PID大家都非常熟悉了,这里就不多谈了,模糊控制可以看一下B站的相关视频,比如这个【入门】智能控制 | 20分钟搞定模糊控制 下面的代码来自github,我主要对github的代码进行了一些修
PID大家都非常熟悉了,这里就不多谈了,模糊控制可以看一下B站的相关视频,比如这个【入门】智能控制 | 20分钟搞定模糊控制
下面的代码来自github,我主要对github的代码进行了一些修改,优化了结果。
main.cpp文件
#include<iostream>
#include"fuzzy_PID.h"
#define NB -3
#define NM -2
#define NS -1
#define ZO 0
#define PS 1
#define PM 2
#define PB 3
int main()
{
float target=600;
float actual=0;
float u=0;
int deltaKpMatrix[7][7]={{PB,PB,PM,PM,PS,ZO,ZO},
{PB,PB,PM,PS,PS,ZO,NS},
{PM,PM,PM,PS,ZO,NS,NS},
{PM,PM,PS,ZO,NS,NM,NM},
{PS,PS,ZO,NS,NS,NM,NM},
{PS,ZO,NS,NM,NM,NM,NB},
{ZO,ZO,NM,NM,NM,NB,NB}};
int deltaKiMatrix[7][7]={{NB,NB,NM,NM,NS,ZO,ZO},
{NB,NB,NM,NS,NS,ZO,ZO},
{NB,NM,NS,NS,ZO,PS,PS},
{NM,NM,NS,ZO,PS,PM,PM},
{NM,NS,ZO,PS,PS,PM,PB},
{ZO,ZO,PS,PS,PM,PB,PB},
{ZO,ZO,PS,PM,PM,PB,PB}};
int deltaKdMatrix[7][7]={{PS,NS,NB,NB,NB,NM,PS},
{PS,NS,NB,NM,NM,NS,ZO},
{ZO,NS,NM,NM,NS,NS,ZO},
{ZO,NS,NS,NS,NS,NS,ZO},
{ZO,ZO,ZO,ZO,ZO,ZO,ZO},
{PB,NS,PS,PS,PS,PS,PB},
{PB,PM,PM,PM,PS,PS,PB}};
float e_mf_paras[]={-3,-3,-2,-3,-2,-1,-2,-1,0,-1,0,1,0,1,2,1,2,3,2,3,3};
float de_mf_paras[]={-3,-3,-2,-3,-2,-1,-2,-1,0,-1,0,1,0,1,2,1,2,3,2,3,3};
float Kp_mf_paras[]={-3,-3,-2,-3,-2,-1,-2,-1,0,-1,0,1,0,1,2,1,2,3,2,3,3};
float Ki_mf_paras[]={-3,-3,-2,-3,-2,-1,-2,-1,0,-1,0,1,0,1,2,1,2,3,2,3,3};
float Kd_mf_paras[]={-3,-3,-2,-3,-2,-1,-2,-1,0,-1,0,1,0,1,2,1,2,3,2,3,3};
FuzzyPID fuzzypid(1500,650,0.3,0.4,0.2,0.02,0.65,0.005);
fuzzypid.setMf("trimf",e_mf_paras,"trimf",de_mf_paras,"trimf",Kp_mf_paras,"trimf",Ki_mf_paras,"trimf",Kd_mf_paras);
fuzzypid.setRuleMatrix(deltaKpMatrix,deltaKiMatrix,deltaKdMatrix);
cout<<"num target actual"<<endl;
/*fuzzy.showInfo();*/
for(int i=0;i<200;i++)
{
u=fuzzypid.realize(target,actual);
actual+=u;
cout<<i<<" "<<target<<" "<<actual<<endl;
}
fuzzypid.showInfo();
system("pause");
return 0;
}
fuzzy_PID.cpp文件
#include"fuzzy_PID.h"
#include <cmath>
using std::exp;
using std::pow;
FuzzyPID::FuzzyPID(float e_max,float de_max,float kp_max,float ki_max,float kd_max,float Kp0,float Ki0,float Kd0):
target(0),actual(0),emax(e_max),demax(de_max),delta_Kp_max(kp_max),delta_Ki_max(ki_max),delta_Kd_max(kd_max),e_mf_paras(NULL),de_mf_paras(NULL),
Kp_mf_paras(NULL),Ki_mf_paras(NULL),Kd_mf_paras(NULL)
{
e=target-actual;
e_pre_1=0;
e_pre_2=0;
uu=0;
de=e-e_pre_1;
Ke=(N/2)/emax;
Kde=(N/2)/demax;
Ku_p=delta_Kp_max/(N/2);
Ku_i=delta_Ki_max/(N/2);
Ku_d=delta_Kd_max/(N/2);
mf_t_e="No type";
mf_t_de="No type";
mf_t_Kp="No type";
mf_t_Ki="No type";
mf_t_Kd="No type";
Kp=Kp0;
Ki=Ki0;
Kd=Kd0;
A=Kp+Ki+Kd;
B=-2*Kd-Kp;
C=Kd;
}
FuzzyPID::FuzzyPID(float *fuzzyLimit,float *pidInitVal)
{
target=0;
actual=0;
e=0;
e_pre_1=0;
e_pre_2=0;
de=e-e_pre_1;
emax=fuzzyLimit[0];
demax=fuzzyLimit[1];
delta_Kp_max=fuzzyLimit[2];
delta_Ki_max=fuzzyLimit[3];
delta_Kd_max=fuzzyLimit[4];
Ke=(N/2)/emax;
Kde=(N/2)/demax;
Ku_p=delta_Kp_max/(N/2);
Ku_i=delta_Ki_max/(N/2);
Ku_d=delta_Kd_max/(N/2);
mf_t_e="No type";
mf_t_de="No type";
mf_t_Kp="No type";
mf_t_Ki="No type";
mf_t_Kd="No type";
e_mf_paras=NULL;
de_mf_paras=NULL;
Kp_mf_paras=NULL;
Ki_mf_paras=NULL;
Kd_mf_paras=NULL;
Kp=pidInitVal[0];
Ki=pidInitVal[1];
Kd=pidInitVal[2];
A=Kp+Ki+Kd;
B=-2*Kd-Kp;
C=Kd;
}
FuzzyPID::~FuzzyPID()
{
delete [] e_mf_paras;
delete [] de_mf_paras;
delete [] Kp_mf_paras;
delete [] Ki_mf_paras;
delete [] Kd_mf_paras;
}
//三角隶属度函数
float FuzzyPID::trimf(float x,float a,float b,float c)
{
float u;
if(x>=a&&x<=b)
u=(x-a)/(b-a);
else if(x>b&&x<=c)
u=(c-x)/(c-b);
else
u=0.0;
return u;
}
//正态隶属度函数
float FuzzyPID::gaussmf(float x,float ave,float sigma)
{
float u;
if(sigma<0)
{
cout<<"In gaussmf, sigma must larger than 0"<<endl;
}
u=exp(-pow(((x-ave)/sigma),2));
return u;
}
//梯形隶属度函数
float FuzzyPID::trapmf(float x,float a,float b,float c,float d)
{
float u;
if(x>=a&&x<b)
u=(x-a)/(b-a);
else if(x>=b&&x<c)
u=1;
else if(x>=c&&x<=d)
u=(d-x)/(d-c);
else
u=0;
return u;
}
//设置模糊规则Matrix
void FuzzyPID::setRuleMatrix(int kp_m[N][N],int ki_m[N][N],int kd_m[N][N])
{
for(int i=0;i<N;i++)
for(int j=0;j<N;j++)
{
Kp_rule_matrix[i][j]=kp_m[i][j];
Ki_rule_matrix[i][j]=ki_m[i][j];
Kd_rule_matrix[i][j]=kd_m[i][j];
}
}
//设置模糊隶属度函数的子函数
void FuzzyPID::setMf_sub(const string & type,float *paras,int n)
{
int N_mf_e,N_mf_de,N_mf_Kp,N_mf_Ki,N_mf_Kd;
switch(n)
{
case 0:
if(type=="trimf"||type=="gaussmf"||type=="trapmf")
mf_t_e=type;
else
cout<<"Type of membership function must be \"trimf\" or \"gaussmf\" or \"trapmf\""<<endl;
if(mf_t_e=="trimf")
N_mf_e=3;
else if(mf_t_e=="gaussmf")
N_mf_e=2;
else if(mf_t_e=="trapmf")
N_mf_e=4;
e_mf_paras=new float [N*N_mf_e];
for(int i=0;i<N*N_mf_e;i++)
e_mf_paras[i]=paras[i];
break;
case 1:
if(type=="trimf"||type=="gaussmf"||type=="trapmf")
mf_t_de=type;
else
cout<<"Type of membership function must be \"trimf\" or \"gaussmf\" or \"trapmf\""<<endl;
if(mf_t_de=="trimf")
N_mf_de=3;
else if(mf_t_de=="gaussmf")
N_mf_de=2;
else if(mf_t_de=="trapmf")
N_mf_de=4;
de_mf_paras=new float [N*N_mf_de];
for(int i=0;i<N*N_mf_de;i++)
de_mf_paras[i]=paras[i];
break;
case 2:
if(type=="trimf"||type=="gaussmf"||type=="trapmf")
mf_t_Kp=type;
else
cout<<"Type of membership function must be \"trimf\" or \"gaussmf\" or \"trapmf\""<<endl;
if(mf_t_Kp=="trimf")
N_mf_Kp=3;
else if(mf_t_Kp=="gaussmf")
N_mf_Kp=2;
else if(mf_t_Kp=="trapmf")
N_mf_Kp=4;
Kp_mf_paras=new float [N*N_mf_Kp];
for(int i=0;i<N*N_mf_Kp;i++)
Kp_mf_paras[i]=paras[i];
break;
case 3:
if(type=="trimf"||type=="gaussmf"||type=="trapmf")
mf_t_Ki=type;
else
cout<<"Type of membership function must be \"trimf\" or \"gaussmf\" or \"trapmf\""<<endl;
if(mf_t_Ki=="trimf")
N_mf_Ki=3;
else if(mf_t_Ki=="gaussmf")
N_mf_Ki=2;
else if(mf_t_Ki=="trapmf")
N_mf_Ki=4;
Ki_mf_paras=new float [N*N_mf_Ki];
for(int i=0;i<N*N_mf_Ki;i++)
Ki_mf_paras[i]=paras[i];
break;
case 4:
if(type=="trimf"||type=="gaussmf"||type=="trapmf")
mf_t_Kd=type;
else
cout<<"Type of membership function must be \"trimf\" or \"gaussmf\" or \"trapmf\""<<endl;
if(mf_t_Kd=="trimf")
N_mf_Kd=3;
else if(mf_t_Kd=="gaussmf")
N_mf_Kd=2;
else if(mf_t_Kd=="trapmf")
N_mf_Kd=4;
Kd_mf_paras=new float [N*N_mf_Kd];
for(int i=0;i<N*N_mf_Kd;i++)
Kd_mf_paras[i]=paras[i];
break;
default: break;
}
}
//设置模糊隶属度函数的类型和参数
void FuzzyPID::setMf(const string & mf_type_e,float *e_mf,
const string & mf_type_de,float *de_mf,
const string & mf_type_Kp,float *Kp_mf,
const string & mf_type_Ki,float *Ki_mf,
const string & mf_type_Kd,float *Kd_mf)
{
setMf_sub(mf_type_e,e_mf,0);
setMf_sub(mf_type_de,de_mf,1);
setMf_sub(mf_type_Kp,Kp_mf,2);
setMf_sub(mf_type_Ki,Ki_mf,3);
setMf_sub(mf_type_Kd,Kd_mf,4);
}
//实现模糊控制
float FuzzyPID::realize(float t,float a)
{
float u_e[N],u_de[N],u_u[N];
int u_e_index[3],u_de_index[3];//假设一个输入最多激活3个模糊子集
float delta_Kp,delta_Ki,delta_Kd;
float delta_u;
target=t;
actual=a;
e=target-actual;
de=e-e_pre_1/Ke;
e=Ke*e;
de=Kde*de;
/* 将误差e模糊化*/
int j=0;
for(int i=0;i<N;i++)
{
if(mf_t_e=="trimf")
u_e[i]=trimf(e,e_mf_paras[i*3],e_mf_paras[i*3+1],e_mf_paras[i*3+2]);//e模糊化,计算它的隶属度
else if(mf_t_e=="gaussmf")
u_e[i]=gaussmf(e,e_mf_paras[i*2],e_mf_paras[i*2+1]);//e模糊化,计算它的隶属度
else if(mf_t_e=="trapmf")
u_e[i]=trapmf(e,e_mf_paras[i*4],e_mf_paras[i*4+1],e_mf_paras[i*4+2],e_mf_paras[i*4+3]);//e模糊化,计算它的隶属度
if(u_e[i]!=0)
u_e_index[j++]=i; //存储被激活的模糊子集的下标,可以减小计算量
}
for(;j<3;j++)u_e_index[j]=0; //富余的空间填0
/*将误差变化率de模糊化*/
j=0;
for(int i=0;i<N;i++)
{
if(mf_t_de=="trimf")
u_de[i]=trimf(de,de_mf_paras[i*3],de_mf_paras[i*3+1],de_mf_paras[i*3+2]);//de模糊化,计算它的隶属度
else if(mf_t_de=="gaussmf")
u_de[i]=gaussmf(de,de_mf_paras[i*2],de_mf_paras[i*2+1]);//de模糊化,计算它的隶属度
else if(mf_t_de=="trapmf")
u_de[i]=trapmf(de,de_mf_paras[i*4],de_mf_paras[i*4+1],de_mf_paras[i*4+2],de_mf_paras[i*4+3]);//de模糊化,计算它的隶属度
if(u_de[i]!=0)
u_de_index[j++]=i; //存储被激活的模糊子集的下标,可以减小计算量
}
for(;j<3;j++)u_de_index[j]=0; //富余的空间填0
float den=0,num=0;
/*计算delta_Kp和Kp*/
for(int m=0;m<3;m++)
for(int n=0;n<3;n++)
{
num+=u_e[u_e_index[m]]*u_de[u_de_index[n]]*Kp_rule_matrix[u_e_index[m]][u_de_index[n]];
den+=u_e[u_e_index[m]]*u_de[u_de_index[n]];
}
delta_Kp=num/den;
delta_Kp=Ku_p*delta_Kp;
if(delta_Kp>=delta_Kp_max) delta_Kp=delta_Kp_max;
else if(delta_Kp<=-delta_Kp_max) delta_Kp=-delta_Kp_max;
Kp+=delta_Kp;
if(Kp<0)Kp=0;
/*计算delta_Ki和Ki*/
den=0;num=0;
for(int m=0;m<3;m++)
for(int n=0;n<3;n++)
{
num+=u_e[u_e_index[m]]*u_de[u_de_index[n]]*Ki_rule_matrix[u_e_index[m]][u_de_index[n]];
den+=u_e[u_e_index[m]]*u_de[u_de_index[n]];
}
delta_Ki=num/den;
delta_Ki=Ku_i*delta_Ki;
if(delta_Ki>=delta_Ki_max) delta_Ki=delta_Ki_max;
else if(delta_Ki<=-delta_Ki_max) delta_Ki=-delta_Ki_max;
Ki+=delta_Ki;
if(Ki<0)Ki=0;
/*计算delta_Kd和Kd*/
den=0;num=0;
for(int m=0;m<3;m++)
for(int n=0;n<3;n++)
{
num+=u_e[u_e_index[m]]*u_de[u_de_index[n]]*Kd_rule_matrix[u_e_index[m]][u_de_index[n]];
den+=u_e[u_e_index[m]]*u_de[u_de_index[n]];
}
delta_Kd=num/den;
delta_Kd=Ku_d*delta_Kd;
if(delta_Kd>=delta_Kd_max) delta_Kd=delta_Kd_max;
else if(delta_Kd<=-delta_Kd_max) delta_Kd=-delta_Kd_max;
Kd+=delta_Kd;
if(Kd<0)Kd=0;
A=Kp+Ki+Kd;
B=-2*Kd-Kp;
C=Kd;
delta_u=A*e+B*e_pre_1+C*e_pre_2;
delta_u=delta_u/Ke;
if(delta_u>=0.95*target)delta_u=0.95*target;
else if(delta_u<=-0.95*target)delta_u=-0.95*target;
uu += delta_u;
e_pre_2=e_pre_1;
e_pre_1=e;
return uu;
}
void FuzzyPID::showMf(const string & type,float *mf_paras)
{
int tab;
if(type=="trimf")
tab=2;
else if(type=="gaussmf")
tab==1;
else if(type=="trapmf")
tab=3;
cout<<"函数类型:"<<mf_t_e<<endl;
cout<<"函数参数列表:"<<endl;
float *p=mf_paras;
for(int i=0;i<N*(tab+1);i++)
{
cout.width(3);
cout<<p[i]<<" ";
if(i%(tab+1)==tab)
cout<<endl;
}
}
void FuzzyPID::showInfo()
{
cout<<"Info of this fuzzy controller is as following:"<<endl;
cout<<"基本论域e:["<<-emax<<","<<emax<<"]"<<endl;
cout<<"基本论域de:["<<-demax<<","<<demax<<"]"<<endl;
cout<<"基本论域delta_Kp:["<<-delta_Kp_max<<","<<delta_Kp_max<<"]"<<endl;
cout<<"基本论域delta_Ki:["<<-delta_Ki_max<<","<<delta_Ki_max<<"]"<<endl;
cout<<"基本论域delta_Kd:["<<-delta_Kd_max<<","<<delta_Kd_max<<"]"<<endl;
cout<<"误差e的模糊隶属度函数参数:"<<endl;
showMf(mf_t_e,e_mf_paras);
cout<<"误差变化率de的模糊隶属度函数参数:"<<endl;
showMf(mf_t_de,de_mf_paras);
cout<<"delta_Kp的模糊隶属度函数参数:"<<endl;
showMf(mf_t_Kp,Kp_mf_paras);
cout<<"delta_Ki的模糊隶属度函数参数:"<<endl;
showMf(mf_t_Ki,Ki_mf_paras);
cout<<"delta_Kd的模糊隶属度函数参数:"<<endl;
showMf(mf_t_Kd,Kd_mf_paras);
cout<<"模糊规则表:"<<endl;
cout<<"delta_Kp的模糊规则矩阵"<<endl;
for(int i=0;i<N;i++)
{
for(int j=0;j<N;j++)
{
cout.width(3);
cout<<Kp_rule_matrix[i][j]<<" ";
}
cout<<endl;
}
cout<<"delta_Ki的模糊规则矩阵"<<endl;
for(int i=0;i<N;i++)
{
for(int j=0;j<N;j++)
{
cout.width(3);
cout<<Ki_rule_matrix[i][j]<<" ";
}
cout<<endl;
}
cout<<"delta_Kd的模糊规则矩阵"<<endl;
for(int i=0;i<N;i++)
{
for(int j=0;j<N;j++)
{
cout.width(3);
cout<<Kd_rule_matrix[i][j]<<" ";
}
cout<<endl;
}
cout<<endl;
cout<<"误差的量化比例因子Ke="<<Ke<<endl;
cout<<"误差变化率的量化比例因子Kde="<<Kde<<endl;
cout<<"输出的量化比例因子Ku_p="<<Ku_p<<endl;
cout<<"输出的量化比例因子Ku_i="<<Ku_i<<endl;
cout<<"输出的量化比例因子Ku_d="<<Ku_d<<endl;
cout<<"设定目标target="<<target<<endl;
cout<<"误差e="<<e<<endl;
cout<<"Kp="<<Kp<<endl;
cout<<"Ki="<<Ki<<endl;
cout<<"Kd="<<Kd<<endl;
cout<<endl;
}
fuzzy_PID.h文件
#ifndef FUZZY_PID_H_
#define FUZZY_PID_H_
#include<iostream>
#include<string>
using std::string;
using std::cout;
using std::cin;
using std::endl;
class FuzzyPID
{
public:
const static int N=7;
private:
float target; //系统的控制目标
float actual; //采样获得的实际值
float e; //误差
float e_pre_1; //上一次的误差
float e_pre_2; //上上次的误差
float de; //误差的变化率
float emax; //误差基本论域上限
float demax; //误差变化率基本论域的上限
float delta_Kp_max; //delta_kp输出的上限
float delta_Ki_max; //delta_ki输出上限
float delta_Kd_max; //delta_kd输出上限
float Ke; //Ke=n/emax,量化论域为[-3,-2,-1,0,1,2,3]
float Kde; //Kde=n/demax,量化论域为[-3,-2,-1,0,1,2,3]
float Ku_p; //Ku_p=Kpmax/n,量化论域为[-3,-2,-1,0,1,2,3]
float Ku_i; //Ku_i=Kimax/n,量化论域为[-3,-2,-1,0,1,2,3]
float Ku_d; //Ku_d=Kdmax/n,量化论域为[-3,-2,-1,0,1,2,3]
int Kp_rule_matrix[N][N];//Kp模糊规则矩阵
int Ki_rule_matrix[N][N];//Ki模糊规则矩阵
int Kd_rule_matrix[N][N];//Kd模糊规则矩阵
string mf_t_e; //e的隶属度函数类型
string mf_t_de; //de的隶属度函数类型
string mf_t_Kp; //kp的隶属度函数类型
string mf_t_Ki; //ki的隶属度函数类型
string mf_t_Kd; //kd的隶属度函数类型
float *e_mf_paras;//误差的隶属度函数的参数
float *de_mf_paras;//误差的偏差隶属度函数的参数
float *Kp_mf_paras; //kp的隶属度函数的参数
float *Ki_mf_paras; //ki的隶属度函数的参数
float *Kd_mf_paras; //kd的隶属度函数的参数
float Kp;
float Ki;
float Kd;
float A;
float B;
float C;
float uu;
void showMf(const string & type,float *mf_paras); //显示隶属度函数的信息
void setMf_sub(const string & type,float *paras,int n);//设置模糊隶属度函数的子函数
public:
FuzzyPID(float e_max,float de_max,float kp_max,float ki_max,float kd_max,float Kp0,float Ki0,float Kd0);
FuzzyPID(float *fuzzyLimit,float *pidInitVal);
~FuzzyPID();
float trimf(float x,float a,float b,float c); //三角隶属度函数
float gaussmf(float x,float ave,float sigma); //正态隶属度函数
float trapmf(float x,float a,float b,float c,float d); //梯形隶属度函数
void setMf(const string & mf_type_e,float *e_mf,
const string & mf_type_de,float *de_mf,
const string & mf_type_Kp,float *Kp_mf,
const string & mf_type_Ki,float *Ki_mf,
const string & mf_type_Kd,float *Kd_mf); //设置模糊隶属度函数的参数
void setRuleMatrix(int kp_m[N][N],int ki_m[N][N],int kd_m[N][N]); //设置模糊规则
float realize(float t,float a); //实现模糊控制
void showInfo(); //显示该模糊控制器的信息
};
#endif
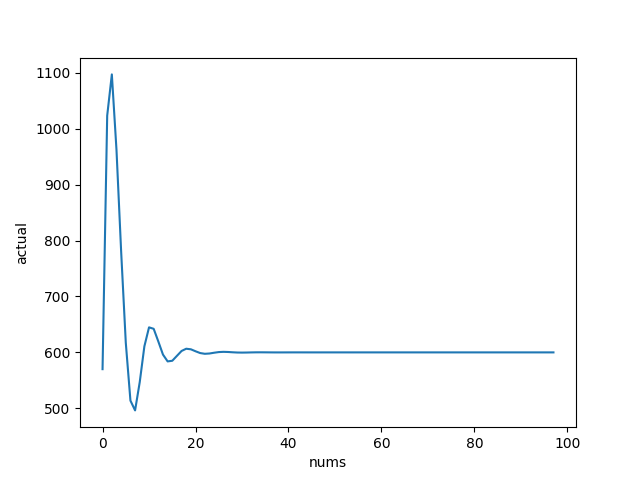
运行结果用python画图得到:
import matplotlib.pyplot as plt
data_all = []
f = open("test.txt",encoding = "utf-8")
line = f.readline()
while True:
line = f.readline()
if line:
data = line.split(' ')[-1][:-1]
data_all.append(float(data))
else:
break
data_all = data_all[:-1]
x = [i for i in range(len(data_all))]
plt.plot(x, data_all)
plt.xlabel('nums')
plt.ylabel('actual')
plt.show()
可以发现抖动比较明显,应该是隶属函数规则设计的问题,暂时还没有很好的解决办法。