人工智能实验盲目搜索
一、 无信息搜索(盲目搜索)
1.算法原理
1.1 搜索问题的形式化定义
解决搜索问题时,首先需要对搜索问题进行形式化表述。搜索问题从以下几个方面表述:
状态空间:对问题的形式化,表示需要进行搜索的空间
动作:对真正动作的形式化,表示从一个状态到达另一个状态
初始状态:表示当前的状态
目标:表示需要达到的目标的状态
启发方法:用于指挥搜索的前进方向的方法
问题的解:一个从初始状态到达目标状态的动作序列
搜索问题可以用状态空间树表示,每个节点对应着状态空间中的一种状态。节点的父节点表示产生该状态的上一个状态,父节点生成子节点时需要记录生成节点所采取的行动与代价。
搜索算法的性能需要考虑一个方面:
完备性:当问题有解时是否一定能找到解
最优性:搜索策略是否一定能找到最优解
时间复杂度:找到解所需要的时间,又称为搜索代价
空间复杂度:执行搜索过程中需要多少内存空间
1.2 无信息搜索的具体算法
1.2.1 宽度优先搜索
宽度优先搜索用一个先进先出的队列实现,节点的拓展顺序与目标节点的位置无关。从状态空间树上看,宽度优先搜索的拓展顺序是按树的层次顺序来进行的。这样一来,短的路径会在任何比它长的路径之前被遍历,因此宽度优先搜索具有完备性和最优性。
定义

时间复杂度:
空间复杂度:
1.2.2 深度优先搜索
把当前要扩展的状态的后继状态放在边界的最前面,边界上总是扩展最深的那个节点。在状态空间无限或在状态空间有限,但是存在无限的路径(例如存在回路) 的情况下不具有完备性。在状态空间有限,且对重复路径进行剪枝的情况下才有。不具有最优性。
%20%3D%20O%20(%20b%20d%20%2B%201%20)%201%2Bb%2Bb%5E2%2B..)
%20%3D%20O%20(%20b%20d%20%2B%201%20)%20b(b%5Ed-1)%3DO(b%5E%7Bd%2B1%7D))
定义m是遍历过程中最长路径的长度,则有:
时间复杂度:
%20O(b%5Em))
空间复杂度:
%20O(bm))
1.2.3 一致代价搜索
边界中,按路径的成本升序排列,总是扩展成本最低的那条路径。当每种动作的成本是一样的时候,和宽度优先是一样的。假设每个动作的成本都大于某个大于0的常量,所有成本较低的路径都会在成本高的路径之前被扩展。给定成本,该成本的路径数量是有限的;成本小于最优路径的路径数量是有限的,最终,我们可以找到最短的路径,因此具备完备性和最优性。
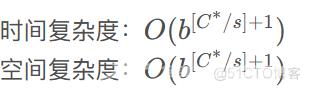
对于一致代价搜索,当最优解的成本为C* ,上述最低代价为 
时间复杂度:
空间复杂度:
1.2.4 深度受限搜索
深度受限搜索是深度优先搜索,但是预先限制了搜索的深度L,因此无限长度的路径不会导致深度优先搜索无法停止的问题。 但只有当解路径的长度 ≤ L 时,才能找到解,故不具有完备性和最优性。
%20O(b%5E%7B%5BC%5E%2Fs%5D%2B1%7D))
时间复杂度:
空间复杂度:
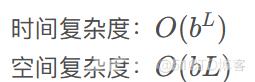
1.2.5 迭代加深搜索
一开始设置深度限制为L = 0,迭代地增加深度限制,对于每个深度限制都进行深度受限搜索 。如果找到解,或者深度受限搜索没有节点可以扩展的时候可以停止当前迭代,并提高深度限制L 。如果没有节点可以被剪掉(深度限制不能再提高)仍然 没有找到解,那么说明已经搜索所有路径,因此这个搜索不存在解。具有完备性,且在每个动作的成本一致时具有最优性。
%20O(b%5EL))
%20O(bL))
1.2.6 双向搜索
同时进行从初始状态向前的搜索和从目标节点向后搜索,在两个搜索在中间相遇时停止搜索。假设两个搜索都使用宽度优先搜索,则具有完备性,在每条边/每个动作的成本一致的情况下具有最优性。
2. 流程图和伪代码
为了便于比较算法差异,我实现了宽度优先搜索和双向搜索两种算法。
2.1 宽度优先搜索

判断队列是否有终点和输出路径较为简单,下面只讨论算法终点部分。
每次取出队列首个节点,记其坐标为(x,y),向上下左右四个方向拓展新的四个节点。拓展节点的方式如下:
input: queue
/* 输入当前节点队列 */
output: queue
/* 输出更新后的队列 */
def expand(queue)
(x,y) = queue.front(); /* 取出队首的节点 */
/* 向上下左右四个方向拓展新的节点 */
expand_node(x+1,y);
expand_node(x-1,y);
expand_node(x,y+1);
expand_node(x,y-1);
/* 将当前节点出队 */
queue.pop();判断具体的节点是否要加入队列时,判断节点位置是否是通路’0’或终点’E’即可。考虑到迷宫四周一圈都是墙壁’1’,所以不需要考虑出界的问题。
input: queue, x, y
/* 输入当前节点队列,要加入的新节点的坐标 */
output: queue
/* 输出更新后的队列 */
def expand_node(queue, x, y)
if (x,y) 处为通路或终点
then
queue.push((x,y))
将(x,y)处变为墙壁完整的源码和详细的文档,上传到了 【WRITE-BUG数字空间】,需要的请自取:
https://www.writebug.com/code/0c802727-c792-11ed-ac02-6479f0e5e323/#