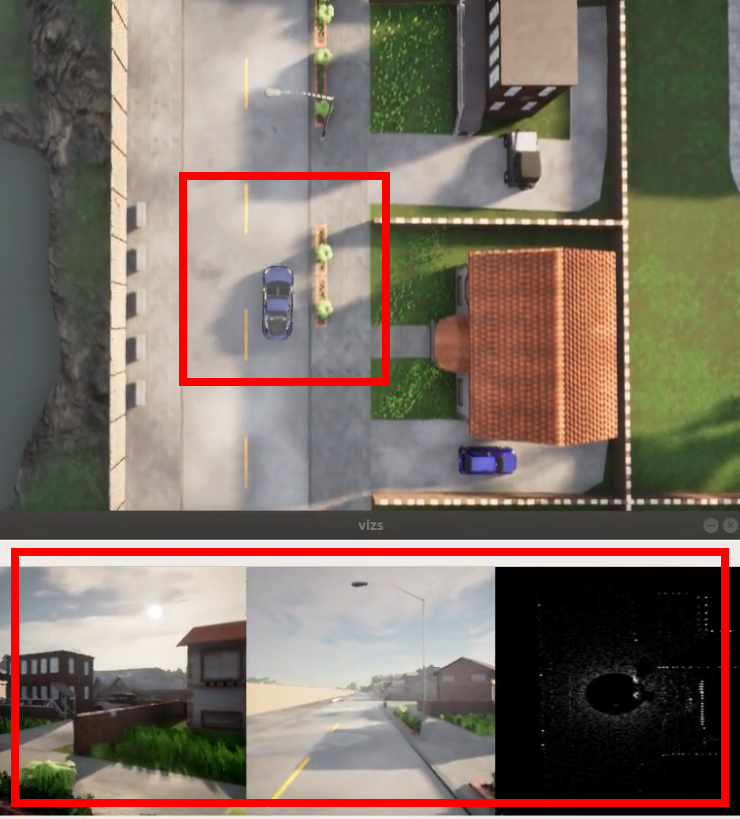
收集过程可视化展示,随后进入正文:
看到仿真群对这类任务下(用carla收集数据然后再做训练等) 需求量大,顺手马上写一个好了,首先收集数据需要考虑清楚:
-
收集什么数据,需要什么样的数据格式
-
数据之间的时间戳一定要同步,这就意味着对carla的时间设置有一定的认知
【仿真】Carla世界的时间 [2]
-
收集数据时一般没啥意外的话 我们倾向于车自己自动跑,有时候可能会想着 不考虑红绿灯、速度快一点等等等。这意味着要对traffic manager有一定认知
【仿真】Carla之Traffic Manager [3]
我一直以为... CARLA 写完的专栏已经很清晰的写了怎样使用 但是... 大家好像倾向于动手再说 就导致了 我们群里不止看到过一次以下问题:
- 怎样保证传感器之间的同步 → 同步模式设置
- 为什么我的CARLA看起来很卡 → 看看GPU能不能跟得上把 bro
接下来 我们将完成这样一个任务:收集车辆行驶过程中的前端两个相机图,顶部雷达点云,同时保存自身IMU和GNSS数据(注意GPS和直接从carla拿的location是不一样的!)GNSS的数据是需要进行一定转换才能和carla location是一样的
以下有些部分很基础,懒得看文字的直接看代码也行,代码地址:https://gitee.com/kin_zhang/carla-python-api/blob/develop/tutorial/collect_data.py
相关参考链接及教学 一并在前言放出,后续不再进行单独复制:
-
知乎小飞哥 CARLA教程专栏:https://www.zhihu.com/column/c_1324712096148516864
-
博主自己的 CSDN教程专栏:https://blog.csdn.net/qq_39537898/category_11562137.html
-
最好的!!!还是CARLA 官方文档!!! 球球大家多查查官方文档把!! PS 记得对上自己的CARLA版本哦
CARLA Simulator
简单关注点,以下全部有官方文档对应部分:
- CARLA 世界的时间是怎样运行与规定的:https://carla.readthedocs.io/en/latest/adv_synchrony_timestep/
- 内部有哪些传感器可用:https://carla.readthedocs.io/en/latest/ref_sensors/
注意收集数据 一定要开CARLA同步模式,而如果要用trafficmanager,因为开过同步模式,trafficmanager也是需要一起同步的。这块的知识在前言里有给出链接
球球大家看看时间设置把:CARLA时间设置
以下直接截取了,完整代码请点击前言部分:
def main(args):
# We start creating the client
client = carla.Client(args.host, args.port)
client.set_timeout(5.0)
# world = client.get_world()
world = client.load_world('Town01')
blueprint_library = world.get_blueprint_library()
try:
original_settings = world.get_settings()
settings = world.get_settings()
# We set CARLA syncronous mode
settings.fixed_delta_seconds = 0.05
settings.synchronous_mode = True
world.apply_settings(settings)
spectator = world.get_spectator()
# 手动规定
# transform_vehicle = carla.Transform(carla.Location(0, 10, 0), carla.Rotation(0, 0, 0))
# 自动选择
transform_vehicle = random.choice(world.get_map().get_spawn_points())
ego_vehicle = world.spawn_actor(random.choice(blueprint_library.filter("model3")), transform_vehicle)
actor_list.append(ego_vehicle)
- client和server进行连接
- get_world就是CARLA现在这个界面上是什么地图 世界就是那个;load world呢就是自己可以选不默认的CARLA 内置的几个城镇
- 开启同步模式
- 放一辆特斯拉的车到上面
因为简单起见,就不在进行专门的规则或者走carla 的behaviour agent了,直接用traffic manager里面的进行设置为自动驾驶模式,更多设置见官方文档,比如下面列举了:忽略红绿灯和限速
# 设置traffic manager
tm = client.get_trafficmanager(args.tm_port)
tm.set_synchronous_mode(True)
# 是否忽略红绿灯
# tm.ignore_lights_percentage(ego_vehicle, 100)
# 如果限速30km/h -> 30*(1-10%)=27km/h
tm.global_percentage_speed_difference(10.0)
ego_vehicle.set_autopilot(True, tm.get_port())
其中需要着重注意的是 因为前面设了同步 traffic manager也需要设为同步,同时销毁的时候要设置回来,刚刚写教程的时候 半天没找到bug 只看见车不动;前者是帮同学找问题的时候发现如果一个脚本设了同步 traffic manager不设同步 CARLA 整体npc会卡卡的
不设同步模式在没那么好的GPU上就会出现一卡一卡的现象 如下两幅动图对比,那么就会导致传感器收到的数据有丢帧现象,没错那篇时间博文里的插图,很久之前我画的(第二幅 很明显有卡帧和丢帧情况出现):
此处我们参考carla内部的示例,此处感谢李同学的提示 hhh 一开始打算直接暴力一点,想着都同步了 应该无需走queue了 不过还是frame保险起见比较好:
#-------------------------- 进入传感器部分 --------------------------#
sensor_queue = Queue()
cam_bp = blueprint_library.find('sensor.camera.rgb')
lidar_bp = blueprint_library.find('sensor.lidar.ray_cast')
imu_bp = blueprint_library.find('sensor.other.imu')
gnss_bp = blueprint_library.find('sensor.other.gnss')
# 可以设置一些参数 set the attribute of camera
cam_bp.set_attribute("image_size_x", "{}".format(IM_WIDTH))
cam_bp.set_attribute("image_size_y", "{}".format(IM_HEIGHT))
cam_bp.set_attribute("fov", "60")
# cam_bp.set_attribute('sensor_tick', '0.1')
cam01 = world.spawn_actor(cam_bp, carla.Transform(carla.Location(z=args.sensor_h),carla.Rotation(yaw=0)), attach_to=ego_vehicle)
cam01.listen(lambda data: sensor_callback(data, sensor_queue, "rgb_front"))
sensor_list.append(cam01)
cam02 = world.spawn_actor(cam_bp, carla.Transform(carla.Location(z=args.sensor_h),carla.Rotation(yaw=60)), attach_to=ego_vehicle)
cam02.listen(lambda data: sensor_callback(data, sensor_queue, "rgb_left"))
sensor_list.append(cam02)
lidar_bp.set_attribute('channels', '64')
lidar_bp.set_attribute('points_per_second', '200000')
lidar_bp.set_attribute('range', '32')
lidar_bp.set_attribute('rotation_frequency', str(int(1/settings.fixed_delta_seconds))) #
lidar01 = world.spawn_actor(lidar_bp, carla.Transform(carla.Location(z=args.sensor_h)), attach_to=ego_vehicle)
lidar01.listen(lambda data: sensor_callback(data, sensor_queue, "lidar"))
sensor_list.append(lidar01)
imu01 = world.spawn_actor(imu_bp, carla.Transform(carla.Location(z=args.sensor_h)), attach_to=ego_vehicle)
imu01.listen(lambda data: sensor_callback(data, sensor_queue, "imu"))
sensor_list.append(imu01)
gnss01 = world.spawn_actor(gnss_bp, carla.Transform(carla.Location(z=args.sensor_h)), attach_to=ego_vehicle)
gnss01.listen(lambda data: sensor_callback(data, sensor_queue, "gnss"))
sensor_list.append(gnss01)
#-------------------------- 传感器设置完毕 --------------------------#
以上主要是:
- 到库里去找到这样一个传感器
- 对传感器进行一些设置,比如相机的FOV,激光雷达的通道数
- 然后把传感器放到车上!所以有个attch到自己车上哈
主要需要注意的是激光雷达的设置:
-
points_per_second 越多 点越密集,同时和雷达通道数有关哈(可选我记得是:32、64、128)
-
一定要注意rotation_frequency 是自己fixed_delta_seconds 的频率 不然就会出现 只收了半面,比如这幅图:

主要参考carla官方示例里的sensor_synchronization.py,以下为while循环内截取
while True:
# Tick the server
world.tick()
# 将CARLA界面摄像头跟随车动
loc = ego_vehicle.get_transform().location
spectator.set_transform(carla.Transform(carla.Location(x=loc.x,y=loc.y,z=35),carla.Rotation(yaw=0,pitch=-90,roll=0)))
w_frame = world.get_snapshot().frame
print("\nWorld's frame: %d" % w_frame)
try:
rgbs = []
for i in range (0, len(sensor_list)):
s_frame, s_name, s_data = sensor_queue.get(True, 1.0)
print(" Frame: %d Sensor: %s" % (s_frame, s_name))
sensor_type = s_name.split('_')[0]
if sensor_type == 'rgb':
rgbs.append(_parse_image_cb(s_data))
elif sensor_type == 'lidar':
lidar = _parse_lidar_cb(s_data)
elif sensor_type == 'imu':
imu_yaw = s_data.compass
elif sensor_type == 'gnss':
gnss = s_data
# 仅用来可视化 可注释
rgb=np.concatenate(rgbs, axis=1)[...,:3]
cv2.imshow('vizs', visualize_data(rgb, lidar, imu_yaw, gnss))
cv2.waitKey(100)
except Empty:
print(" Some of the sensor information is missed")
def sensor_callback(sensor_data, sensor_queue, sensor_name):
# Do stuff with the sensor_data data like save it to disk
# Then you just need to add to the queue
sensor_queue.put((sensor_data.frame, sensor_name, sensor_data))
至此完成了收集数据部分,同时运行完整代码即可见如下动态所示:
这个就是对应的save一下就行,展示效果如下:
if rgb is None or args.save_path is not None:
# 检查是否有各自传感器的文件夹
mkdir_folder(args.save_path)
filename = args.save_path +'rgb/'+str(w_frame)+'.png'
cv2.imwrite(filename, np.array(rgb[...,::-1]))
filename = args.save_path +'lidar/'+str(w_frame)+'.npy'
np.save(filename, lidar)
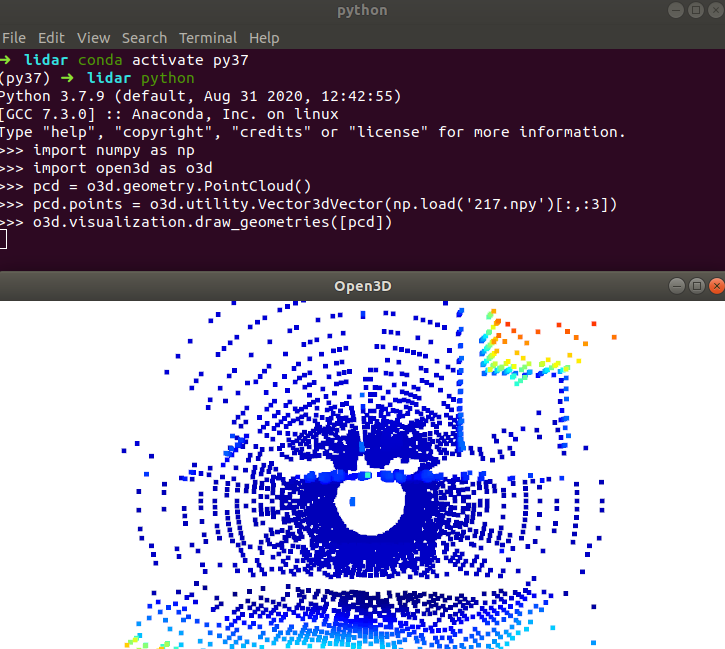
对于点云如果要有啥其他操作 推荐使用open3d进行,比如:
import numpy as np
import open3d as o3d
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(np.load('217.npy')[:,:3])
o3d.visualization.draw_geometries([pcd])
以上主要简单实现了一下CARLA内部简易版数据收集脚本,语重心长版:
- 要知道自己用CARLA的目的是什么
- 多看官方文档,很多API 官方解释的很到位
- 多看官方示例,很多都是宝藏 hhh
另外完整代码在:gitee 外链