前言
图形相交检测常常用在伤害判定,使用自定义的图形相交检测,可以在一定程度上控制性能。
比如2D格斗游戏中使用的矩形包围盒(AABB),一些动作游戏中常常出现的扇形攻击。
2D的图形相交检测能够满足大部分的需求,且可以拓展成为柱状的3D物体,2D比3D的计算复杂度会低很多,3D的图形检测原理与2D相似,本文会实现几个圆形与其他2D图形的相交检测:
1、圆形与圆形
2、圆形与胶囊体
3、圆形与扇形
4、圆形与凸多边形
5、圆形与AABB
6、圆形与OBB
通过简单化处理,把被判定物都处理成由圆柱或多个圆柱构成的区域,所以只需要考虑圆形与其他形状的相交。
圆形与圆形
两个圆形的相交检测非常简单直观,只需要判断半径只和与距离的大小。
定义圆形区间:
/// <summary>
/// 圆形区间
/// </summary>
public struct CircleArea
{
public Vector2 o;
public float r;
}
o ——圆心坐标
r ——圆半径
相交判断:
/// <summary>
/// 判断圆形与圆形相交
/// </summary>
/// <param name="circleArea"></param>
/// <param name="target"></param>
/// <returns></returns>
public static bool Circle(CircleArea circleArea, CircleArea target)
{
return (circleArea.o - target.o).sqrMagnitude < (circleArea.r + target.r) * (circleArea.r + target.r);
}
分离轴定理
分离轴定理(separating axis theorem, SAT)分离轴定理是指,两个不相交的凸集必然存在一个分离轴,使两个凸集在该轴上的投影是分离的。
判断两个形状是否相交,实际上是判断分离轴是否能把两个形状分离。若存在分离轴能使两个图形分离,则这两个图形是分离的。
基于以上理论,寻找分离轴是我们要做的工作,重新考虑两个圆形的相交检测,实际上我们做的是把圆心连线的方向作为分离轴:
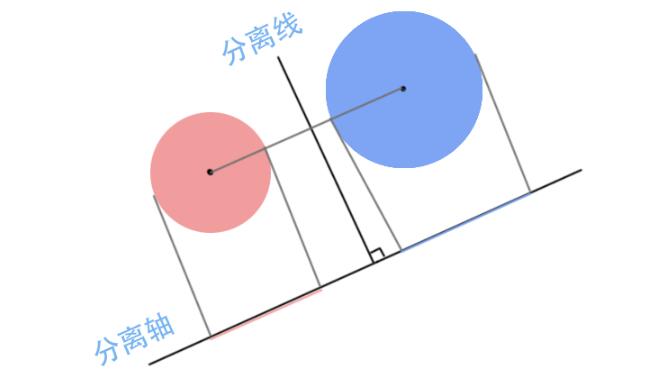
上图中两图形的投影在分离轴上是分离的,存在分离线将两者隔开,于是我们可以断定两图形是分离的。
胶囊体的本质
定义一个线段 u,距离 d。胶囊体实际上是与线段 u 的最短距离小于 d 的点的集合。判断一个点 x 处于胶囊体内部,就是判断点与线段的距离。

求点 x 与线段 u 最短距离的过程是:
1、求出点 x 在线段 u 所在直线上的投影点 P;
2、将投影点 P 限制在线段的范围内(如右图中投影点不在线段内,则限定到线段内);
3、x 与 P 的距离即为所求;
/// <summary>
/// 线段与点的最短距离。
/// </summary>
/// <param name="x0">线段起点</param>
/// <param name="u">线段向量</param>
/// <param name="x">求解点</param>
/// <returns></returns>
public static float SqrDistanceBetweenSegmentAndPoint(Vector2 x0, Vector2 u, Vector2 x)
{
float t = Vector2.Dot(x - x0, u) / u.sqrMagnitude;
return (x - (x0 + Mathf.Clamp01(t) * u)).sqrMagnitude;
}
为避免开方计算,结果使用距离的平方。
圆形与胶囊体
分离轴是线段上距离圆心最近的点P与圆心所在方向。
定义胶囊体:
/// <summary>
/// 胶囊体
/// </summary>
public struct CapsuleArea
{
public Vector2 X0;
public Vector2 U;
public float d;
}
相交判断:
/// <summary>
/// 判断胶囊体与圆形相交
/// </summary>
/// <param name="capsuleArea"></param>
/// <param name="circleArea"></param>
/// <returns></returns>
public static bool Capsule(CapsuleArea capsuleArea, CircleArea circleArea)
{
float sqrD = SegmentPointSqrDistance(capsuleArea.X0, capsuleArea.U, circleArea.o);
return sqrD < (circleArea.r + capsuleArea.d) * (circleArea.r + capsuleArea.d);
}
圆形与扇形
当扇形角度大于180度时,就不再是凸多边形了,不能适用于分离轴理论。我们可以找出相交时圆心的所有可能区域,并把区域划分成可以简单验证的几个区域,逐个试验。
这里共划分了2个区间
1、半径为两者半径和的扇形区间,角度方向同扇形。验证方法是;验证距离与夹角。
2、扇形边为轴,圆形半径为大小组成的胶囊体空间,由于扇形的对称性,我们可以通过把圆心映射到一侧,从而只需要计算1条边。
定义扇形:
/// <summary>
/// 扇形区间。
/// </summary>
public struct SectorArea
{
public Vector2 o;
public float r;
public Vector2 direction;
public float angle;
}
相交检测:
/// <summary>
/// 判断圆形与扇形相交。
/// </summary>
/// <param name="sectorArea"></param>
/// <param name="target"></param>
/// <returns></returns>
public static bool Sector(SectorArea sectorArea, CircleArea target)
{
Vector2 tempDistance = target.o - sectorArea.o;
float halfAngle = Mathf.Deg2Rad * sectorArea.angle / 2;
if (tempDistance.sqrMagnitude < (sectorArea.r + target.r) * (sectorArea.r + target.r))
{
if (Vector3.Angle(tempDistance, sectorArea.direction) < sectorArea.angle / 2)
{
return true;
}
else
{
Vector2 targetInSectorAxis = new Vector2(Vector2.Dot(tempDistance,
sectorArea.direction), Mathf.Abs(Vector2.Dot(tempDistance, new Vector2(-sectorArea.direction.y, sectorArea.direction.x))));
Vector2 directionInSectorAxis = sectorArea.r * new Vector2(Mathf.Cos(halfAngle), Mathf.Sin(halfAngle));
return SegmentPointSqrDistance(Vector2.zero, directionInSectorAxis, targetInSectorAxis) <= target.r * target.r;
}
}
return false;
}
圆形与凸多边形
定义多边形:
/// <summary>
/// 多边形区域。
/// </summary>
public struct PolygonArea
{
public Vector2[] vertexes;
}
相交检测:
/// <summary>
/// 判断多边形与圆形相交
/// </summary>
/// <param name="polygonArea"></param>
/// <param name="target"></param>
/// <returns></returns>
public static bool PolygonS(PolygonArea polygonArea, CircleArea target)
{
if (polygonArea.vertexes.Length < 3)
{
Debug.Log("多边形边数小于3.");
return false;
}
#region 定义临时变量
//圆心
Vector2 circleCenter = target.o;
//半径的平方
float sqrR = target.r * target.r;
//多边形顶点
Vector2[] polygonVertexes = polygonArea.vertexes;
//圆心指向顶点的向量数组
Vector2[] directionBetweenCenterAndVertexes = new Vector2[polygonArea.vertexes.Length];
//多边形的边
Vector2[] polygonEdges = new Vector2[polygonArea.vertexes.Length];
for (int i = 0; i < polygonArea.vertexes.Length; i++)
{
directionBetweenCenterAndVertexes[i] = polygonVertexes[i] - circleCenter;
polygonEdges[i] = polygonVertexes[i] - polygonVertexes[(i + 1)% polygonArea.vertexes.Length];
}
#endregion
#region 以下为圆心处于多边形内的判断。
//总夹角
float totalAngle = Vector2.SignedAngle(directionBetweenCenterAndVertexes[polygonVertexes.Length - 1], directionBetweenCenterAndVertexes[0]);
for (int i = 0; i < polygonVertexes.Length - 1; i++)
totalAngle += Vector2.SignedAngle(directionBetweenCenterAndVertexes[i], directionBetweenCenterAndVertexes[i + 1]);
if (Mathf.Abs(Mathf.Abs(totalAngle) - 360f) < 0.1f)
return true;
#endregion
#region 以下为多边形的边与圆形相交的判断。
for (int i = 0; i < polygonEdges.Length; i++)
if (SegmentPointSqrDistance(polygonVertexes[i], polygonEdges[i], circleCenter) < sqrR)
return true;
#endregion
return false;
}
圆形与AABB
定义AABB:
/// <summary>
/// AABB区域
/// </summary>
public struct AABBArea
{
public Vector2 center;
public Vector2 extents;
}
AABB是凸多边形的特例,是长宽边分别与X/Y轴平行的矩形,这里我们要充分的利用他的对称性。
1 利用对称性将目标圆心映射到,以AABB中心为原点、两边为坐标轴的坐标系,的第一象限
2 将目标圆心映射到,以AABB第一象限角点为原点、两边为坐标轴的坐标系,的第一象限
3 最后只需要判断圆形半径与步骤2中映射点的向量大小
相交检测:
/// <summary>
/// 判断AABB与圆形相交
/// </summary>
/// <param name="aABBArea"></param>
/// <param name="target"></param>
/// <returns></returns>
public static bool AABB(AABBArea aABBArea, CircleArea target)
{
Vector2 v = Vector2.Max(aABBArea.center - target.o, -(aABBArea.center - target.o));
Vector2 u = Vector2.Max(v - aABBArea.extents,Vector2.zero);
return u.sqrMagnitude < target.r * target.r;
}
圆形与OBB
定义OBB:
/// <summary>
/// OBB区域
/// </summary>
public struct OBBArea
{
public Vector2 center;
public Vector2 extents;
public float angle;
}
OBB相对于AABB,矩形边不与坐标轴重合,对于它和圆形的相交检测只需要把圆形旋转到OBB边所在坐标系中,剩下的步骤与AABB的相同。
相交检测:
/// <summary>
/// 判断OBB与圆形相交
/// </summary>
/// <param name="oBBArea"></param>
/// <param name="target"></param>
/// <returns></returns>
public static bool OBB(OBBArea oBBArea, CircleArea target)
{
Vector2 p = oBBArea.center - target.o;
p = Quaternion.AngleAxis(-oBBArea.angle, Vector3.forward) * p;
Vector2 v = Vector2.Max(p, -p);
Vector2 u = Vector2.Max(v - oBBArea.extents, Vector2.zero);
return u.sqrMagnitude < target.r * target.r;
}
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持易盾网络。