前言 随着自动驾驶技术的如火如荼发展,各种仿真、台架和实际道路试验手段也都应用在研发测试的各个阶段。人才培养也成为企业发展的重要基石。为了帮助高校学生在学校就可以动
前言
随着自动驾驶技术的如火如荼发展,各种仿真、台架和实际道路试验手段也都应用在研发测试的各个阶段。人才培养也成为企业发展的重要基石。为了帮助高校学生在学校就可以动手进行“真实”的操练,德国MdynamiX专门推出了MXcarkit开发套装,为自动驾驶仿真和测试搭建坚实的阶梯。
对于在ADAS/AD领域的学生来说,MXcarkit是快速入门的好帮手,能迅速观测算法的结果。对于教学和研发来说,都是一个非常高效的工具。

MXcarkit的主要特点:
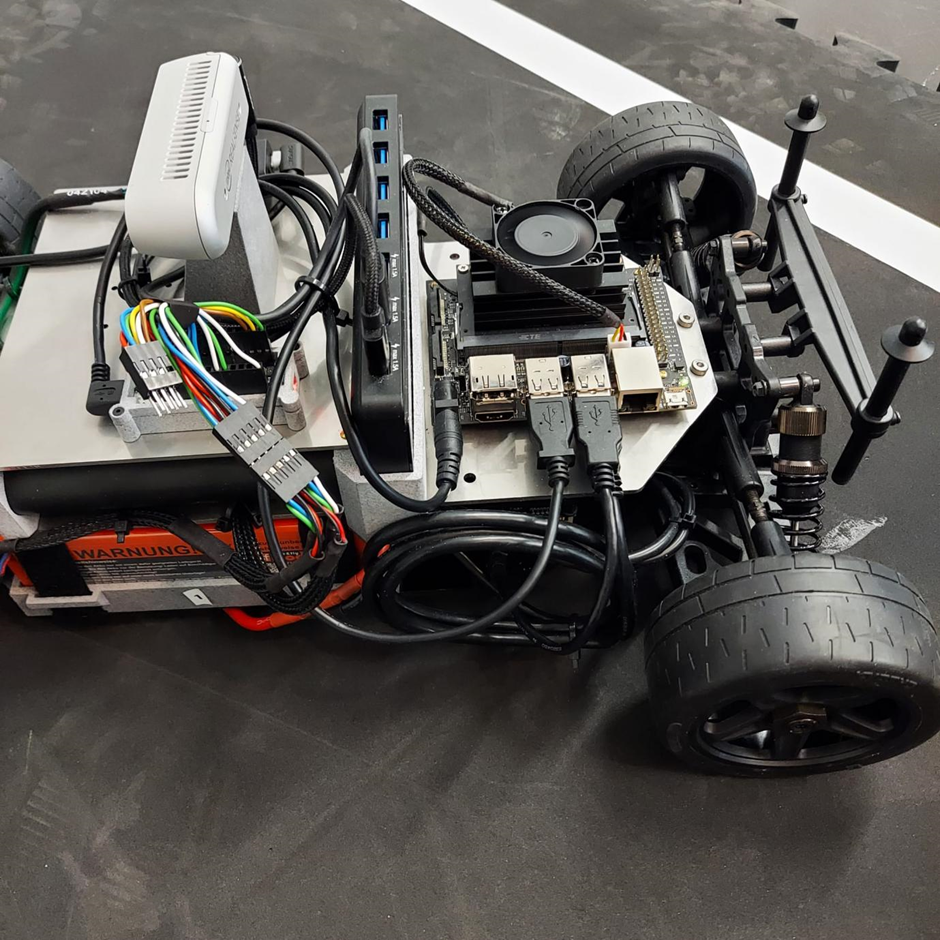
- 载体是一辆1:8的高质量模型车,安装了真实的传感器、特制的电机控制器和一个实时计算机,这样能满足自动驾驶的相关要求。
- 基于功能强大的NVIDIA Jetson计算机,可以访问所有搭载的传感器和执行器,实现车辆动力学控制和面向机器人和人工智能AI的应用。
- 实时计算机NVIDIA Jetson上安装了ROS机器人操作系统。可以方便地对ADAS/AD应用算法进行处理和开发,同时也能借助标准接口来集成更多的传感器和执行器。
- 易于调试和上手,自带基础软件功能(如车道识别和车辆控制),可以方便地进行驾驶操控的编程、进一步的软件开发和参数优化。
- MXcarkit还配备了WLAN模块,可以进行在线远程访问和数据评估。
- MdynamiX还提供在线技术论坛来解答与MXcarkit相关的各种问题
自动泊车APA的研究示例
在德国高校的自动驾驶挑战比赛中,有一个参赛组就是专注挑战自动泊车这个主题,关注车辆如何自动识别泊车空间的标记,规划泊车位置,然后再生成地图用于检测这些泊车位是被占用或空闲。
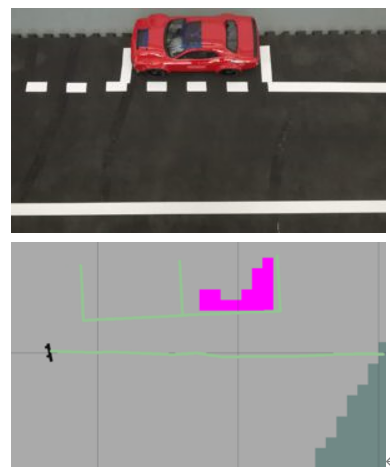
MXcarkit模型车装备与实际车辆相同的传感器技术,可以实现对泊车空间的探测。借助前置摄像头采集的图像,MXcarkit检测到泊车位标志线并把图像坐标系转换成车辆坐标系,再结合环境地图,车辆就能自动泊车。这样可以同时探测到泊车过程中的动静态障碍,并检测泊车空间是否可用。除了自行开发泊车空间检测系统外,还可以在该系统上添加基于广泛应用的ROS代码包的传感器数据融合和SLAM(即时定位和地图构建)算法。
MXcarkit的优势非常明显。预置成熟硬件和接口,自带各种传感器驱动。这样学生(工程师)可以100%关注最重要的任务,比如检测停车位,计算车辆到泊车位的位置等算法。甚至更高阶的研究,比如基于轨迹规划的完全自动泊车,基于传感器数据融合提升车辆里程估算,这些都可以基于MXcarkit展开。

MXcarkit自动驾驶套装
车辆平台:
- 高品质1:8模型车
- 电机控制:FSESC 4.20
- ECU和传感器供电:2x 7.4V 锂离子电池 (25 Ah)
ECUs:
- NVIDIA Jetson Nano (128 CUDA-Cores, 4 GB RAM and Wifi Module)
- 1x STM32 Nucleo:用于超声波传感器、RC接收器和可选车灯的数据采集和预处理。
- FLIPSKY FSESC4.20
传感器:
- 双目摄像头:Intel® RealSense™ Depth Camera D435i with integrated IMU
- 超声波传感器:10x (带自动环境温度补偿)
- RPLIDAR A3
- 2x IMU 6DOF
定制的安装架:
- NVIDIA Jetson Board
- Lithium Polymer Powerpack
- Steering Servo
- Camera
- STM32 Nucleo Board
- Ultrasound Sensors
- USB Hub
- IMU
- LIDAR
软件:
- 机器人操作系统ROS
- 基础传感器的集成
- 电机控制
- 转向控制
- 基于图像处理和人工智能AI算法的路径控制示例
附件:
- Remote control
- 电池充电器
- USB Hub
- 快速入门指南