1 简介 这是用于无人机的毫米波高度计雷达的简单模拟场景:无人机在空中飞行时,地面为探测对象。 2 部分代码 % % % 1T1R Simulation. % Senario: UAV radar to horizontal ground/slope ground , height me
1 简介
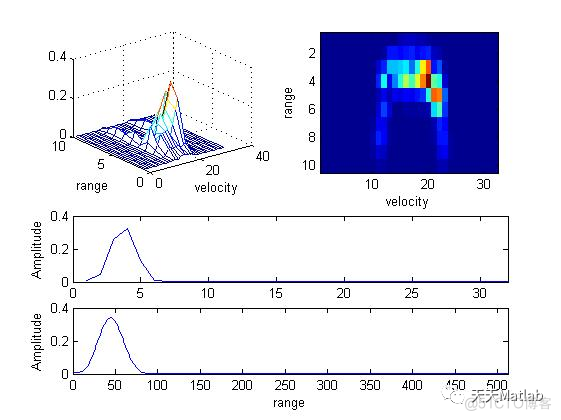
这是用于无人机的毫米波高度计雷达的简单模拟场景:无人机在空中飞行时,地面为探测对象。
2 部分代码
%%
% 1T1R Simulation.
% Senario: UAV radar to horizontal ground/slope ground , height measurement.
clc;clear
%% Radar Parameters
fc = 24e9;
c = physconst('LightSpeed');
lambda = c/fc;
tm = 5e-4; % Chirp Cycle
bw = 300e6; % FMCW Bandwidth
range_max = 5; % Max detection Range 1~100 meters
v_max = 2.5; % Max Velocity
%
range_res = c/2/bw;
sweep_slope = bw/tm;
fr_max = range2beat(range_max,sweep_slope,c);
fd_max = speed2dop(2*v_max,lambda);
fb_max = fr_max+fd_max;
fs = max(2*fb_max,bw);
%%
%% Use Phased Array System Toolbox to generate an FMCW waveform
waveform = phased.FMCWWaveform('SweepTime',tm,'SweepBandwidth',bw,...
'SampleRate',fs);
%%
tx_antenna = phased.IsotropicAntennaElement('FrequencyRange',[23.8e9 24.4e9],'BackBaffled',true);
rx_antenna = phased.IsotropicAntennaElement('FrequencyRange',[23.8e9 24.4e9],'BackBaffled',true);
%%
transmitter = phased.Transmitter('PeakPower',0.001,'Gain',20);
receiver = phased.ReceiverPreamp('Gain',20,'NoiseFigure',8.5,'SampleRate',fs);
txradiator = phased.Radiator('Sensor',tx_antenna,'OperatingFrequency',fc,...
'PropagationSpeed',c);
rxcollector = phased.Collector('Sensor',rx_antenna,'OperatingFrequency',fc,...
'PropagationSpeed',c);
rng(2020);
fs_d = 2500000;
Dn = fix(fs/fs_d);
%%
%% --------------Radar Motion Platform-------------- %%
radar_s = phased.Platform('InitialPosition',[0;0;0],...
'Velocity',[0.05;2.3;-0.04]); %% *********** Set Radar Velocity Here **************
%% Targets ------------- Ground -------------------- %%
target_ypos = -6:0.15:6;
target_num = size(target_ypos,2);
target_xpos = 1.3*ones(1,target_num) + 0*1.1*target_ypos; %% *********** Set Ground Shape Here **************
target_zpos = zeros(1,target_num);
target_pos = [[target_xpos,target_xpos,target_xpos];
[target_ypos,target_ypos,target_ypos];
[target_zpos-0.15,target_zpos,target_zpos+0.155]];
target_num = target_num*3;
target_rcs = 0.02*ones(1,target_num);
targets_vel = [zeros(1,target_num);zeros(1,target_num);zeros(1,target_num)];
targets = phased.RadarTarget('MeanRCS',target_rcs,'PropagationSpeed',c,'OperatingFrequency',fc);
targetmotion = phased.Platform('InitialPosition',target_pos,...
'Velocity',targets_vel);
%%
%% Signal Propogation
% simulation of free space propagtion
channel = phased.FreeSpace('PropagationSpeed',c,...
'OperatingFrequency',fc,'SampleRate',fs,'TwoWayPropagation',true);
%%
%%
% Generate Time Domain Waveforms of Chirps
% xr is the data received at rx array
Nsweep = 32; % Number of Chirps (IF signal) of this simulation
chirp_len = fix(fs_d*waveform.SweepTime);
xr = complex(zeros(chirp_len,1,Nsweep));
disp('The simulation will take some time. Please wait...')
for m = 1:Nsweep
if mod(m,1)==0
disp([num2str(m),'/',num2str(Nsweep)])
end
% Update radar and target positions
[radar_pos,radar_vel] = radar_s(waveform.SweepTime);
[tgt_pos,tgt_vel] = targetmotion(waveform.SweepTime);
[~,tgt_ang] = rangeangle(tgt_pos,radar_pos);
% Transmit FMCW waveform
sig = waveform();
txsig = transmitter(sig);
% Toggle transmit element
txsig = txradiator(txsig,tgt_ang);
% Propagate the signal and reflect off the target
txsig = channel(txsig,radar_pos,tgt_pos,radar_vel,tgt_vel);
txsig = targets(txsig);
% Dechirp the received radar return
rxsig = rxcollector(txsig,tgt_ang);
rxsig = receiver(rxsig);
dechirpsig = dechirp(rxsig,sig);
% Decimate the return to reduce computation requirements
for n = size(xr,2):-1:1
xr(:,n,m) = decimate(dechirpsig(1:chirp_len*Dn,n),Dn,'FIR');
end
end
range_res = range_res*size(dechirpsig,1)/Dn/size(xr,1);
%%
xrv = squeeze(xr);
save('vrv.mat',...
'xrv','fc','fs_d','c','tm','bw','waveform','range_res',...
'Nsweep','chirp_len','Dn','fb_max','lambda',...
'v_max','range_max')
%%
%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Part II: Signal Processing %
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%
if ~exist('xrv')
load('vrv.mat');
end
% FFT points
nfft_r = 2^nextpow2(size(xrv,1));
nfft_d = 2^nextpow2(size(xrv,2));
nfft_mul = 2;
ra_res = range_res*size(xrv,1)/nfft_mul/nfft_r;
% RDM Algorithm
rngdop = phased.RangeDopplerResponse('PropagationSpeed',c,...
'DopplerOutput','Speed','OperatingFrequency',fc,'SampleRate',fs_d,...
'RangeMethod','FFT','PRFSource','Property',...
'RangeWindow','Hann','PRF',1/waveform.SweepTime,...
'SweepSlope',waveform.SweepBandwidth/waveform.SweepTime,...
'RangeFFTLengthSource','Property','RangeFFTLength',nfft_r*nfft_mul,...
'DopplerFFTLengthSource','Property','DopplerFFTLength',nfft_d*nfft_mul,...
'DopplerWindow','Hann');
% RD Map
[resp,r,sp] = rngdop(xrv);
% % Range-Energy Calibration
% for k=size(resp,1)/2+1:size(resp,1)
% resp(k,:,:) = resp(k,:,:) * (k-size(resp,1)/2)^3;
% end
subplot(221);plotResponse(rngdop,squeeze(xrv));axis([-2*v_max 2*v_max 0 range_max-0.05])
%respmap = mag2db(abs(resp));
respmap = abs(resp);
respmap = avg_filter_2D(respmap,1);
subplot(222);mesh(respmap(nfft_r*nfft_mul/2+1:nfft_r*nfft_mul/2+1+30*nfft_mul,...
:))
%nfft_d*nfft_mul/2-12*nfft_mul:nfft_d*nfft_mul/2+12*nfft_mul))
subplot(413);plot(sum(respmap(nfft_r*nfft_mul/2+1:nfft_r*nfft_mul/2+1+30*nfft_mul,...
nfft_d*nfft_mul/2-1:nfft_d*nfft_mul/2+2),2))
3 仿真结果
4 参考文献
[1]黄广超. 毫米波雷达超分辨率成像关键技术研究.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。
