随着我国农业产业化结构调整和互联网+模式的兴起,水果种植对于农民创收起到重要作用。相比于已实现种植收割全自动化主要粮食作物(如小麦、玉米),目前苹果、梨果等表皮薄易
随着我国农业产业化结构调整和互联网+模式的兴起,水果种植对于农民创收起到重要作用。相比于已实现种植收割全自动化主要粮食作物(如小麦、玉米),目前苹果、梨果等表皮薄易损伤的水果仍然需要人工采摘,这极大提高了人工成本,而且攀爬作业有很大的危险性。因此开发机械化的苹果收获机器人具有重要的现实意义。
苹果收获机器人主要包括视觉系统和带有末端执行器的机械臂两部分,涵盖了机器视觉、图像处理、机器人运动学、多传感器融合等多项技术。虽然国内外科研人员已经开发了多款苹果收获机器人,但是目前仍存在很多问题待解决,比如缺乏果肉损伤程度评估、枝条-果柄-果实的建模方法和果实分离机理认识不够深入等。
为了降低采摘过程中苹果果肉的损伤,西北农林科技大学的研究人员围绕苹果收获机器人采摘姿态优化展开研究。首先研究人员建立了枝条、果柄、果实有限元模型,并对比Abaqus仿真结果和试验结果进行验证,为末端执行器抓握和损伤评估以及采摘动作优化提供理论依据。
由于机械臂的采摘动作直接影响果实采摘效果,为了使苹果收获机器人采摘效果接近人工,研究人员使用NOKOV度量动作捕捉系统,采集人工采摘苹果时上臂动作,再控制机械臂按照其轨迹路径实现采摘动作。

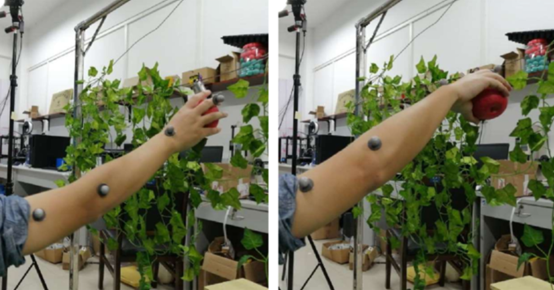
场地周围布置8个NOKOV度量动作捕捉相机,在测试人的肩关节、肘关节、腕关节和指尖上粘贴反光标识点,利用NOKOV度量动作捕捉系统跟踪记录人采摘苹果时的轨迹数据,并选取指尖轨迹数据进行研究分析,用于机械臂的轨迹规划。

参考文献:[1]卜令昕.结构化果园苹果收获机器人关键技术研究[D].西北农林科技大学,2021.DOI:10.27409/d.cnki.gxbnu.2021.000038.