目录 1. 图像轮廓 1.1 findContours介绍 1.2 绘制轮廓 1.3 轮廓特征 2. 轮廓近似 2.1 轮廓 2.2 边界矩形 2.3 外界多边形及面积 1. 图像轮廓 1.1 findContours介绍 cv2.findContours(img, mode, method) mode:轮廓检
目录
- 1. 图像轮廓
- 1.1 findContours介绍
- 1.2 绘制轮廓
- 1.3 轮廓特征
- 2. 轮廓近似
- 2.1 轮廓
- 2.2 边界矩形
- 2.3 外界多边形及面积
1. 图像轮廓
1.1 findContours介绍
cv2.findContours(img, mode, method)
mode:轮廓检索模式
- RETR_EXTERNAL :只检索最外面的轮廓;
- RETR_LIST:检索所有的轮廓,并将其保存到一条链表当中;
- RETR_CCOMP:检索所有的轮廓,并将他们组织为两层:顶层是各部分 外部边界,第二层是空洞的边界;
- RETR_TREE:检索所有的轮廓,并重构嵌套轮廓的整个层次;
method:轮廓逼近方法
- CHAIN_APPROX_NONE:以Freeman链码的方式输出轮廓,所有其他方法输出多边形(顶点的序列)。
- CHAIN_APPROX_SIMPLE:压缩水平的、垂直的和斜的部分,也就是,函数只保留他们的终点部分。
1.2 绘制轮廓
import cv2
def cv_show(img, name):
cv2.imshow(name, img)
cv2.waitKey()
cv2.destroyAllWindows()
img = cv2.imread('DataPreprocessing/img/contours.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
cv_show(thresh, 'thresh')
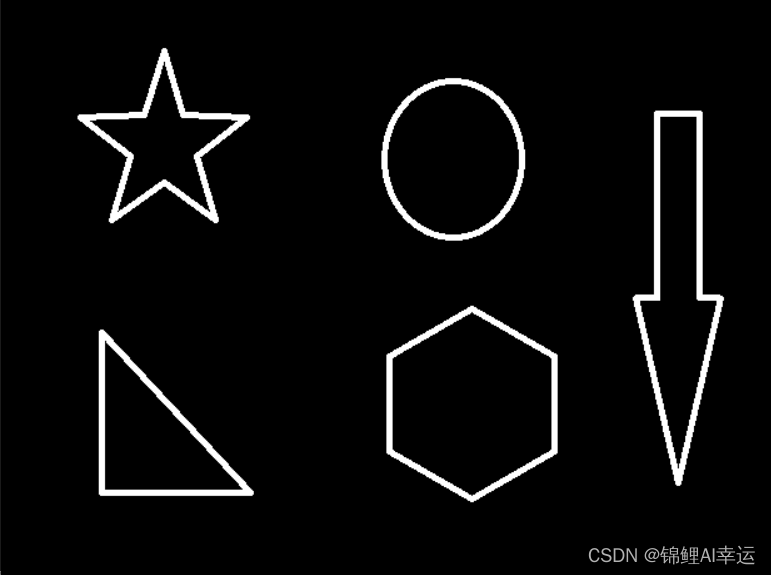
contours.png原图展示:
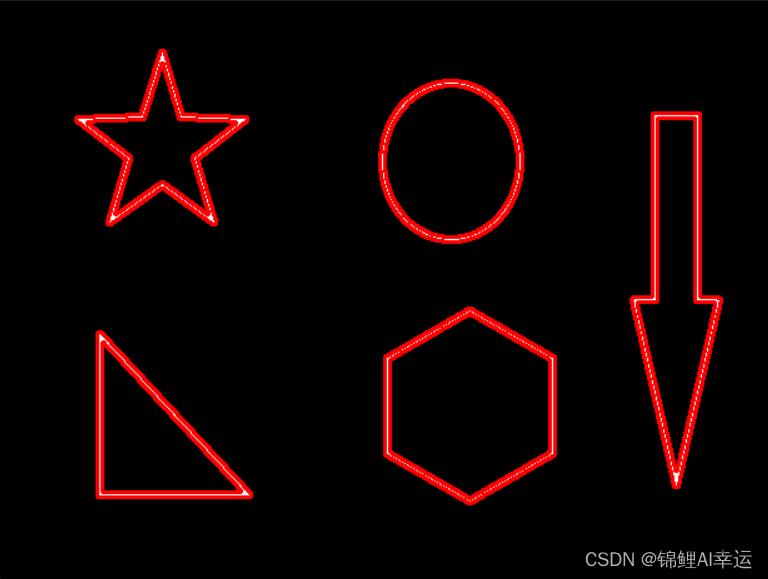
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) draw_img = img.copy() res = cv2.drawContours(draw_img, contours, -1, (0, 0, 255), 2) cv_show(res, 'res')
“-1”表示显示所有轮廓,(B, G , R) = (0, 0, 255) 采用红色的显示全部轮廓,如下:
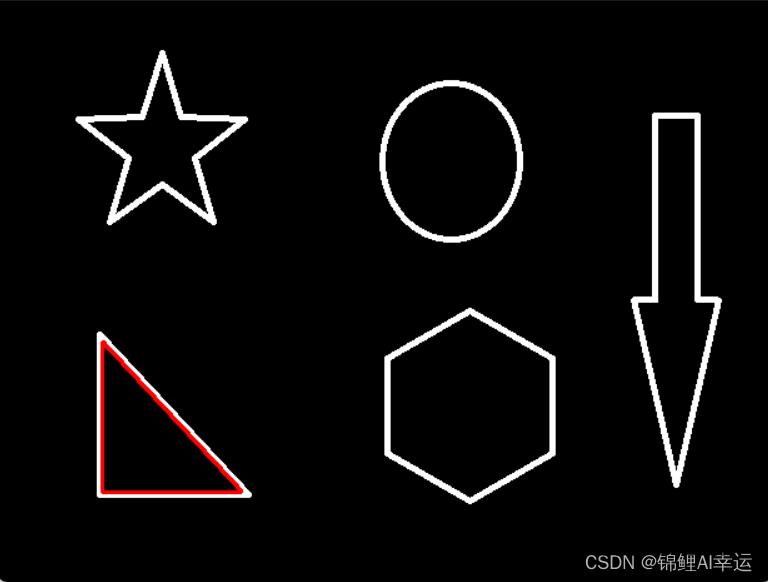
或者显示索引为1的轮廓,代码如下:
draw_img = img.copy() res = cv2.drawContours(draw_img, contours, 1, (0, 0, 255), 2) cv_show(res, 'res')
索引为1的是三角形的内轮廓,0是外轮廓:
1.3 轮廓特征
cnt = contours[0]
# 面积
print("面积: ", cv2.contourArea(cnt))
# 周长,True表示闭合的
print("周长: ", cv2.arcLength(cnt, True))
输出:
面积: 8500.5
周长: 437.9482651948929
2. 轮廓近似
2.1 轮廓
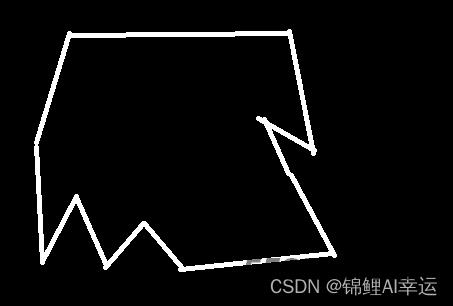
contours2.png原图 :
img = cv2.imread('DataPreprocessing/img/contours2.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
cnt = contours[0]
draw_img = img.copy()
res = cv2.drawContours(draw_img, [cnt], -1, (0, 0, 255), 2)
cv_show(res, 'res')
边缘检测:
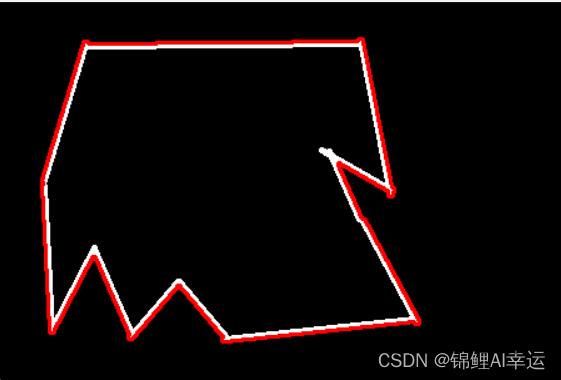
原理:以这个弧线为例, A , B A,B A,B端连线,取弧线上一点 C C C离线段 A B AB AB的距离最大,判断 d 1 d_{1} d1是否小于设置的阈值 T T T, 不小于 T T T的,则以 A , C A,C A,C连接线段 A C AC AC,重复上面的操作,取得图中的 d 2 d_{2} d2,再同 T T T做比较,直至 d n d_{n} dn小于阈值得出线段为轮廓边缘。

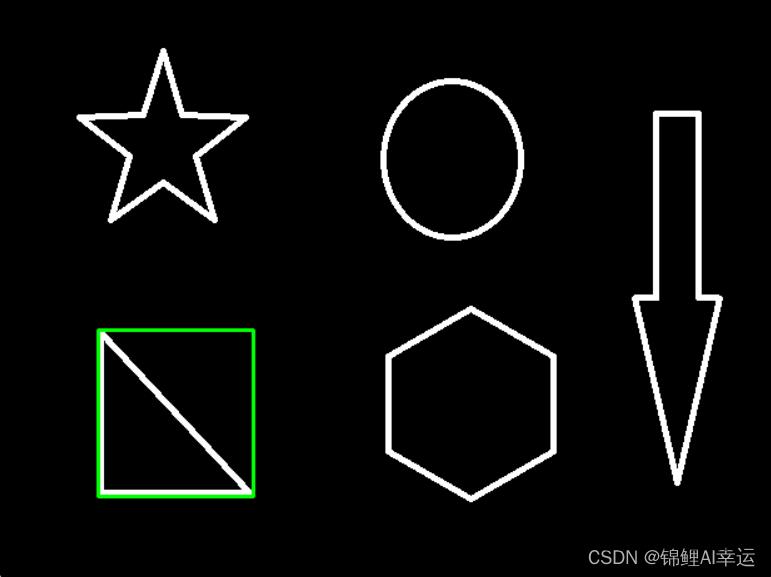
2.2 边界矩形
img = cv2.imread('DataPreprocessing/img/contours.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
cnt = contours[0]
x, y, w, h = cv2.boundingRect(cnt)
img = cv2.rectangle(img, (x, y), (x + w, y + h), (0, 255, 0), 2)
cv_show(img, 'img')
2.3 外界多边形及面积
area = cv2.contourArea(cnt)
x, y, w, h = cv2.boundingRect(cnt)
rect_area = w * h
extent = float(area) / rect_area
print('轮廓面积与边界矩形比', extent)
输出:
轮廓面积与边界矩形比 0.5154317244724715
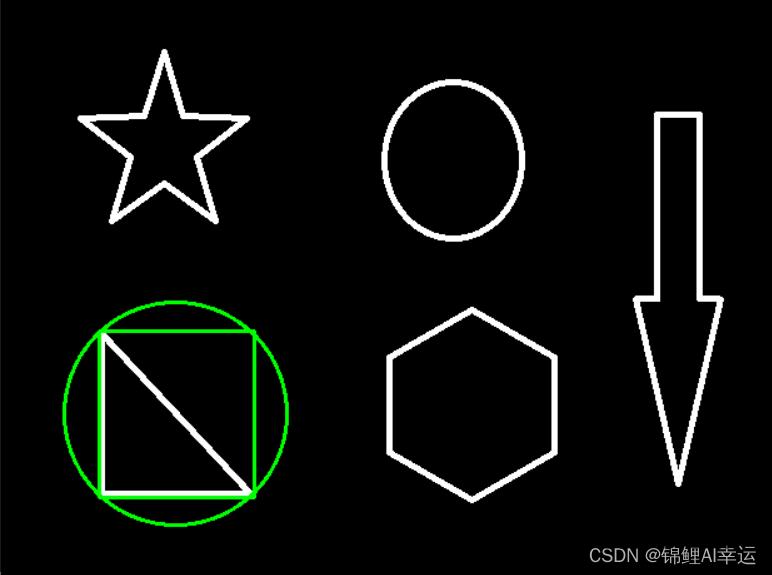
外接圆形:
(x, y), radius = cv2.minEnclosingCircle(cnt) center = (int(x), int(y)) radius = int(radius) img = cv2.circle(img, center, radius, (0, 255, 0), 2) cv_show(img, 'img')
结果展示:
到此这篇关于Python+OpenCV之图像轮廓详解的文章就介绍到这了,更多相关Python OpenCV图像轮廓内容请搜索自由互联以前的文章或继续浏览下面的相关文章希望大家以后多多支持自由互联!