构有重新认识和巩固作用。