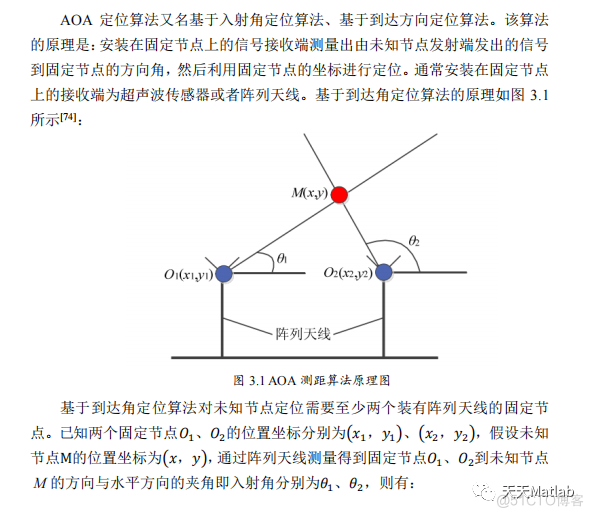
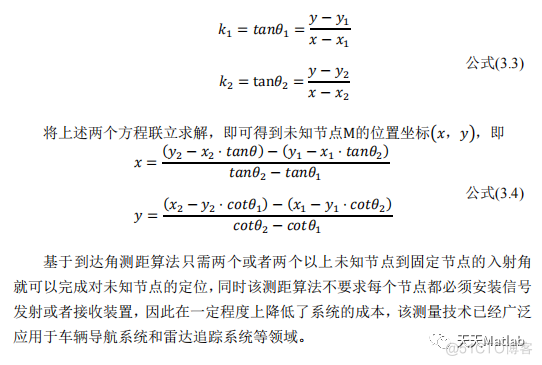
1 简介 编辑 编辑 2 部分代码 clear all; close all; clc; stations = [0 0 0;20 0 0]; %基站位置 X = -100:100; %生成目标位置 Y = X.*sin(X); Z = X+Y; N = length(X); Locations = zeros(N,3); angs = zeros(N,4); for i = 1:
1 简介
 编辑
编辑
 编辑
编辑
2 部分代码
clear all; close all; clc;stations = [0 0 0;20 0 0]; %基站位置
X = -100:100; %生成目标位置
Y = X.*sin(X);
Z = X+Y;
N = length(X);
Locations = zeros(N,3);
angs = zeros(N,4);
for i = 1:N
angs(i,:) = Angs(stations*1e3,[X(i),Y(i),Z(i)]*1e3);
end
for i = 1:N
Locations(i,:) = AOA1(stations*1e3,angs(i,:))/1e3;
end
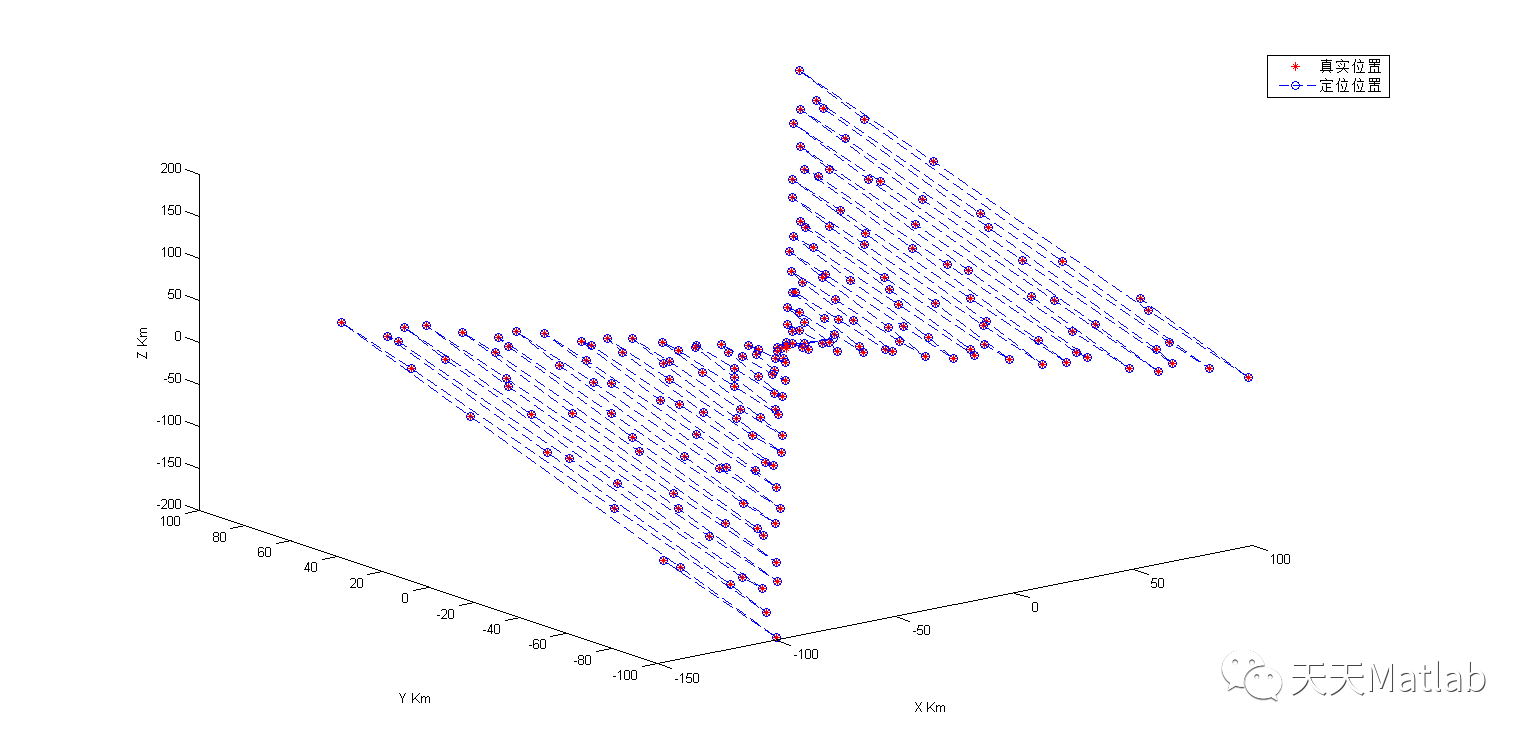
figure(1);
plot3(X,Y,Z,'r*');
hold on;
plot3(Locations(:,1),Locations(:,2),Locations(:,3),'b--o');
legend('真实位置','定位位置');
xlabel('X Km');
ylabel('Y Km');
zlabel('Z Km');
3 仿真结果
 编辑
编辑
4 参考文献
[1]潘雁鹏. 基于时差量测的目标定位与跟踪算法研究[D]. 西安电子科技大学, 2020.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。

 编辑
编辑