二、蝗虫优化算法(GOA)简介 1 GOA数学模型 2 GOA迭代模型 3 GOA算法的基本流程 4 GOA缺点 三、部分源代码 clear all clc SearchAgents_no = 100 ; % Number of search agents Function_name =
二、蝗虫优化算法(GOA)简介
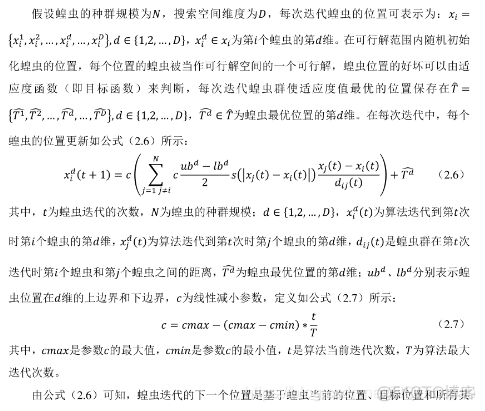
1 GOA数学模型
2 GOA迭代模型
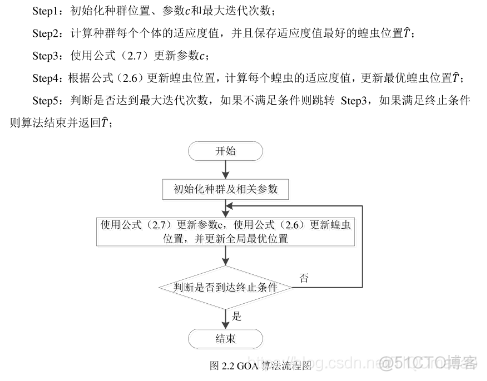
3 GOA算法的基本流程
4 GOA缺点
三、部分源代码
clear allclc
SearchAgents_no=100; % Number of search agents
Function_name='F1'; % Name of the test function that can be from F1 to F23 (Table 1,2,3 in the paper)
Max_iteration=500; % Maximum numbef of iterations
% Load details of the selected benchmark function
[lb,ub,dim,fobj]=Get_Functions_details(Function_name);
[Target_score,Target_pos,GOA_cg_curve, Trajectories,fitness_history, position_history]=GOA(SearchAgents_no,Max_iteration,lb,ub,dim,fobj);
figure('Position',[454 445 894 297])
%Draw search space
subplot(1,5,1);
func_plot(Function_name);
title('Parameter space')
xlabel('x_1');
ylabel('x_2');
zlabel([Function_name,'( x_1 , x_2 )'])
box on
axis tight
subplot(1,5,2);
hold on
for k1 = 1: size(position_history,1)
for k2 = 1: size(position_history,2)
plot(position_history(k1,k2,1),position_history(k1,k2,2),'.','markersize',1,'MarkerEdgeColor','k','markerfacecolor','k');
end
end
plot(Target_pos(1),Target_pos(2),'.','markersize',10,'MarkerEdgeColor','r','markerfacecolor','r');
title('Search history (x1 and x2 only)')
xlabel('x1')
ylabel('x2')
box on
axis tight
subplot(1,5,3);
hold on
plot(Trajectories(1,:));
title('Trajectory of 1st grasshopper')
xlabel('Iteration#')
box on
axis tight
subplot(1,5,4);
hold on
plot(mean(fitness_history));
title('Average fitness of all grasshoppers')
xlabel('Iteration#')
box on
axis tight
%Draw objective space
subplot(1,5,5);
semilogy(GOA_cg_curve,'Color','r')
title('Convergence curve')
xlabel('Iteration#');
ylabel('Best score obtained so far');
box on
axis tight
set(gcf, 'position' , [39 479 1727 267]);
display(['The best solution obtained by GOA is : ', num2str(Target_pos)]);
display(['The best optimal value of the objective funciton found by GOA is : ', num2str(Target_score)]);
function [TargetFitness,TargetPosition,Convergence_curve,Trajectories,fitness_history, position_history]=GOA(N, Max_iter, lb,ub, dim, fobj)
disp('GOA is now estimating the global optimum for your problem....')
flag=0;
if size(ub,1)==1
ub=ones(dim,1)*ub;
lb=ones(dim,1)*lb;
end
if (rem(dim,2)~=0) % this algorithm should be run with a even number of variables. This line is to handle odd number of variables
dim = dim+1;
ub = [ub; 100];
lb = [lb; -100];
flag=1;
end
%Initialize the population of grasshoppers
GrassHopperPositions=initialization(N,dim,ub,lb);
GrassHopperFitness = zeros(1,N);
fitness_history=zeros(N,Max_iter);
position_history=zeros(N,Max_iter,dim);
Convergence_curve=zeros(1,Max_iter);
Trajectories=zeros(N,Max_iter);
cMax=1;
cMin=0.00004;
%Calculate the fitness of initial grasshoppers
for i=1:size(GrassHopperPositions,1)
if flag == 1
GrassHopperFitness(1,i)=fobj(GrassHopperPositions(i,1:end-1));
else
GrassHopperFitness(1,i)=fobj(GrassHopperPositions(i,:));
end
fitness_history(i,1)=GrassHopperFitness(1,i);
position_history(i,1,:)=GrassHopperPositions(i,:);
Trajectories(:,1)=GrassHopperPositions(:,1);
end
[sorted_fitness,sorted_indexes]=sort(GrassHopperFitness);
% Find the best grasshopper (target) in the first population
for newindex=1:N
Sorted_grasshopper(newindex,:)=GrassHopperPositions(sorted_indexes(newindex),:);
end
TargetPosition=Sorted_grasshopper(1,:);
TargetFitness=sorted_fitness(1);
% Main loop
l=2; % Start from the second iteration since the first iteration was dedicated to calculating the fitness of antlions
while l<Max_iter+1
c=cMax-l*((cMax-cMin)/Max_iter); % Eq. (2.8) in the paper
for i=1:size(GrassHopperPositions,1)
temp= GrassHopperPositions';
for k=1:2:dim
S_i=zeros(2,1);
for j=1:N
if i~=j
Dist=distance(temp(k:k+1,j), temp(k:k+1,i)); % Calculate the distance between two grasshoppers
r_ij_vec=(temp(k:k+1,j)-temp(k:k+1,i))/(Dist+eps); % xj-xi/dij in Eq. (2.7)
xj_xi=2+rem(Dist,2); % |xjd - xid| in Eq. (2.7)
s_ij=((ub(k:k+1) - lb(k:k+1))*c/2)*S_func(xj_xi).*r_ij_vec; % The first part inside the big bracket in Eq. (2.7)
S_i=S_i+s_ij;
end
end
S_i_total(k:k+1, :) = S_i;
end
X_new = c * S_i_total'+ (TargetPosition); % Eq. (2.7) in the paper
GrassHopperPositions_temp(i,:)=X_new';
end
% GrassHopperPositions
GrassHopperPositions=GrassHopperPositions_temp;
for i=1:size(GrassHopperPositions,1)
% Relocate grasshoppers that go outside the search space
Tp=GrassHopperPositions(i,:)>ub';Tm=GrassHopperPositions(i,:)<lb';GrassHopperPositions(i,:)=(GrassHopperPositions(i,:).*(~(Tp+Tm)))+ub'.*Tp+lb'.*Tm;
% Calculating the objective values for all grasshoppers
if flag == 1
GrassHopperFitness(1,i)=fobj(GrassHopperPositions(i,1:end-1));
else
GrassHopperFitness(1,i)=fobj(GrassHopperPositions(i,:));
end
fitness_history(i,l)=GrassHopperFitness(1,i);
position_history(i,l,:)=GrassHopperPositions(i,:);
Trajectories(:,l)=GrassHopperPositions(:,1);
四、运行结果

五、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 包子阳,余继周,杨杉.智能优化算法及其MATLAB实例(第2版)[M].电子工业出版社,2016.
[2]张岩,吴水根.MATLAB优化算法源代码[M].清华大学出版社,2017.