预习了一点图论的算法,记录一下:
我将分为三部分记录:
1.概念&一笔画问题
2.最短路算法
3.最小生成树算法
1st. 一笔画问题
首先明确以下几个概念:
1、欧拉通路:恰好通过图中的每条边仅一次的通路。
2、欧拉回路:是欧拉路径且起点和终点是同一个点。
3、欧拉图:存在欧拉回路的图。
关于一笔画问题的定理:
存在欧拉路的条件:图是连通的,且存在0个或2个奇点。 如果存在2个奇点,那么这两个奇点一定是这个图的起点和终点。
如果存在欧拉回路的话,就不会有奇点。
其实我们要探究的一笔画问题就是探究是否存在欧拉回路
——“问题来了,怎样求得欧拉路径呢?”
——“用DFS!”
首先确定起点和终点,也就是输入再存储这张图,记录每个点的度。然后找有没有奇点,如果有的话,就将其当成起点或终点。如果没有,就可以从任何一个点开始。
之后就用DFS找到欧拉回路就行了。不多说,直接上代码!
1 #include<iostream> 2 #define N 1001 3 using namespace std; 4 int g[N][N];//存图 5 int du[N];//记录每个点的度 6 int lu[N];//记录最后要输出的点的顺序 7 int n,cnt,e; 8 void dfs_lu(int i) 9 { 10 for(int j=1;j<=n;j++) 11 if(g[i][j]==1) 12 { 13 g[i][j]=0; 14 g[j][i]=0; 15 dfs_lu(j); 16 } 17 lu[cnt++]=i; 18 } 19 int main() 20 { 21 cin>>n>>e; 22 int x,y; 23 for(int i=1;i<=e;i++) 24 { 25 cin>>x>>y; 26 g[x][y]=1; 27 g[y][x]=1; 28 du[x]++; 29 du[y]++; 30 } 31 int start=5;//如果没有环(即没有奇点)就直接从1开始,当然从任何一个点开始都是可以的!!! 32 for(int i=1;i<=n;i++) 33 { 34 if(du[i]%2==1) 35 start=i;//记录起点 36 break; 37 } 38 cnt=0; 39 dfs_lu(start); 40 for(int i=0;i<cnt;i++) 41 { 42 cout<<lu[i]<<" "; 43 } 44 return 0; 45 }
有欧拉图,就还会有哈密顿图:
定义:
哈密尔顿通路:通过图中每个顶点仅一次的通路。
哈密尔顿回路:通过图中每个顶点仅一次的回路。
哈密尔顿图:存在哈密尔顿回路的图。
其实哈密顿图和欧拉图的区别就是一个是经过所有的边,一个是经过所有的点
其实不准确,因为只要经过所有的边,就一定会经过所有的点,但是经过所有的点不一定经过所有的边,所以他们的区别实际上是:
一个是要经过所有的点且经过所有的边,一个是经过所有的点但不用非要经过所有的边
——————————————————手动分隔线————————————————————————
2nd. 最短路问题
有四种方法,分别是:floyed算法,Dijkstra算法,Bellman-Ford算法,SPFA算法
我们明确一下这些方法各自的最优问题:
对于多源汇最短路问题,最优解是floyed算法
对于单源最短路:
如果所有边权都是正数且是一个稠密图(边数跟点数的平方是一个等级),首选朴素Dijkstra算法
如果所有边权都是正数且是一个稀疏图(边数跟点的个数是一个等级),首选堆优化版的Dijkstra算法
如果存在负权边最好使用SPFA算法
如果存在负权边且限制边数不能超过给定的数k,最好用Bellman-ford算法
1.floyed算法:
首先记录每一条边,设d[i][j]代表从i到j的最短距离,画一个图看看:
 对于一整个图,我们都可以将其分解为以上的小部分,从1到3有两种选择,一种是从1到2,再从2到3,还有一种就是直接从1到3,现在我们已知每条边的边权,那就计算一下两条路径那条更短就去哪条
对于一整个图,我们都可以将其分解为以上的小部分,从1到3有两种选择,一种是从1到2,再从2到3,还有一种就是直接从1到3,现在我们已知每条边的边权,那就计算一下两条路径那条更短就去哪条
再比如下面的图:
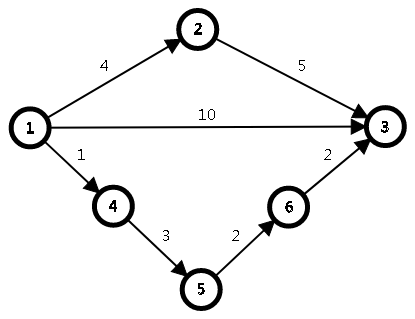
显然,对于这张图,我们知道1直接到5是没有路径的,所以它们之间的最短距离d[1][5]=min(d[1][4]+d[4][5],d[1][5])=min(1+3,∞)=4
我们也可以由此得出1到6的最短路径长度,1到3的最短路径长度,因此这种方法可以实现求图上任何两点之间的最短路径长度
所以其实我认为它跟DP是有写相同之处的,比如状态转移:
1 for(int k=1;k<=n;k++) 2 for(int i=1;i<=n;i++) 3 for(int j=1;j<=n;j++) 4 if(d[i][k]+d[k][j]<d[i][j]){ 5 d[i][j]=d[i][k]+d[k][j]; 6 }
相似之处还有就是他们都需要初始化,比如它的初始化就是:
d[ i ][ i ]=0,也就是说自己到自己的距离是0
d[ i ][ j ]= 边权,i 与 j 有直接相连的边,那这条边的长度就是它的边权
d[ i ][ j ]= 0x7f,i 与 j 无直接相连的边,这条边的长度定义为一个超级大的数,只有这样我们才能筛选出最短的那条边
(当然,用memset固然简洁明了,但是在处理0和-1之外的赋值操作时会有意想不到的结果......所以还是老老实实地用循环嵌套吧!!!)
那就直接上题!
输入顶点数 m 和边数 n,任意两点的之间的距离w都<=1000,再输入p,q两点标号,接下来输入m行,每行代表一条边的起点,终点和权值,输出p,q两点之间路径长度的最小
思路就是我刚才说的,直接上代码吧!!
1 #include<iostream> 2 #include<cstdio> 3 #include<cstring> 4 using namespace std; 5 int d[101][101]; 6 int main() 7 { 8 int n,m,p,q; 9 cin>>n>>m>>p>>q; 10 for(int i=1;i<=n;i++) 11 { 12 for(int j=1;j<=n;j++) 13 { 14 d[i][j]=1001; 15 } 16 } 17 //初始化将每条边变成一个很大的数 18 for(int i=1;i<=n;i++) 19 { 20 d[i][i]=0; 21 } 22 //自己到自己的长度是0 23 int i,j,len; 24 for(int ha=1;ha<=m;ha++) 25 { 26 cin>>i>>j>>len; 27 d[i][j]=len; 28 d[j][i]=len; 29 }//输入边的长度 30 for(int k=1;k<=n;k++) 31 { 32 for(int i=1;i<=n;i++) 33 { 34 for(int j=1;j<=n;j++) 35 { 36 if(d[i][k]+d[k][j]<d[i][j]) 37 { 38 d[i][j]=d[i][k]+d[k][j]; 39 } 40 } 41 } 42 } 43 //寻找最短距离 44 cout<<d[p][q]; 45 return 0; 46 }
——————————————————手动分隔线—————————————————————
2、Bellman-Ford算法
首先明确几个概念:
什么是松弛函数?
现在有一个图,对于边集合 中任意边,
表示顶点

则表示从起点
表示从顶点
所以松弛函数像刚才我们在讨论floyed算法是所做的操作一样:
若存在边
则更新
其实就是更新成较短的路径的长度呗,这就是三角变换
初始化的操作也是一样的:
现在我们将对边集合
那我们其实不难发现,在一个图中,有时只使用一次松弛操作就可以实现找到最优解,比如下面这张图:
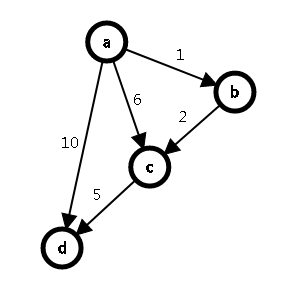 我们如果按照:w(a,b) w(b,c) w(c d) 的顺序进行松弛:
我们如果按照:w(a,b) w(b,c) w(c d) 的顺序进行松弛:
对边 执行松弛函数,则
对边 执行松弛函数,则
对边 执行松弛函数,则
那我们只要通过一次迭代操作就可以得到最优解了!
BUT!
如果我的运气很不好,(实际上是最坏),那一次就解决问题的概率其实不大,所以我至少要进行三次操作(由于过程太麻烦,这里就不过多赘叙)
那么发现规律:
最多要进行m(顶点数)-1 次操作,就能让所有的点确定,
即对于未确定的顶点,每次对边集进行一次操作,都至少会增加一个确定的点!
那现在我来推理一下: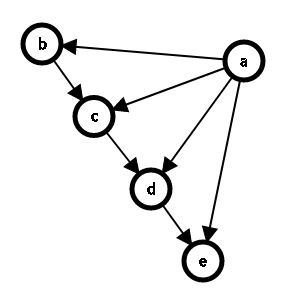
首先进行第一次迭代,那么b点一定会被确定,因为b只能从a点过去。
在第二次迭代的时候,由于我们确定了b点和a点,要不就是从a到b到c,要不就是直接从a到c 所以与a,b构成三角形的点c一定会被确定。
下面依次类推,都至少会确定一个点,证毕。
OK!现在我们就可以进入正题了——谜一样的 Bellman-Ford(转载,不喜勿喷)
但是我们要有一点前提:
就是不能允许负权回路出现,因为如果有负权回路,那么这个最短路就会一直被更新(一直减减减),那就无法在 m-1 次操作内运行出来
(介绍一下啥是负权回路:一个回路上所有边权相加小于零)
因此Bellman-Ford算法就有了另一个作用:
判断图中是否有负权回路出现
代码如下:
1 #include <iostream> 2 #include <cstdio> 3 #define INF 2147483647 4 #define ll long long 5 using namespace std; 6 const int maxn=5005; 7 ll dis[10005]; 8 int from[maxn],to[maxn],len[maxn]; 9 int n,m,s; 10 void bellman_ford() 11 { 12 int k; 13 for(k=1;k<=n-1;k++) 14 {//做n-1次松弛,因为任意两点之间的最短路最多包含n-1条边 15 int flag=0; 16 for(int i=1;i<=m;i++) 17 { 18 if(dis[to[i]]>dis[from[i]]+len[i]) 19 { 20 dis[to[i]]=dis[from[i]]+len[i]; 21 flag=1; 22 } 23 } 24 if(!flag) break;//加不加都行(能省点时间) 25 } 26 } 27 28 int main() 29 { 30 31 scanf("%d %d %d",&n,&m,&s); 32 for(int i=1;i<=n;i++) 33 { 34 dis[i]=INF; 35 } 36 dis[s]=0; 37 for(int i=1;i<=m;i++) 38 { 39 scanf("%d %d %d",&from[i],&to[i],&len[i]); 40 } 41 bellman_ford(); 42 for(int i=1;i<=n;i++) 43 { 44 printf("%d ",dis[i]);//从起点出发到每个点的距离 45 } 46 return 0; 47 }
——————————————————手动分割线——————————————————
三、SPFA
思想跟Bellman-Ford算法其实几乎一样,唯一的区别就是人家更牛了!!!
由于我不知道Bellman-Ford要进行多少次迭代,所以要试m-1次,那就很不好,所以SPFA就成功地解决了这个问题:
初始时我们将起点加入队列。每次从队列中取出一个元素,并对所有与它相邻的点进行修改,若某个相邻的点修改成功,则将其入队。直到队列为空时,也就是没法再修改的时候,算法结束。
代码实现:
1 d = ∞,让队列Q初始化为空 2 d[S]=0,Q.in(S)//让起点入队 3 while(!Q.empty()) 4 { 5 u=Q.out();//让他出队 6 for(所有的边w(u,v)) 7 if(d[v]>d[u]+len(u,v))//让牵扯到的点全都进队 8 { 9 d[v]=d[u]+len(u,v); 10 if(v不在队内) Q.in(v); 11 } 12 }
所以其实他的特点就和BFS挺像,不同的是:
BFS每个点只能遍历一次,但是SPFA可以让某些点在队里队外反复横跳(来回进出)
代码模板如下:(检验有没有负边权)
1 #include <iostream> 2 #include <cstdio> 3 #include <cstring> 4 #include <cmath> 5 #include <queue> 6 #include <algorithm> 7 #define INF 0x3f3f3f3f 8 9 using namespace std; 10 const int MAXN = 5500; 11 int n,m,w; 12 struct Edge 13 { 14 int v,w,next; 15 }edge[MAXN]; 16 17 int head[MAXN],dis[MAXN],judge[MAXN],t; 18 19 void Init() 20 { 21 memset(head,-1,sizeof(head)); 22 t = 0; 23 } 24 void Add_edge(int u,int v,int w) 25 { 26 edge[t].v=v; 27 edge[t].w=w; 28 edge[t].next=head[u]; 29 head[u]=t++; 30 } 31 32 bool SPFA() 33 { 34 int mark[MAXN];//记录每个点如队列的次数 35 for(int i= 1;i<=n;i++) 36 { 37 mark[i]=0; 38 dis[i]=INF; 39 judge[i]=0; 40 } 41 queue<int>q; 42 q.push(1); //我们只需要判断负环,随便找一个起点就好 43 dis[1]=0; 44 judge[1]=1;//入队列 45 mark[1]++; 46 while(!q.empty()) 47 { 48 int u=q.front(); 49 q.pop(); 50 judge[u]=0;//出队列 51 for(int i=head[u];i!=-1;i=edge[i].next) 52 { 53 int v=edge[i].v; 54 if(dis[v]>dis[u]+edge[i].w) 55 { 56 dis[v]=dis[u]+edge[i].w; 57 if(!judge[v])//有关联的通通入列 58 { 59 q.push(v); 60 mark[v]++; 61 judge[v]=1; 62 } 63 if(mark[v]>=n)//如果不存在负环,那么最多更新n-1次就可以得到最终的答案,因为一次最少更新一个节点,那么如果出现了更新n次,那么就一定出现了负环 64 return false; 65 } 66 } 67 } 68 return true; 69 } 70 int main() 71 { 72 int T; 73 scanf("%d",&T); 74 while(T--) 75 { 76 Init(); 77 int u,v,z; 78 scanf("%d%d%d",&n,&m,&w);//要求有m个正权边,w个负权边 79 for(int i = 0;i < m;i ++) 80 { 81 scanf("%d%d%d",&u,&v,&z); 82 Add_edge(u,v,z); 83 Add_edge(v,u,z); 84 } 85 for(int i=0;i<w;i++) 86 { 87 scanf("%d%d%d",&u,&v,&z); 88 Add_edge(u,v,-z); 89 } 90 if(!SPFA()) 91 { 92 printf("YES\n"); 93 } 94 else 95 { 96 printf("NO\n"); 97 } 98 } 99 return 0; 100 }
还有就是找最短路径的:
#include<iostream> #include<cstdio> #include<cstring> using namespace std; const int N = 2030, M = N * 50; //N为顶点数,M为边数 //数组构造邻接表, n为定点数,m为边数 int n, m int h[N], e[M], w[M], ne[M], idx; int dist[N]; queue<int> q; bool st[N]; // 添加一条边a->b,边权为c void add_edge(int a,int b,int c) { //e[idx]指的是编号为idx的边的去向为何处,h[a]存储的是从a出发的所有边的单链表表头 e[idx]=b; w[idx]=c; ne[idx]=h[a]; h[a]=idx++; } void spfa() // 求1号点到n号点的最短路距离 { memset(dist, 0x3f, sizeof dist); //0x3f代表最大值,最小值可用0xcf dist[1] = 0; q.push(1); st[1] = true; while (q.size()) //while循环控制出队 { int t = q.front(); q.pop(); st[t] = false; for (int i = h[t]; i != -1; i = ne[i]) //for循环控制入队+更新 { int j = e[i]; if (dist[j] > dist[t] + w[i]) { dist[j] = dist[t] + w[i]; // cnt[j] = cnt[t] + 1; // 用于判断是否存在负环 if (!st[j]) // 如果队列中已存在j,则不需要将j重复插入 { q.push(j); st[j] = true; } // if(cnt[j] >= n) return true; // 用于判断是否存在负环 } } } } int main() { memset(h,-1,sizeof(h)); ... //需先通过add_edge函数,采取邻接表的方式构造好图 spfa(); }
——————————————————手动分隔线————————————————————————
四、Dijkstra算法
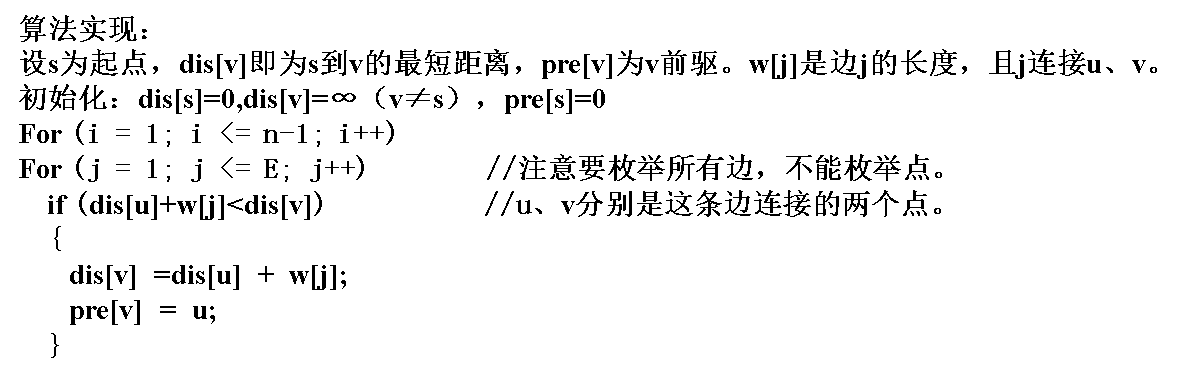
设起点为s,dis[v]表示从起点s到点v的最短路径,path[v]表示v的前驱结点(便于最后输出路径)
首先初始化:dis[v]等于正无穷(或是一个超大的数),dis[s]等于0(其实任何一个结点到自己的距离都初始化为0),path[s]=0(也就是起点没有前驱)
然后在所有点中找到dis最短的(即到原点距离最近的),并将其标记成已经确定的最短路径。(这里视作u)
接着通过for循环找到所有与u相连的、未被确定为最短路径的点v,通过三角变换,更新新的路径:
1 if(dis[u]+w[u][v]<dis[v]) 2 { 3 dis[v]=dis[u]+w[u][v];//进行更新 4 path[v]=u;//记录前驱 5 }
但是用这玩意有个前提:没有负权边(很好理解对吧)
完整代码:
1 #include<iostream> 2 #include<cstring> 3 #include<cstdio> 4 using namespace std; 5 const int maxn=101; 6 int judge[maxn];//记录这个点是否已经用过了 7 int a[maxn][maxn];//表示两个点之间的距离 8 int dis[maxn];//到起点的距离 9 int path[maxn];//前驱 10 int n,m,start; 11 const int chaojida=99999; 12 void init()//准备操作 13 { 14 cin>>n>>m>>start; 15 int x,y,len; 16 for(int i=1;i<=n;i++) 17 { 18 for(int j=1;j<=n;j++) 19 { 20 if(j==i) a[i][j]=0; 21 else a[i][j]=chaojida; 22 } 23 } 24 //第一步:初始化 25 //将所有的距离(出自己以外)都设为一个超级大的数,自己到自己的距离是0 26 for(int i=1;i<=m;i++) 27 { 28 cin>>x>>y>>len; 29 a[x][y]=len; 30 a[y][x]=len; 31 } 32 //读取输入的信息,用给出的条件(起点,终点和距离)更新原始数组 33 } 34 void dijkstra(int s) 35 { 36 for(int i=1;i<=n;i++) 37 { 38 dis[i]=chaojida;//目前,每个点到起点的距离都超级大 39 judge[i]=false;//都还没被用过 40 }//初始化 41 dis[s]=0;//还是初始化(起点到自己的距离是0 42 for (int i=1;i<=n;i++) 43 { 44 int mind=chaojida; 45 int k;//用来记录准备放入集合1的点 46 for(int j=1;j<=n;j++) //查找集合2中d[]最小的点 47 { 48 if((!judge[j])&&(dis[j]<mind)) 49 { 50 mind=dis[j];//更新最小值,以供后面比较 51 k=j;//最小的点是k 52 } 53 if(mind==chaojida) 54 { 55 break; //更新结点求完了 56 } 57 judge[k]=true; 58 }// 加入集合1 59 for(int j=1;j<=n;j++) //修改集合2中的d[j] 60 { 61 if((!judge[j])&&(dis[k]+a[k][j]<dis[j])) 62 { 63 dis[j]=dis[k]+a[k][j]; 64 path[j]=k; 65 } 66 } 67 } 68 } 69 void search(int x) 70 { 71 if(x!=start) 72 { 73 search(path[x]); 74 } 75 cout<<x<<' '; 76 }//便于最后输出前缀 77 void write() 78 { 79 cout<<start<<"到其余各点的最短距离是:"<<endl; 80 for(int i=1;i<=n;i++) 81 { 82 if(i!=start) 83 { 84 if(dis[i]==chaojida) cout<<i<<"不可达!"<<endl; 85 else 86 { 87 cout<<i<<"的最短距离:"<<dis[i] <<",依次经过的点是:"; 88 search(path[i]); 89 cout<<i<<endl; 90 } 91 } 92 } 93 }//输出应题目要求 94 int main() 95 { 96 init(); 97 dijkstra(start); 98 write(); 99 return 0; 100 }
正好凑成一百行!!!
————————————————————纯手动分隔线——————————————————————
3rd. 最小生成树算法
众所周知,有N个点,用N-1条边连将所有的点连接成一个连通块,形成的图形只可能是树,没有别的可能。(哈哈哈,这就不用解释了吧)
所以我们就引出了最小生成树的概念:
有一个n个点的图,这个图有至少n-1条变。现在要从里面挑出n-1条边,使其连接所有的点,而且这些边权之和是最小的,这就是最小生成树。
一. Prim算法
我们可以通过染色的方式跟好的理解一下:
初始时我们将所有点都染成蓝色(蓝色代表还没有被选中,白色代表已经被选入生成的树中),我们每次都会将一个点选入最小生成树,这个点有以下几个前提:
1.未被选中过、2.与上一个选中的点相连且边权是上一个点连接的所有边中最短的。
这样一直选,直到所有的点都被选中为止
算法描述:
以1为起点生成最小生成树,min[v]表示蓝点v与白点相连的最小边权。
MST表示最小生成树的权值之和。
a)初始化:min[v]= ∞(v≠1); min[1]=0;MST=0;
b)for (i = 1; i<= n; i++)
1.寻找min[u]最小的蓝点u。
2.将u标记为白点
3.MST+=min[u]
4.for 与白点u相连的所有蓝点v
if (w[u][v]<min[v])
min[v]=w[u][v];
c)算法结束: MST即为最小生成树的权值之和
代码实现:
1 #include<iostream> 2 #include<cstdio> 3 #include<cstring> 4 using namespace std; 5 int juzhen[101][101]; //邻接矩阵 6 int minn[101]; //minn[i]存放蓝点i与白点相连的最小边权 7 bool judge[101]; 8 //judge[i]=True,表示顶点i还未加入到生成树中 9 //judge[i]=False,表示顶点i已加入到生成树中 10 int n,i,j; 11 int main() 12 { 13 cin>>n; 14 for(i=1;i<=n;i++) 15 { 16 for(j=1;j<=n;j++) 17 { 18 cin>>juzhen[i][j]; 19 } 20 } 21 memset(minn,0x7f,sizeof(minn)); //初始化为maxint 22 minn[1]=0; 23 memset(judge,1,sizeof(judge));//初始化为True,表示所有顶点为蓝点 24 for(i=1;i<=n;i++) 25 { 26 int k=0; 27 for(j=1;j=n;j++) //找一个与白点相连的权值最小的蓝点k 28 { 29 if(judge[j]&&(minn[j]<minn[k])) 30 { 31 k=j; 32 } 33 } 34 judge[k]=false; //蓝点k加入生成树,标记为白点 35 for(j=1;j<=n;j++) //修改与k相连的所有蓝点 36 { 37 if(judge[j]&&(juzhen[k][j]<minn[j])) 38 { 39 minn[j]=juzhen[k][j]; 40 } 41 } 42 } 43 int sum=0; 44 for(i=1;i<=n;i++) //累加权值 45 { 46 sum+=minn[i]; 47 } 48 cout<<sum; 49 return 0; 50 }
_______________________________纯手动分隔线——————————————————————
最后一个算法:
二、Kruskal算法
(Tips:需要了解并查集算法,可自行去看下一个博客——并查集)
Kruskal算法将一个连通块当做一个集合。Kruskal首先将所有的边按从小到大顺序排序(一般使用快排),并认为每一个点都是孤立的,分属于n个独立的集合。然后按顺序枚举每一条边。如果这条边连接着两个不同的集合,那么就把这条边加入最小生成树,这两个不同的集合就合并成了一个集合;如果这条边连接的两个点属于同一集合,就跳过。直到选取了n-1条边为止。
当然,体现并查集思想的地方就是首先将每一个点看作一个集合,再将选中的那条边的两个顶点合并成一个集合,下次的找遍的时边时候判断边的两个顶点是不是在集合里就行了。
算法描述:
1、初始化并查集。father[x]=x。
2、tot=0
3、将所有边用快排从小到大排序。
4、计数器 k=0;
5、for(i=1; i<=M; i++) //循环所有已从小到大排序的边
if 这是一条u,v不属于同一集合的边(u,v)(因为已经排序,所以必为最小)
begin
①合并u,v所在的集合,相当于把边(u,v)加入最小生成树。
②tot=tot+W(u,v)
③k++
④如果k=n-1,说明最小生成树已经生成,则break;
end;
6. 结束,tot即为最小生成树的总权值之和。
代码实现:
1 #include<iostream> 2 #include<cstdio> 3 #include<algorithm> 4 using namespace std; 5 int n,m,tot=0,k=0;//n端点总数,m边数,tot记录最终答案,k已经连接了多少边 6 int fat[10001];//记录集体老大 7 struct node 8 { 9 int from,to,dis;//结构体储存边 (起点,终点,边权) 10 }edge[10001]; 11 bool cmp(const node &a,const node &b)//sort排序 12 { 13 return a.dis<b.dis; 14 } 15 int father(int x)//并查集的一部分 ,查找两个元素他们的老大是不是一样的 16 //(具体并查集内容可见下一个博客----并查集 ) 17 { 18 if(fat[x]!=x) 19 return father(fat[x]); 20 else return x; 21 } 22 void unionn(int x,int y)//加入团体,并查集的一部分 23 { 24 fat[father(y)]=father(x); 25 } 26 int main() 27 { 28 scanf("%d%d",&n,&m);//输入点数,边数 29 for(int i=1;i<=m;i++) 30 { 31 scanf("%d%d%d",&edge[i].from,&edge[i].to,&edge[i].dis);//输入边的信息 32 } 33 for(int i=1;i<=n;i++) fat[i]=i;//自己最开始就是自己的老大 (初始化) 34 sort(edge+1,edge+1+m,cmp);//按权值排序(kruskal的体现) 35 for(int i=1;i<=m;i++)//从小到大遍历 36 { 37 if(k==n-1) break;//n个点需要n-1条边连接 38 if(father(edge[i].from)!=father(edge[i].to))//假如不在一个团体 39 { 40 unionn(edge[i].from,edge[i].to);//加入 41 tot+=edge[i].dis;//记录边权 42 k++;//已连接边数+1 43 } 44 } 45 printf("%d",tot); 46 return 0; 47 }
代码那么那么详细,我就不解释了
就先记录到这吧,以后还会加一些题之类的,会日臻完善
拜拜!
