这是微机接口的一个项目作业。
这段时间一直在宿舍隔离,没办法进行焊接和测试,但原理和代码已经在学习板子上经过验证。
CAN在工业现场大量应用,尤其是汽车工业,设计一种CAN总线收发节点,该节点自身带8路模拟信号采集,采集结果通过CAN总线发送到上位机并显示。
技术要求(1)系统以51单片机为控制器,和具有CAN接口的器件能通信;
(2)CAN控制器用SJA1000,总线收发器用PCA82C250;
(3)节点带8路模拟信号采集,信号范围0-5V;
(4)用USB转CAN模块,通过USB口接收CAN节点发送的数据,验证结果是否正确。
提交材料(1)提交纸质版设计报告1份(包括测量原理、主要电路设计、主要器件选型、程序设计原理、关键程序设计举例等);
(2)电子版设计报告、系统电气原理图、完整的程序代码
(3)提交实物1套,能现场演示(所需的can调试助手 can总线分析仪可以找我);
(4)该题目4人完成(1人负责硬件设计、1人负责单片机软件设计、1人负责调试、1人负责设计报告的整理编辑以及答辩PPT制作),在设计报告上写清楚每人所承担的工作。
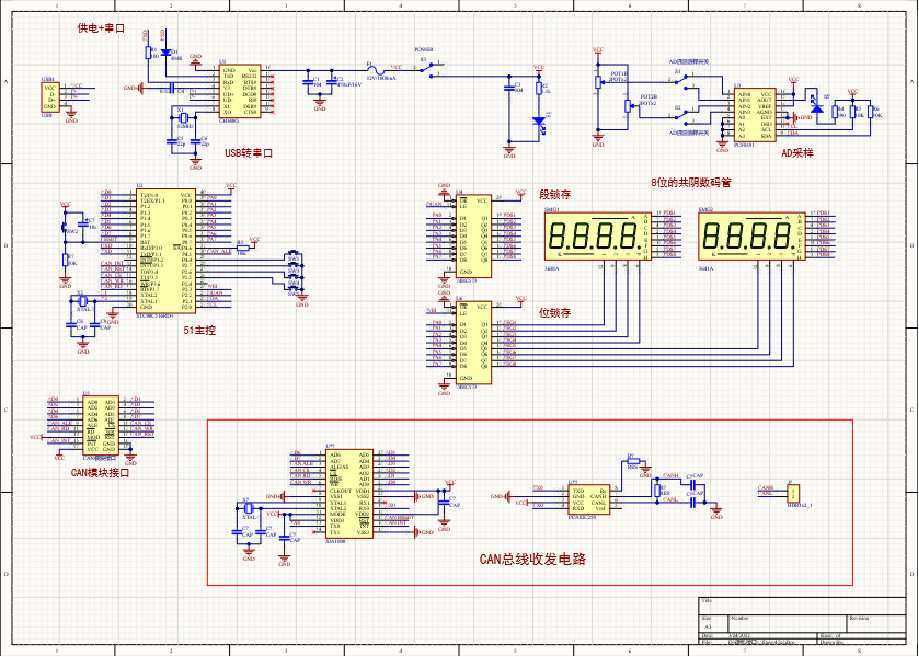
项目实现 设计成果展示 实物展示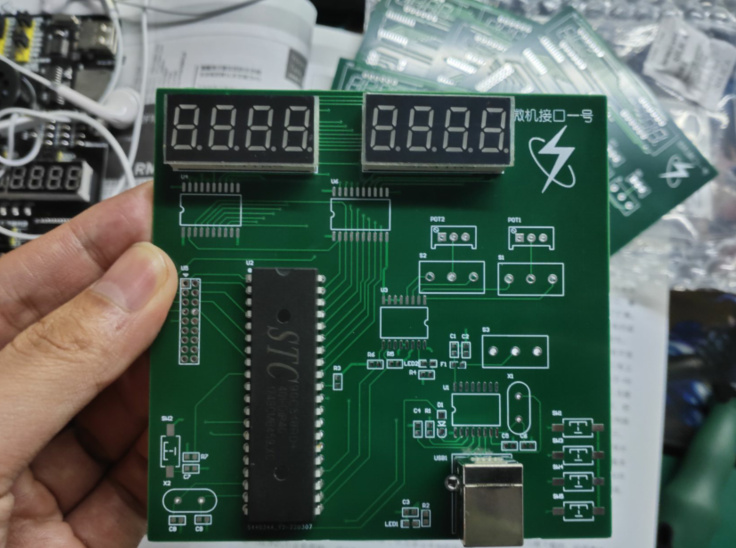 原理图设计
原理图设计
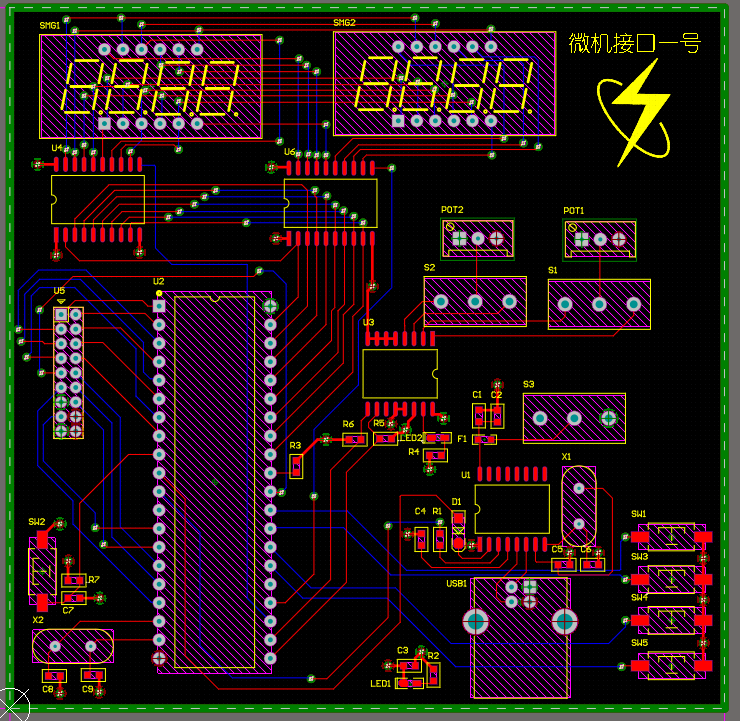
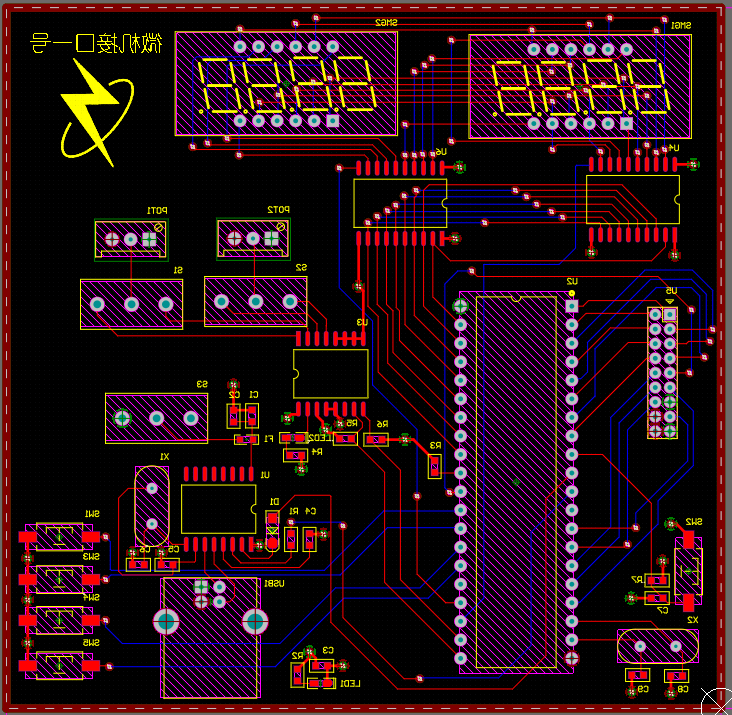
 PCB设计
PCB设计
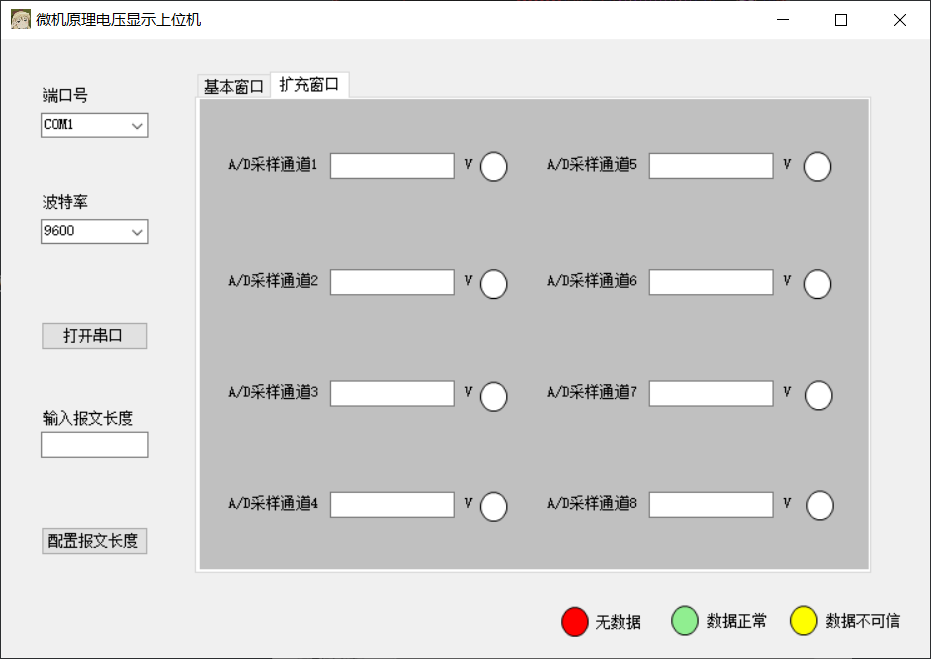
 上位机效果
上位机效果

 测量原理
测量原理
ADC数模转换原理,这里采用PCF8591AD采样芯片,测量原理如下:
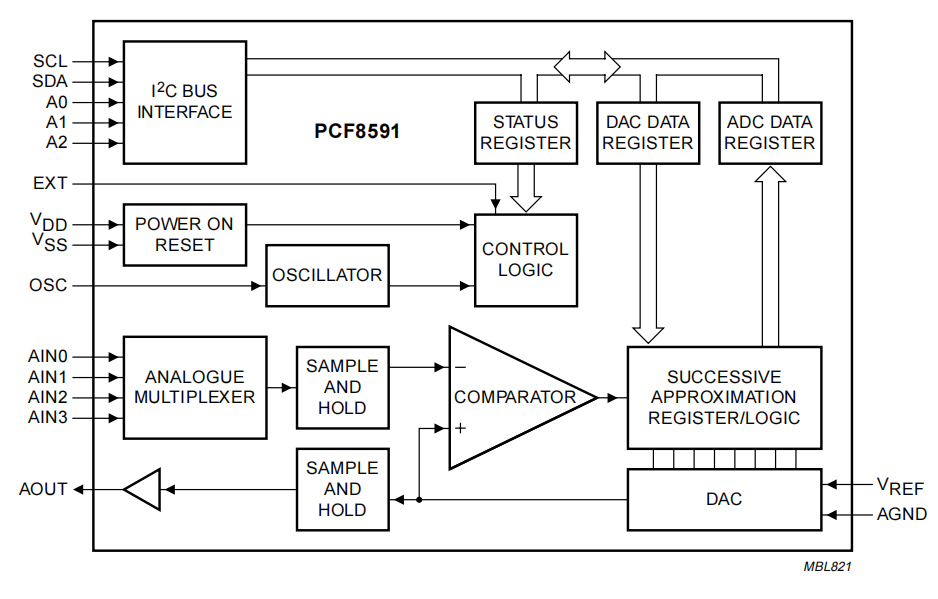
通过引脚AIN0、AIN1、AIN2、AIN3输入的模拟信号(电压),经过模拟信号多路复用器、采样与保持、比较器,把处理后的数据放入ADC数据寄存器中,通过I2C总线接口传递给51主控芯片。
主要电路设计 供电与程序烧录电路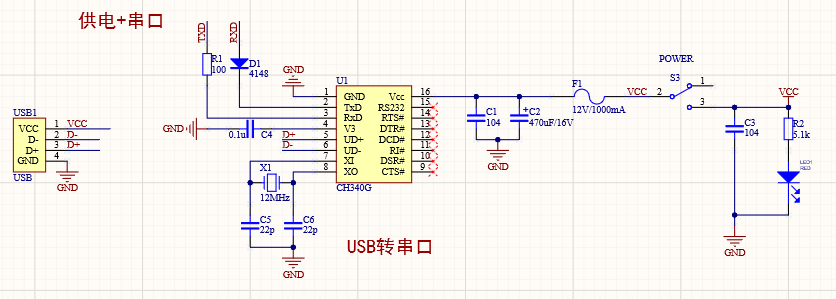
考虑到板子尺寸的限制以及器件的选型,这里采用UCB转串口芯片CH340,在USB供电的同时,又可通过串口进行程序的烧录,一路双用。
VCC直接作为5V电源输入,在串口芯片那边有一个保险丝12V/1000mA的保险丝进行保护,并通过电容进行滤波与稳压,来防止热插拔效应的干扰。
拨动电源开关,可看到电源指示灯亮起。
51主控芯片附近电路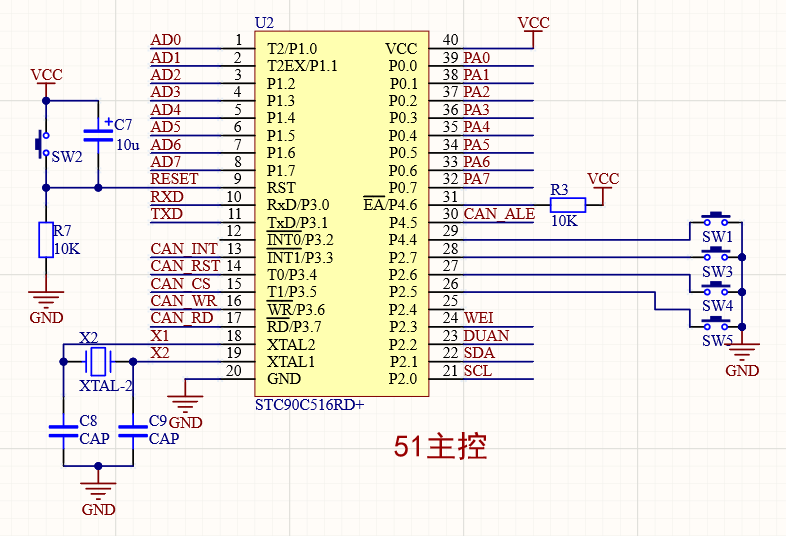
主控芯片选取的是STC90C51RD+,国产51MCU芯片,简单易学,入门容易。工作电压:5.5V-3.4V,工作温度范围:-40-+85°C,工作频率范围:0-40MHz,用户应用程序空间4K,片上集成1280字节RAM,32个通用I/O口,4个外部中断。基本可以满足项目要求,实现对应的功能。
复位电路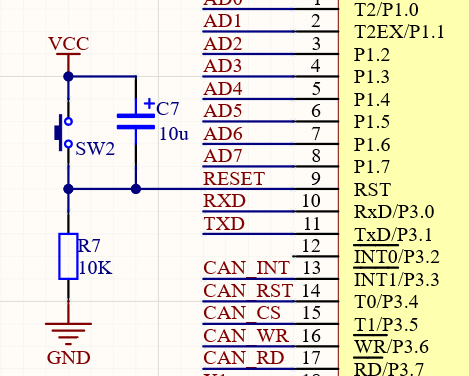
采用阻容复位电路,电容C7是10μF,电阻R7是10K。
晶振电路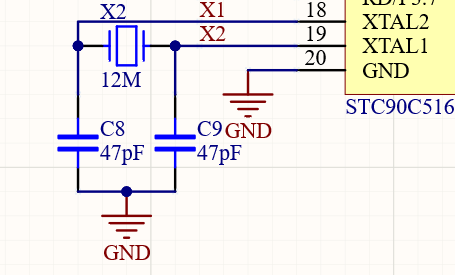
使用外部晶振12MHz,此时电容选取47pF。
AD采样电路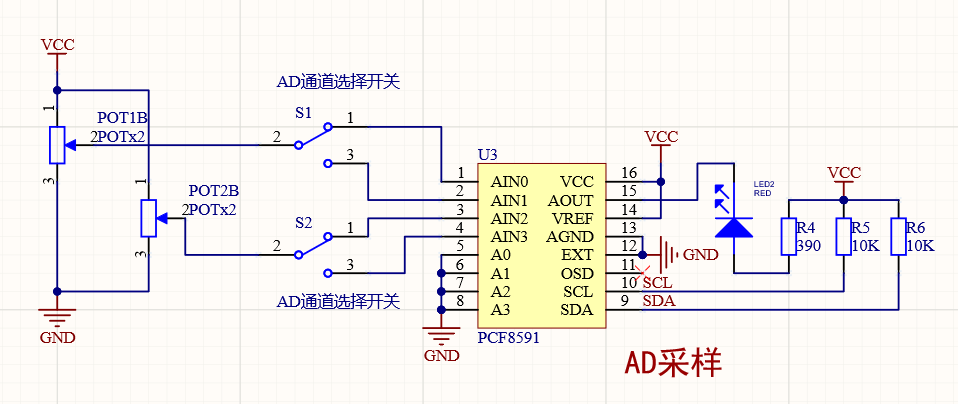
采用PCF8591这款芯片,该芯片具有4路模拟输入通道,8位AD采样精度,以及一个DA输出。
电路部分,使用两个电位器作为采样目标,通过改变电位器阻值来改变采样的数值,并通过开关来切换AD采样的通道。
把采集到的数据存放至8位的数据寄存器中,通过I2C总线传输到51主控芯片中。
利用该芯片的一个DA输出通道,可以连接一个LED的灯,转动电位器,可以观察灯的的亮度发生细微的变化,更加的直观。
数码管驱动电路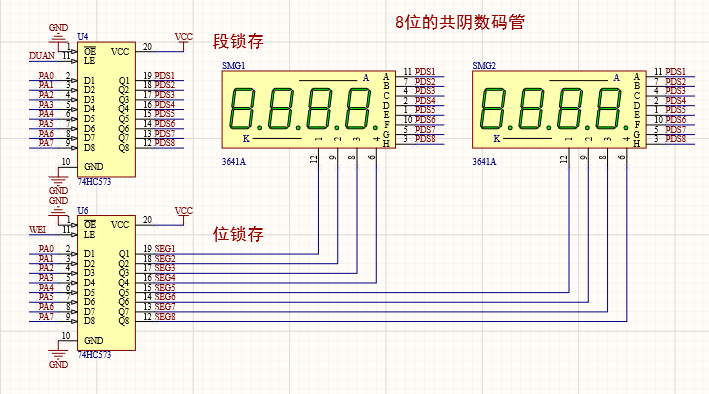
为了便于调试,这里使用8位共阴数码管进行实时显示,数码管驱动芯片选择74HC573,作为最常见的锁存芯片,在这里一个作为位锁存,一个作为段锁存。
数码管这里采用的是共阴数码管,两个4位的数码管,合成一个8位的数码管。
CAN总线通讯电路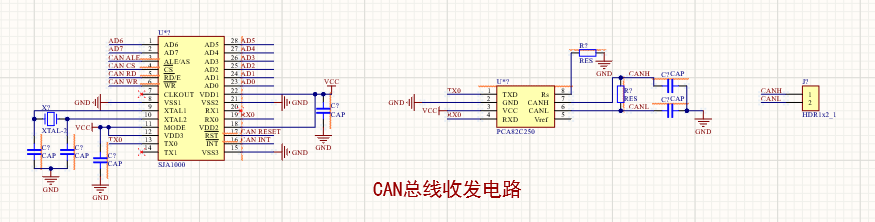
根据实际的项目需求,CAN总线电路采用SJA1000作为CAN控制器,PCA82C250作为CAN总线收发器。
但因单独购买芯片没有相关渠道,转而选择集成化的CAN通讯模块。
主要器件选型器件选型方面本着有现成的就使用现成的、能简单实现的功能就不做的复杂的原则。器件选型上可以分为两类:芯片类,其他电子器件类。
芯片类51主控芯片STC90C516RD+
USB转串口芯片CH340G
AD采样芯片PCF8591
锁存器芯片74HC573
CAN通讯模块
其他器件开关
按键
四位共阴数码管
晶振
供电USB接口
电阻、电容、二极管、LED
程序设计原理 程序框架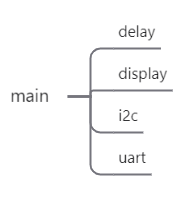
整个程序框架包含了:main.c、display.c、i2c.c、uart.c、delay.c。
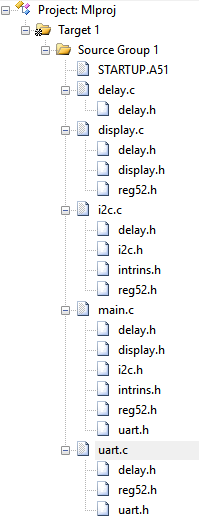
主函数模块main.c,延时函数模块delay.c、数码管驱动函数模块display.c、i2c驱动函数模块i2c.c、串口通讯函数模块uart.c。相关函数都用.h文件进行封装,提供相关的接口,供主函数调用。
主函数模块main.c/*
Date:2022.03.22
Author:
Target:主函数
*/
#include <reg52.h>
#include "i2c.h"
#include "delay.h"
#include "display.h"
#include <uart.h>
#define AddWr 0x90 //写数据地址
#define AddRd 0x91 //读数据地址
extern bit ack;
bit ReadADFlag;
unsigned char VoltData[5]; //存储电压的全局变量,用于串口通讯
unsigned char numback(unsigned char s);
unsigned char ReadADC(unsigned char Chl);
bit WriteDAC(unsigned char dat);
/*------------------------------------------------
主程序
------------------------------------------------*/
main()
{
unsigned char num=0,num0=0,num1=0,num2=0,num3=0,i;
Init_Timer0();
DelayMs(20);
InitUART();
while (1) //主循环
{
if(ReadADFlag)
{
ReadADFlag=0;
//连续读5次,输入通道后多读几次,取最后一次值,以便读出稳定值
for(i=0;i<5;i++)
num0=ReadADC(0);
num0=num0*5*10/256;// x10表示把实际值扩大10,如4.5 变成 45 方便做下一步处理 x5 表示基准电压5V
TempData[0]=dofly_DuanMa[num0/10]|0x80;
TempData[1]=dofly_DuanMa[num0%10];
for(i=0;i<5;i++)
num1=ReadADC(1);
num1=num1*5*10/256; // x10表示把实际值扩大10,如4.5 变成 45 方便做下一步处理
TempData[2]=dofly_DuanMa[num1/10]|0x80;
TempData[3]=dofly_DuanMa[num1%10];
for(i=0;i<5;i++)
num2=ReadADC(2);
num2=num2*5*10/256; // x10表示把实际值扩大10,如4.5 变成 45 方便做下一步处理
TempData[4]=dofly_DuanMa[num2/10]|0x80;
TempData[5]=dofly_DuanMa[num2%10];
for(i=0;i<5;i++)
num=ReadADC(3);
num3=num3*5*10/256; // x10表示把实际值扩大10,如4.5 变成 45 方便做下一步处理
TempData[6]=dofly_DuanMa[num3/10]|0x80;
TempData[7]=dofly_DuanMa[num3%10];
//主循环中添加其他需要一直工作的程序
VoltData[0]=num0;
VoltData[1]=num1;
VoltData[2]=num2;
VoltData[3]=num3;
VoltData[4]=0xff;
SendStr1(VoltData);
DelayMs(240);//延时循环发送
DelayMs(240);
}
/*
SendStr1(VoltData);
DelayMs(240);//延时循环发送
DelayMs(240);
*/
}
}
/*------------------------------------------------
读AD转值程序
输入参数 Chl 表示需要转换的通道,范围从0-3
返回值范围0-255
------------------------------------------------*/
unsigned char ReadADC(unsigned char Chl)
{
unsigned char Val;
Start_I2c(); //启动总线
SendByte(AddWr); //发送器件地址
if(ack==0)return(0);
SendByte(Chl); //发送器件子地址
if(ack==0)return(0);
Start_I2c();
SendByte(AddRd);
if(ack==0)return(0);
Val=RcvByte();
NoAck_I2c(); //发送非应位
Stop_I2c(); //结束总线
return(Val);
}
/*------------------------------------------------
写入DA转换数值
输入参数:dat 表示需要转换的DA数值,范围是0-255
------------------------------------------------*/
/*bit WriteDAC(unsigned char dat)
{
Start_I2c(); //启动总线
SendByte(AddWr); //发送器件地址
if(ack==0)return(0);
SendByte(0x40); //发送器件子地址
if(ack==0)return(0);
SendByte(dat); //发送数据
if(ack==0)return(0);
Stop_I2c();
}*/
```c
##### 延时函数模块delay.c
```c
/*
Date:2022.03.22
Author:
Target:提供延时
*/
#include<delay.h>
//uS延时函数,输入参数t,无返回值,延时时间=t*2+5 uS
void DelayUs2x(unsigned int t)
{
while(--t);
}
//mS延时函数,输入参数t,无返回值,延时时间1mS
void DelayMs(unsigned int t)
{
while(t--)
{
DelayUs2x(245);
DelayUs2x(245);
}
}
#ifndef _DELAY_H_
#define _DELAY_H_
void DelayUs2x(unsigned int t);
void DelayMs(unsigned int t);
#endif
/*
Date:2022.03.22
Author:
Target:数码管驱动
*/
#include<display.h>
#include<delay.h>
#define DataPort P0 //定义数据端口 程序中遇到DataPort 则用P0 替换
//sbit LATCH1 = P2^0;//定义锁存使能端口 段锁存
//sbit LATCH2 = P2^3;// 位锁存
extern bit ReadADFlag;//extern声明,不是定义,外部变量
unsigned char code dofly_DuanMa[10] = {0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};// 显示段码值0~9
unsigned char code dofly_WeiMa[] = {0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};//分别对应相应的数码管点亮,即位码
unsigned char TempData[8]; //存储显示值的全局变量
/*
显示函数,动态扫描数码管,
参数FirstBit 表示需要显示的是第一位,比如0就是从第一个数码管显示,2就是从第三个数码管显示,
参数Num表示要显示的位数,也就是几个数码管显示,如要显示两位数,就应该输入2
*/
void Display(unsigned char FirstBit,unsigned char Num)
{
static unsigned char i = 0;
DataPort=0; //清空数据,防止有交替重影
LATCH1=1; //段锁存
LATCH1=0;
DataPort=dofly_WeiMa[i+FirstBit]; //取位码
LATCH2=1; //位锁存
LATCH2=0;
DataPort=TempData[i]; //取显示数据,段码
LATCH1=1; //段锁存
LATCH1=0;
i++;
if(i==Num)
i=0;
}
/* 定时器初始化 */
void Init_Timer0(void)
{
TMOD |= 0x01; //使用模式1,16位定时器,使用"|"符号可以在使用多个定时器时不受影响
EA=1; //总中断打开
ET0=1; //定时器中断打开
TR0=1; //定时器开关打开
}
/* 定时器中断子程序 */
void Init_Timer0_isr(void) interrupt 1
{
static unsigned int num;
TH0=(65536-2000)/256; //重新赋值 高位 低位
TL0=(65536-2000)%256; //可以理解成,提前减去2000,就是2ms倒计时
Display(0,8); // 调用数码管扫描
num++;
if(num==50) //中断50次,大致100ms
{
num = 0;
ReadADFlag=1;//AD标志位1
}
}
#include<reg52.h>
#ifndef __DISPLAY_H__
#define __DISPLAY_H__
#define DataPort P0 //定义数据端口 程序中遇到DataPort 则用P0 替换
sbit LATCH1=P2^2;//定义锁存使能端口 段锁存
sbit LATCH2=P2^3;// 位锁存
extern unsigned char TempData[8]; //存储显示值的全局变量
extern unsigned char code dofly_DuanMa[10];
void Display(unsigned char FirstBit,unsigned char Num);
void Init_Timer0(void);
#endif
/*
Date:2022.03.22
Author:
Target:i2c驱动
*/
#include <i2c.h>
#include <delay.h>
#define _Nop() _nop_() //定义空指令 一个空指令大致为1us
bit ack;
sbit SDA=P2^1;//数据线
sbit SCL=P2^0;//时钟线
/* 启动i2c总线 */
void Start_I2c()
{
SDA=1; //发送起始条件的数据信号
_Nop();
SCL=1;
_Nop(); //起始条件建立时间大于4.7us,延时
_Nop();
_Nop();
_Nop();
_Nop();
SDA=0; //发送起始信号
_Nop(); //起始条件锁定时间大于4μ
_Nop();
_Nop();
_Nop();
_Nop();
SCL=0; //钳住I2C总线,准备发送或接收数据
_Nop();
_Nop();
}
/* 关闭i2c总线 */
void Stop_I2c()
{
SDA=0; //发送结束条件的数据信号
_Nop(); //发送结束条件的时钟信号
SCL=1; //结束条件建立时间大于4μ
_Nop();
_Nop();
_Nop();
_Nop();
_Nop();
SDA=1; //发送I2C总线结束信号
_Nop();
_Nop();
_Nop();
_Nop();
}
/*
发送字节数据
将数据c发送出去,可以是地址,也可以是数据,发完后等待应答,并对
此状态位进行操作.(不应答或非应答都使ack=0 假)
发送数据正常,ack=1; ack=0表示被控器无应答或损坏。
*/
void SendByte(unsigned char c)
{
unsigned char BitCnt;
for(BitCnt=0;BitCnt<8;BitCnt++) //要传送的数据长度为8位
{
if((c<<BitCnt)&0x80) //把c左移7位,但c本身的值是不会变的
SDA=1; //判断发送位
else SDA=0;
_Nop();
SCL=1; //置时钟线为高,通知被控器开始接收数据位
_Nop();
_Nop(); //保证时钟高电平周期大于4μ
_Nop();
_Nop();
_Nop();
SCL=0;
}
_Nop();
_Nop();
SDA=1; //8位发送完后释放数据线,准备接收应答位
_Nop();
_Nop();
SCL=1;
_Nop();
_Nop();
_Nop();
if(SDA==1)
ack=0;
else ack=1; //判断是否接收到应答信号
SCL=0;
_Nop();
_Nop();
}
/*
接受字节数据
用来接收从器件传来的数据,并判断总线错误(不发应答信号),发完后请用应答函数。
*/
unsigned char RcvByte()
{
unsigned char retc;
unsigned char BitCnt;
retc=0;
SDA=1; //置数据线为输入方式
for(BitCnt=0;BitCnt<8;BitCnt++)
{
_Nop();
SCL=0; //置时钟线为低,准备接收数据位
_Nop();
_Nop(); //时钟低电平周期大于4.7us
_Nop();
_Nop();
_Nop();
SCL=1; //置时钟线为高使数据线上数据有效
_Nop();
_Nop();
retc=retc<<1;
if(SDA==1)retc=retc+1; //读数据位,接收的数据位放入retc中
_Nop();
_Nop();
}
SCL=0;
_Nop();
_Nop();
return(retc);
}
/*----------------------------------------------------------------
应答子函数
原型: void Ack_I2c(void);
----------------------------------------------------------------*/
/*void Ack_I2c(void)
{
SDA=0;
_Nop();
_Nop();
_Nop();
SCL=1;
_Nop();
_Nop(); //时钟低电平周期大于4μ
_Nop();
_Nop();
_Nop();
SCL=0; //清时钟线,钳住I2C总线以便继续接收
_Nop();
_Nop();
}*/
/*----------------------------------------------------------------
非应答子函数
原型: void NoAck_I2c(void);
----------------------------------------------------------------*/
void NoAck_I2c(void)
{
SDA=1;
_Nop();
_Nop();
_Nop();
SCL=1;
_Nop();
_Nop(); //时钟低电平周期大于4μ
_Nop();
_Nop();
_Nop();
SCL=0; //清时钟线,钳住I2C总线以便继续接收
_Nop();
_Nop();
}
/*----------------------------------------------------------------
向无子地址器件发送字节数据函数
函数原型: bit ISendByte(unsigned char sla,ucahr c);
功能: 从启动总线到发送地址,数据,结束总线的全过程,从器件地址sla.
如果返回1表示操作成功,否则操作有误。
注意: 使用前必须已结束总线。
----------------------------------------------------------------*/
/*bit ISendByte(unsigned char sla,unsigned char c)
{
Start_I2c(); //启动总线
SendByte(sla); //发送器件地址
if(ack==0)return(0);
SendByte(c); //发送数据
if(ack==0)return(0);
Stop_I2c(); //结束总线
return(1);
}
*/
/*----------------------------------------------------------------
向有子地址器件发送多字节数据函数
函数原型: bit ISendStr(unsigned char sla,unsigned char suba,ucahr *s,unsigned char no);
功能: 从启动总线到发送地址,子地址,数据,结束总线的全过程,从器件
地址sla,子地址suba,发送内容是s指向的内容,发送no个字节。
如果返回1表示操作成功,否则操作有误。
注意: 使用前必须已结束总线。
----------------------------------------------------------------*/
/*bit ISendStr(unsigned char sla,unsigned char suba,unsigned char *s,unsigned char no)
{
unsigned char i;
for(i=0;i<no;i++)
{
Start_I2c(); //启动总线
SendByte(sla); //发送器件地址
if(ack==0)return(0);
SendByte(suba); //发送器件子地址
if(ack==0)return(0);
SendByte(*s); //发送数据
if(ack==0)return(0);
Stop_I2c(); //结束总线
DelayMs(1); //必须延时等待芯片内部自动处理数据完毕
s++;
suba++;
}
return(1);
}
*/
/*----------------------------------------------------------------
向无子地址器件读字节数据函数
函数原型: bit IRcvByte(unsigned char sla,ucahr *c);
功能: 从启动总线到发送地址,读数据,结束总线的全过程,从器件地
址sla,返回值在c.
如果返回1表示操作成功,否则操作有误。
注意: 使用前必须已结束总线。
----------------------------------------------------------------*/
/*bit IRcvByte(unsigned char sla,unsigned char *c)
{
Start_I2c(); //启动总线
SendByte(sla+1); //发送器件地址
if(ack==0)return(0);
*c=RcvByte(); //读取数据
NoAck_I2c(); //发送非就答位
Stop_I2c(); //结束总线
return(1);
}
*/
/*----------------------------------------------------------------
向有子地址器件读取多字节数据函数
函数原型: bit ISendStr(unsigned char sla,unsigned char suba,ucahr *s,unsigned char no);
功能: 从启动总线到发送地址,子地址,读数据,结束总线的全过程,从器件
地址sla,子地址suba,读出的内容放入s指向的存储区,读no个字节。
如果返回1表示操作成功,否则操作有误。
注意: 使用前必须已结束总线。
----------------------------------------------------------------*/
/*bit IRcvStr(unsigned char sla,unsigned char suba,unsigned char *s,unsigned char no)
{
unsigned char i;
Start_I2c(); //启动总线
SendByte(sla); //发送器件地址
if(ack==0)return(0);
SendByte(suba); //发送器件子地址
if(ack==0)return(0);
Start_I2c();
SendByte(sla+1);
if(ack==0)return(0);
for(i=0;i<no-1;i++)
{
*s=RcvByte(); //发送数据
Ack_I2c(); //发送就答位
s++;
}
*s=RcvByte();
NoAck_I2c(); //发送非应位
Stop_I2c(); //结束总线
return(1);
}
*/
#ifndef __I2C_H__
#define __I2C_H__
#include <reg52.h> //头文件的包含
#include <intrins.h>
#define _Nop() _nop_() //定义空指令
/*------------------------------------------------
启动总线
------------------------------------------------*/
void Start_I2c();
/*------------------------------------------------
结束总线
------------------------------------------------*/
void Stop_I2c();
/*----------------------------------------------------------------
字节数据传送函数
函数原型: void SendByte(unsigned char c);
功能: 将数据c发送出去,可以是地址,也可以是数据,发完后等待应答,并对
此状态位进行操作.(不应答或非应答都使ack=0 假)
发送数据正常,ack=1; ack=0表示被控器无应答或损坏。
------------------------------------------------------------------*/
void SendByte(unsigned char c);
/*----------------------------------------------------------------
字节数据传送函数
函数原型: unsigned char RcvByte();
功能: 用来接收从器件传来的数据,并判断总线错误(不发应答信号),
发完后请用应答函数。
------------------------------------------------------------------*/
unsigned char RcvByte();
/*----------------------------------------------------------------
应答子函数
原型: void Ack_I2c(void);
----------------------------------------------------------------*/
void Ack_I2c(void);
/*----------------------------------------------------------------
非应答子函数
原型: void NoAck_I2c(void);
----------------------------------------------------------------*/
void NoAck_I2c(void);
/*----------------------------------------------------------------
向无子地址器件发送字节数据函数
函数原型: bit ISendByte(unsigned char sla,ucahr c);
功能: 从启动总线到发送地址,数据,结束总线的全过程,从器件地址sla.
如果返回1表示操作成功,否则操作有误。
注意: 使用前必须已结束总线。
----------------------------------------------------------------*/
bit ISendByte(unsigned char sla,unsigned char c);
/*----------------------------------------------------------------
向有子地址器件发送多字节数据函数
函数原型: bit ISendStr(unsigned char sla,unsigned char suba,ucahr *s,unsigned char no);
功能: 从启动总线到发送地址,子地址,数据,结束总线的全过程,从器件
地址sla,子地址suba,发送内容是s指向的内容,发送no个字节。
如果返回1表示操作成功,否则操作有误。
注意: 使用前必须已结束总线。
----------------------------------------------------------------*/
bit ISendStr(unsigned char sla,unsigned char suba,unsigned char *s,unsigned char no);
/*----------------------------------------------------------------
向无子地址器件读字节数据函数
函数原型: bit IRcvByte(unsigned char sla,ucahr *c);
功能: 从启动总线到发送地址,读数据,结束总线的全过程,从器件地
址sla,返回值在c.
如果返回1表示操作成功,否则操作有误。
注意: 使用前必须已结束总线。
----------------------------------------------------------------*/
bit IRcvByte(unsigned char sla,unsigned char *c);
/*----------------------------------------------------------------
向有子地址器件读取多字节数据函数
函数原型: bit ISendStr(unsigned char sla,unsigned char suba,ucahr *s,unsigned char no);
功能: 从启动总线到发送地址,子地址,读数据,结束总线的全过程,从器件
地址sla,子地址suba,读出的内容放入s指向的存储区,读no个字节。
如果返回1表示操作成功,否则操作有误。
注意: 使用前必须已结束总线。
----------------------------------------------------------------*/
bit IRcvStr(unsigned char sla,unsigned char suba,unsigned char *s,unsigned char no);
#endif
#include <reg52.h> //包含头文件,一般情况不需要改动,头文件包含特殊功能寄存器的定义
#include "delay.h"
#include <uart.h>
//串口初始化
void InitUART (void)
{
SCON = 0x50; // SCON: 模式 1, 8-bit UART, 使能接收
TMOD |= 0x20; // TMOD: timer 1, mode 2, 8-bit 重装
TH1 = 0xFD; // TH1: 重装值 9600 波特率 晶振 11.0592MHz
TR1 = 1; // TR1: timer 1 打开
EA = 1; //打开总中断
//ES = 1; //打开串口中断
}
//发送一个字节
void SendByte1(unsigned char dat)
{
SBUF = dat;
while(!TI);
TI = 0;
}
//发送一个字符串
void SendStr1(unsigned char *s)
{
while(*s!=0xff)// \0 表示字符串结束标志,通过检测是否字符串末尾
{
SendByte1(*s);
s++;
}
}
#ifndef __uart_H__
#define __uart_H__
void InitUART (void);
void SendByte1(unsigned char dat);
void SendStr1(unsigned char *s);
#endif
namespace 微机上位机
{
public partial class Form1 : Form
{
//初始化
private void Form1_Load(object sender, EventArgs e)
{
comboBox1.Text = "COM1";
comboBox2.Text = "9600";
serialPort1.DataReceived += new System.IO.Ports.SerialDataReceivedEventHandler(senddata);
}
//接受数据
private void senddata(object sender, System.IO.Ports.SerialDataReceivedEventArgs e)
{
length = serialPort1.BytesToRead; //获取缓冲区字节数
serialPort1.Read(R_data, 0, length);
this.Invoke(new EventHandler(display));
}
//显示数据
private void display(object sender, EventArgs e)
{
double[] sample = new double[8];
sample[0] = (Convert.ToDouble(R_data[0])) / 10;
sample[1] = (Convert.ToDouble(R_data[1])) / 10;
sample[2] = (Convert.ToDouble(R_data[2])) / 10;
sample[3] = (Convert.ToDouble(R_data[3])) / 10;
sample[4] = (Convert.ToDouble(R_data[4])) / 10;
sample[5] = (Convert.ToDouble(R_data[5])) / 10;
sample[6] = (Convert.ToDouble(R_data[6])) / 10;
sample[7] = (Convert.ToDouble(R_data[7])) / 10;
textBox1.Text = sample[0].ToString();
textBox2.Text = sample[1].ToString();
textBox3.Text = sample[2].ToString();
textBox4.Text = sample[3].ToString();
textBox5.Text = sample[0].ToString();
textBox6.Text = sample[1].ToString();
textBox7.Text = sample[2].ToString();
textBox8.Text = sample[3].ToString();
textBox9.Text = sample[4].ToString();
textBox10.Text = sample[5].ToString();
textBox11.Text = sample[6].ToString();
textBox12.Text = sample[7].ToString();
ovalShape1.FillColor = Color.LightGreen;
ovalShape2.FillColor = Color.LightGreen;
ovalShape3.FillColor = Color.LightGreen;
ovalShape4.FillColor = Color.LightGreen;
ovalShape5.FillColor = Color.LightGreen;
ovalShape6.FillColor = Color.LightGreen;
ovalShape7.FillColor = Color.LightGreen;
ovalShape8.FillColor = Color.LightGreen;
ovalShape9.FillColor = Color.LightGreen;
ovalShape10.FillColor = Color.LightGreen;
ovalShape11.FillColor = Color.LightGreen;
ovalShape12.FillColor = Color.LightGreen;
}
//开启串口
private void button1_Click_1(object sender, EventArgs e)
{
R_Flag = 1;
serialPort1.ReceivedBytesThreshold = 4;
serialPort1.RtsEnable = true;
if (serialPort1.IsOpen)
{
try
{
timer1.Stop();
serialPort1.Close();
button1.Text = "打开串口";
}
catch
{
MessageBox.Show("端口错误", "Error");
button1.Text = "关闭串口";
}
}
else
{
try
{
serialPort1.PortName = comboBox1.Text;
serialPort1.BaudRate = Convert.ToInt16(comboBox2.Text, 10);
serialPort1.Parity = System.IO.Ports.Parity.None;
serialPort1.StopBits = System.IO.Ports.StopBits.One;
serialPort1.DataBits = 8;
serialPort1.Open();
timer1.Start();
button1.Text = "关闭串口";
}
catch
{
MessageBox.Show("端口错误", "Error");
serialPort1.Close();
button1.Text = "打开串口";
}
}
}
//配置报文长度
private void button2_Click(object sender, EventArgs e)
{
serialPort1.ReceivedBytesThreshold = Convert.ToInt16(textBox13.Text, 10);
}
}
}
12MHz晶振,一个指令周期大约是1μs,这里封装了两个函数,一个μs级别的,一个ms级别的。
//uS延时函数,输入参数t,无返回值,延时时间=t*2+5 uS
void DelayUs2x(unsigned int t)
{
while(--t);
}
//mS延时函数,输入参数t,无返回值,延时时间1mS
void DelayMs(unsigned int t)
{
while(t--)
{
DelayUs2x(245);
DelayUs2x(245);
}
}
unsigned char code dofly_DuanMa[10] = {0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};// 显示段码值0~9
unsigned char code dofly_WeiMa[] = {0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};//分别对应相应的数码管点亮,即位码
unsigned char TempData[8]; //存储显示值的全局变量
这里是使用到了一个小工具:段码值分别编写0-9的数值。
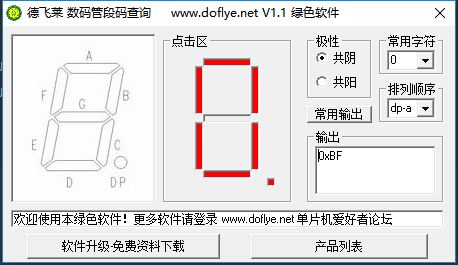
位码则是8位,比如fd代表1111 1101
使用的芯片属于锁存器,打开或者关闭制定锁存器,就可实现数据的显示。
定时器模块的调用/* 定时器初始化 */
void Init_Timer0(void)
{
TMOD |= 0x01; //使用模式1,16位定时器,使用"|"符号可以在使用多个定时器时不受影响
EA=1; //总中断打开
ET0=1; //定时器中断打开
TR0=1; //定时器开关打开
}
/* 定时器中断子程序 */
void Init_Timer0_isr(void) interrupt 1
{
static unsigned int num;
TH0=(65536-2000)/256; //重新赋值 高位 低位
TL0=(65536-2000)%256; //可以理解成,提前减去2000,就是2ms倒计时
Display(0,8); // 调用数码管扫描
num++;
if(num==50) //中断50次,大致100ms
{
num = 0;
ReadADFlag=1;//AD标志位1
}
}
定时器初始化,定时器有四个模式,这里选择模式1,十六位定时器/计数器。
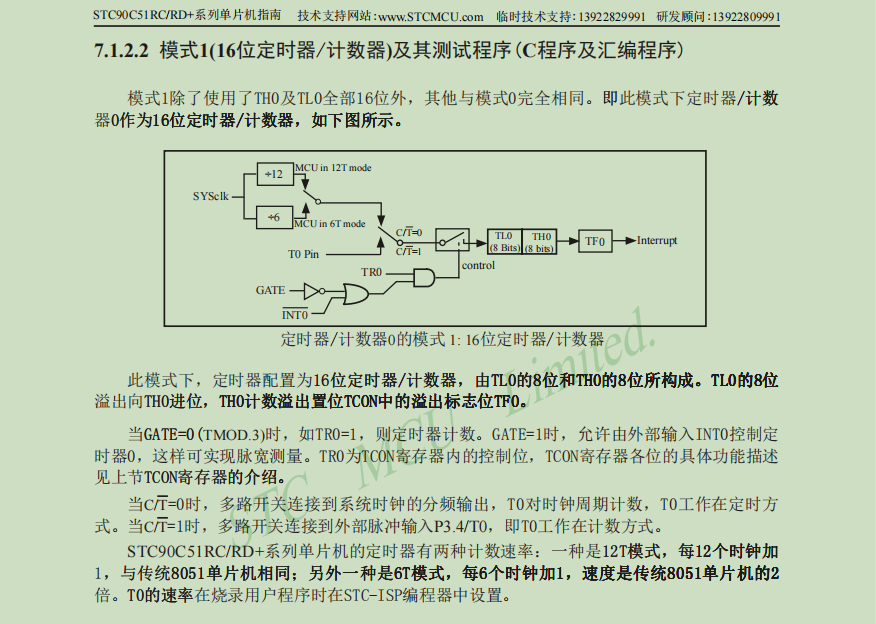
把数码管扫描函数,放到中断函数中,每隔100ms扫描一次。
i2c模块的编写数据线,时钟线,主要参考时序图,什么时候开始发送数据,什么时候结束发送数据。一个空指令是1μs。
/* 启动i2c总线 */
void Start_I2c()
{
SDA=1; //发送起始条件的数据信号
_Nop();
SCL=1;
_Nop(); //起始条件建立时间大于4.7us,延时
_Nop();
_Nop();
_Nop();
_Nop();
SDA=0; //发送起始信号
_Nop(); //起始条件锁定时间大于4μ
_Nop();
_Nop();
_Nop();
_Nop();
SCL=0; //钳住I2C总线,准备发送或接收数据
_Nop();
_Nop();
}
/* 关闭i2c总线 */
void Stop_I2c()
{
SDA=0; //发送结束条件的数据信号
_Nop(); //发送结束条件的时钟信号
SCL=1; //结束条件建立时间大于4μ
_Nop();
_Nop();
_Nop();
_Nop();
_Nop();
SDA=1; //发送I2C总线结束信号
_Nop();
_Nop();
_Nop();
_Nop();
}
发送字符串,要在最后设置一个校验位,就是告诉计算机,这次的数据发完了,停下吧。
//发送一个字符串
void SendStr1(unsigned char *s)
{
while(*s!=0xff)// ff表示数据发完了
{
SendByte1(*s);
s++;
}
}
读取到的数据是一个0~256(二的八次方)之间的数,参考电压这里是5V,所以要把读取到的数带入公式中计算,然后分小数点前的数据,因为要在数码管显示,所以|0x80,加上小数点,小数点后直接保留就好。
//连续读5次,输入通道后多读几次,取最后一次值,以便读出稳定值
for(i=0;i<5;i++)
num0=ReadADC(0);
num0=num0*5*10/256;// x10表示把实际值扩大10,如4.5 变成 45 方便做下一步处理 x5 表示基准电压5V
TempData[0]=dofly_DuanMa[num0/10]|0x80;
TempData[1]=dofly_DuanMa[num0%10];
通讯部分数据处理,十六进制的数据报文。
VoltData[0]=num0;
VoltData[1]=num1;
VoltData[2]=num2;
VoltData[3]=num3;
VoltData[4]=0xff;
SendStr1(VoltData);
DelayMs(240);//延时循环发送
DelayMs(240);