1 简介 介绍了一种简单实用的基于Matlab的交互式车辆动力学控制硬件在环仿真系统,即完全利用Matlab工具实现实时交互式车辆动力学控制硬件在环仿真系统.该系统在硬件在环仿真研究过
1 简介
介绍了一种简单实用的基于Matlab的交互式车辆动力学控制硬件在环仿真系统,即完全利用Matlab工具实现实时交互式车辆动力学控制硬件在环仿真系统.该系统在硬件在环仿真研究过程中省去复杂不确定的驾驶员模型,直接把人的驾驶行为作为仿真的一部分嵌入仿真过程.仿真试验结果表明,该仿真方案是可行有效的,对进一步研究ESP控制逻辑以及该系统快速开发研究具有很大的意义.
2 部分代码
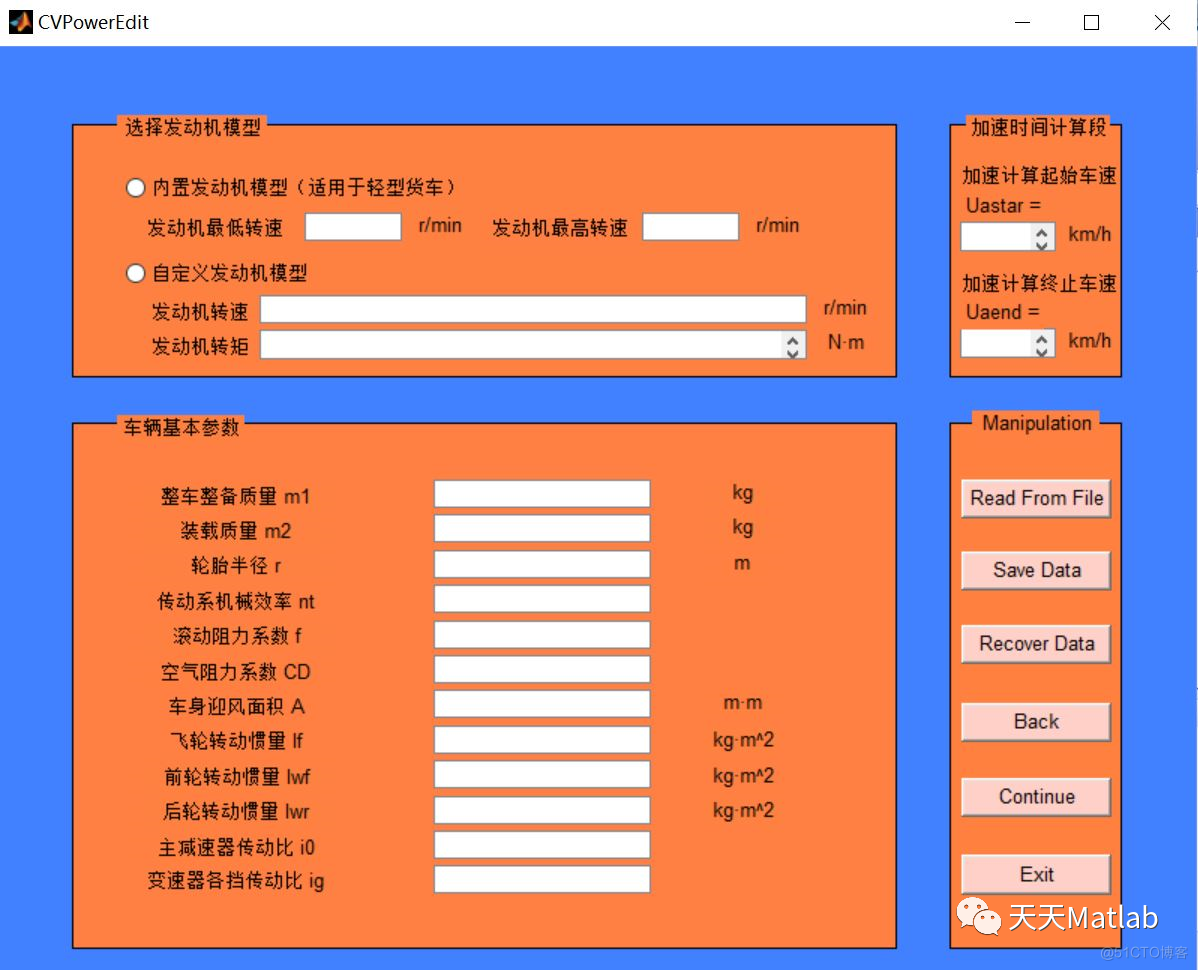
nmin=600;%发动机最低转速(r/min)nmax=4000;%发动机最高转速(r/min)
m1=1800;%整车整备质量(kg)
m2=2000;%装载质量(kg)
r=0.367;%车轮半径(m)
nt=0.85;%传动系机械效率
f=0.013;%滚动阻力系数
CD=0.4;%空气阻力系数
A=6.925;%车身迎风面积(m·m)
If=0.218;%飞轮转动惯量(kg·m·m)
Iwf=1.798;%前轮转动惯量(kg·m·m)
Iwr=3.598;%后轮转动惯量(kg·m·m)
i0=5.83;%主减速器传动比
ig=[5.56 2.769 1.644 1.00 0.793];%变速器各挡传动比
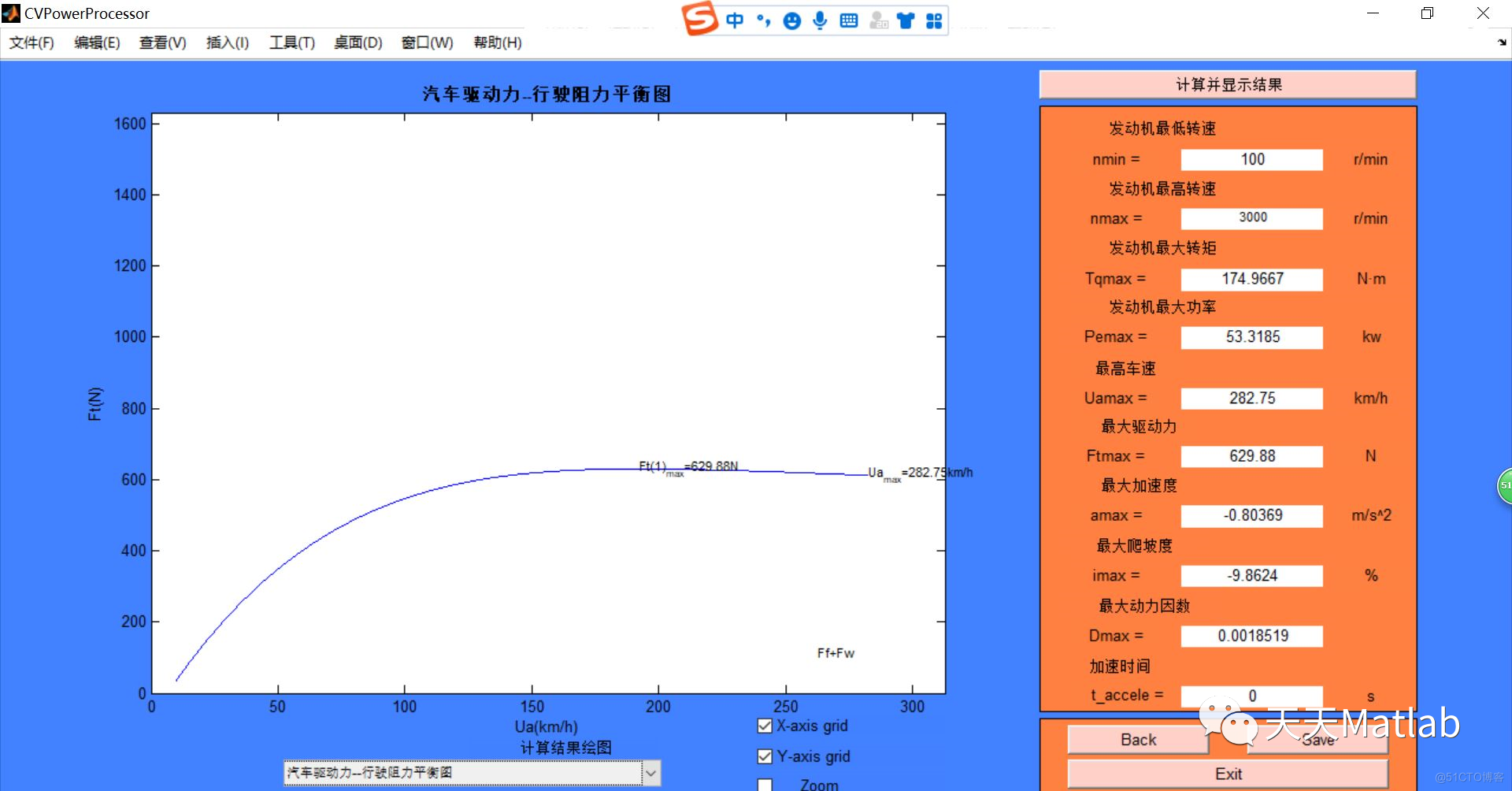
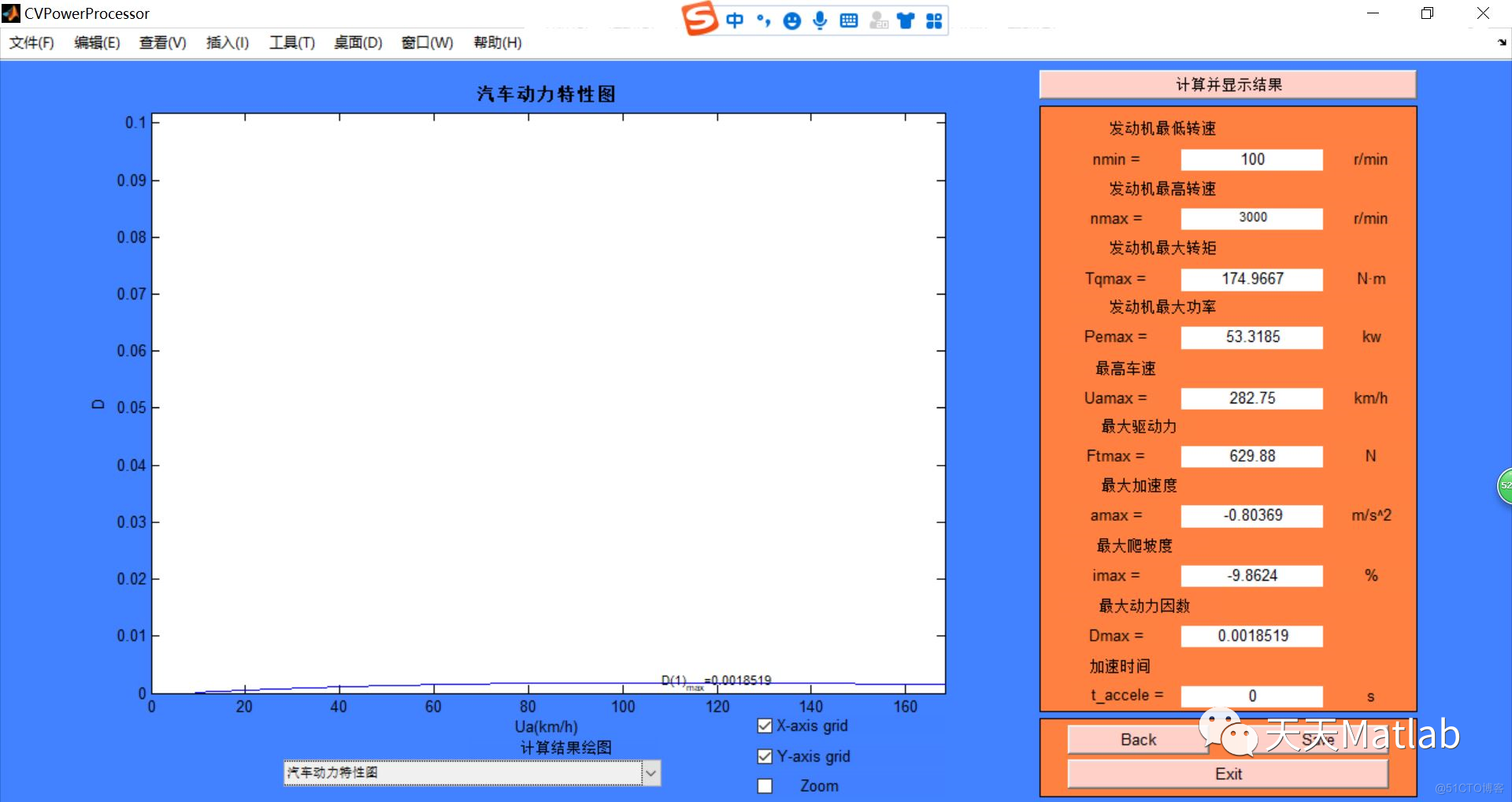
3 仿真结果
 编辑
编辑
 编辑
编辑
 编辑
编辑
4 参考文献
[1]鲍长勇. 汽车线控转向系统动力学分析与控制策略研究. Diss. 中国石油大学(华东).
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。

 编辑
编辑