[](()开始前的准备
借助python和OpenCV通过图片相减的方法找到动态物体,然后根据像素值的大小判断其中的均值颜色。
首先我们使用的库有cv2,numpy,collections,time。其中导入模块的代码如下:
import cv2
import numpy as np
import collections
import time
下面是读取摄像头:
camera = cv2.VideoCapture(0)
做一些开始前的准备,包括循环次数,摄像头内容读入,保存上一帧的图片作为对比作差找到动态物体,然后定义框架的长和宽。
firstframe = None
a=0
ret0,frame0 = camera.read()
cv2.imwrite("1.jpg",frame0)
x, y, w, h = 10,10,100,100
下面是定义颜色的部分代码,比如定义的黑色,可以参照hsv表进行拓展,如图所示
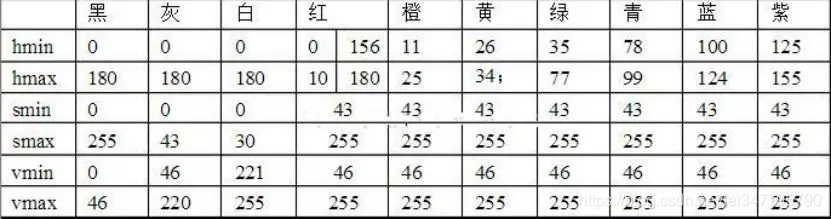
然后可以知道黑色的最低值为0,0,0,最大值为180,255,46然后建立数组存储颜色数据,通过字典达到映射效果。
处理图片
def get_color(frame):
print('go in get_color')
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
maxsum = -100
color = None
color_dict = getColorList()
for d in color_dict:
mask = cv2.inRange(frame, color_dict[d][0], color_dict[d][1])
cv2.imwrite(d + '.jpg', mask)
binary = cv2.threshold(mask, 127, 255, cv2.THRESH_BINARY)[1]
binary = cv2.dilate(binary, None, iterations=2)
img, cnts, hiera = cv2.findContours(binary.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
sum = 0
for c in cnts:
sum += cv2.contourArea(c)
if sum > maxsum:
maxsum = sum
color = d
return color
[](()图像处理
紧接着是图像处理,其中包括转为灰度图,读取颜色字典,然后腐化膨胀操作。
处理图片
def get_color(frame):
print('go in get_color')
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
maxsum = -100
color = None
color_dict = getColorList()
for d in color_dict:
mask = cv2.inRange(frame, color_dict[d][0], color_dict[d][1])
cv2.imwrite(d + '.jpg', mask)
binary = cv2.threshold(mask, 127, 255, cv2.THRESH_BINARY)[1]
binary = cv2.dilate(binary, None, iterations=2)
img, cnts, hiera = cv2.findContours(binary.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
sum = 0
for c in cnts:
sum += cv2.contourArea(c)
if sum > maxsum:
maxsum = sum
color = d
return color
[](()图片相减的办法
然后是图片相减找到动态物体的代码,每循环5次保存一次图片,时间是很短的不用担心。然后通过absdiff函数对图片像素值作差找到动态物体,接着讲像素值相减非零的部分用矩形框圈出来。