目录
- yaml文件
- 超参数
- 优化策略
- 总结
yaml文件
模型深度&宽度
nc: 3 # 类别数量 depth_multiple: 0.33 # model depth multiple width_multiple: 0.50 # layer channel multiple
depth_multiple:控制子模块数量=int(number*depth)
width_multiple:控制卷积核的数量=int(number*width)
Anchor
anchors: - [10,13, 16,30, 33,23] # P3/8,检测小目标,10,13是一组尺寸,总共三组检测小目标 - [30,61, 62,45, 59,119] # P4/16,检测中目标,共三组 - [116,90, 156,198, 373,326] # P5/32,检测大目标,共三组
该anchor尺寸是为输入图像640×640分辨率预设的,实现了即可以在小特征图(feature map)上检测大目标,也可以在大特征图上检测小目标。三种尺寸的特征图,每个特征图上的格子有三个尺寸的anchor。
Backbone
backbone: # [from, number, module, args] [[-1, 1, Focus, [64, 3]], # 0-P1/2 [-1, 1, Conv, [128, 3, 2]], # 1-P2/4 [-1, 3, C3, [128]], [-1, 1, Conv, [256, 3, 2]], # 3-P3/8 [-1, 9, C3, [256]], [-1, 1, Conv, [512, 3, 2]], # 5-P4/16 [-1, 9, C3, [512]], [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32 [-1, 1, SPP, [1024, [5, 9, 13]]], [-1, 3, C3, [1024, False]], # 9 ]
具体解释如下:
from:输入来自那一层,-1代表上一次,1代表第1层,3代表第3层
number:模块的数量,最终数量需要乘width,然后四舍五入取整,如果小于1,取1。
module:子模块
args:模块参数,channel,kernel_size,stride,padding,bias等
Focus:对特征图进行切片操作,[64,3]得到[3,32,3],即输入channel=3(RGB),输出为640.5(width_multiple)=32,3为卷积核尺寸。
Conv:nn.conv(kenel_size=1,stride=1,groups=1,bias=False) + Bn + Leaky_ReLu。[-1, 1, Conv, [128, 3, 2]]:输入来自上一层,模块数量为1个,子模块为Conv,网络中最终有1280.5=32个卷积核,卷积核尺寸为3,stride=2,。
BottleNeckCSP:借鉴CSPNet网络结构,由3个卷积层和X个残差模块Concat组成,若有False,则没有残差模块,那么组成结构为nn.conv+Bn+Leaky_ReLu
SPP:[-1, 1, SPP, [1024, [5, 9, 13]]]表示5×5,9×9,13×13的最大池化方式,进行多尺度融合。源代码如下:
k = [5, 9, 13] self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
Head
head: [[-1, 1, Conv, [512, 1, 1]], [-1, 1, nn.Upsample, [None, 2, 'nearest']], 上采样 [[-1, 6], 1, Concat, [1]], # cat backbone P4 代表concat上一层和第6层 [-1, 3, C3, [512, False]], # 13 说明该层是第13层网络 [-1, 1, Conv, [256, 1, 1]], [-1, 1, nn.Upsample, [None, 2, 'nearest']], [[-1, 4], 1, Concat, [1]], # cat backbone P3 [-1, 3, C3, [256, False]], # 17 (P3/8-small) [-1, 1, Conv, [256, 3, 2]], [[-1, 14], 1, Concat, [1]], # cat head P4 [-1, 3, C3, [512, False]], # 20 (P4/16-medium) [-1, 1, Conv, [512, 3, 2]], [[-1, 10], 1, Concat, [1]], # cat head P5 [-1, 3, C3, [1024, False]], # 23 (P5/32-large) [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5),[17, 20, 23]说明输入来自第17,20,23层
YOLOv5中的Head包括Neck和Detect_head两部分。Neck采用了PANet机构,Detect结构和YOLOv3中的Head一样。其中BottleNeckCSP带有False,说明没有使用残差结构,而是采用的backbone中的Conv。
超参数
初始化超参
YOLOv5的超参文件见data/hyp.finetune.yaml(适用VOC数据集)或者hyo.scrach.yaml(适用COCO数据集)文件
lr0: 0.01 # 初始学习率 (SGD=1E-2, Adam=1E-3) lrf: 0.2 # 循环学习率 (lr0 * lrf) momentum: 0.937 # SGD momentum/Adam beta1 学习率动量 weight_decay: 0.0005 # 权重衰减系数 warmup_epochs: 3.0 # 预热学习 (fractions ok) warmup_momentum: 0.8 # 预热学习动量 warmup_bias_lr: 0.1 # 预热初始学习率 box: 0.05 # iou损失系数 cls: 0.5 # cls损失系数 cls_pw: 1.0 # cls BCELoss正样本权重 obj: 1.0 # 有无物体系数(scale with pixels) obj_pw: 1.0 # 有无物体BCELoss正样本权重 iou_t: 0.20 # IoU训练时的阈值 anchor_t: 4.0 # anchor的长宽比(长:宽 = 4:1) # anchors: 3 # 每个输出层的anchors数量(0 to ignore) #以下系数是数据增强系数,包括颜色空间和图片空间 fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5) hsv_h: 0.015 # 色调 (fraction) hsv_s: 0.7 # 饱和度 (fraction) hsv_v: 0.4 # 亮度 (fraction) degrees: 0.0 # 旋转角度 (+/- deg) translate: 0.1 # 平移(+/- fraction) scale: 0.5 # 图像缩放 (+/- gain) shear: 0.0 # 图像剪切 (+/- deg) perspective: 0.0 # 透明度 (+/- fraction), range 0-0.001 flipud: 0.0 # 进行上下翻转概率 (probability) fliplr: 0.5 # 进行左右翻转概率 (probability) mosaic: 1.0 # 进行Mosaic概率 (probability) mixup: 0.0 # 进行图像混叠概率(即,多张图像重叠在一起) (probability)
训练超参
训练超参数包括:yaml文件的选择,和训练图片的大小,预训练,batch,epoch等。
可以直接在train.py的parser中修改,也可以在命令行执行时修改,如:$ python train.py --data coco.yaml --cfg yolov5s.yaml --weights ‘’ --batch-size 64
–data指定训练数据文件 --cfg设置网络结构的配置文件 –weihts加载预训练模型的路径
优化策略
1)数增强策略
从数据角度,我们通过粘贴、裁剪、mosaic、仿射变换、颜色空间转换等对样本进行增强,增加目标多样性,以提升模型的检测与分类精度。
2)SAM优化器
SAM优化器[4]可使损失值和损失锐度同时最小化,并可以改善各种基准数据集(例如CIFAR-f10、100g,ImageNet,微调任务)和模型的模型泛化能力,从而产生了多种最新性能。另外, SAM优化器具有固有的鲁棒性。
经实验对比,模型进行优化器梯度归一化和采用SAM优化器,约有0.027点的提升。
3)Varifocal Loss损失函数
Varifocal Loss主要训练密集目标检测器使IOU感知的分类得分(IASC)回归,来提高检测精度。而目标遮挡是密集目标的特征之一,因此尝试使用该loss来缓解目标遮挡造成漏检现象。并且与focal loss不同,varifocal loss是不对称对待正负样本所带来的损失。
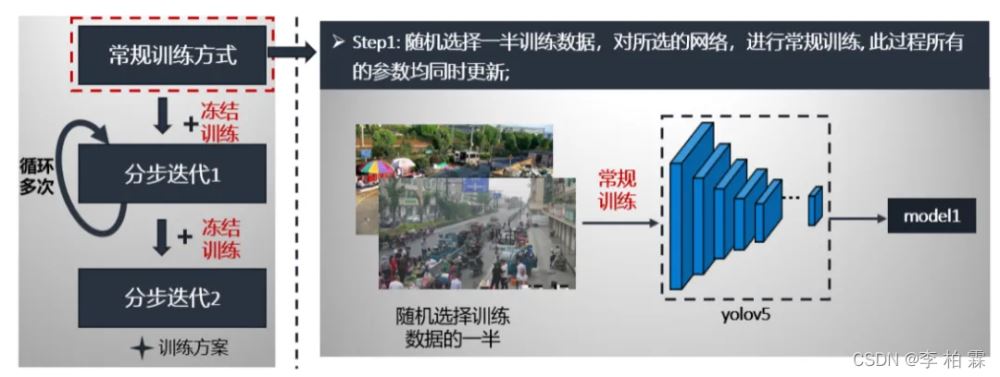
4)冻结训练
在训练过程中采取常规训练与冻结训练想相结合的方式迭代,进一步抑制训练过程中容易出现的过拟合现象,具体训练方案是:1)常规训练;2)加入冻结模块的分步训练1;3)加入冻结模块的分步训练2。
我们详细讲解以上步骤。第一步:从训练数据中随机选取一半,进行yolov5常规训练,该过程中所有的参数是同时更新的。具体流程如下:
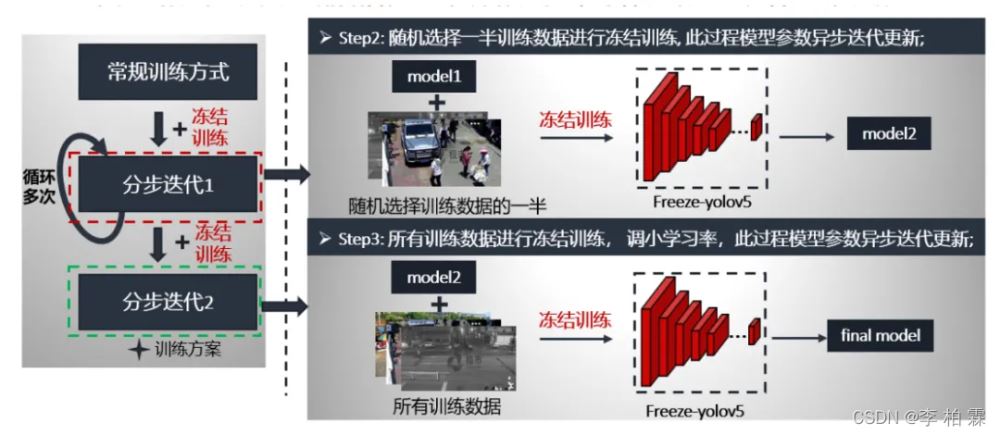
第二步分布迭代1就是采用的冻结模块进行,数据是随机选取训练数据的一半,预训练模型是第一步常规训练的最好模型,按照冻结训练方式进行训练。这个流程循环多次,获得model2。
第三步分布迭代2同样采用的是冻结模块进行,数据是所有训练数据,由于参数已经学过,这时我们将学习率调小一个量级,同样也是按照冻结训练方式进行训练。这个流程只循环一次,获得最终的模型。
两步的具体流程如下:
5)训练时间优化
最初我们直接采用yolov5训练,这种数据加载方式是以张为单位,基于像素的访问,但是训练时速度很慢,可能受其他线程影响造成的,大概一轮要40分钟左右。然后我们就尝试了cache这种方式,它是将所有训练数据存入到内存中,我们以6406403的输入图像为例,占道数据总共有10147张,全部读进去大约占11.6G的内存,平台是提供12G的内存,几乎将内存占满,也会导致训练变慢;于是我们就尝试改进训练读取数据方式,我们采用的是cache+图像编解码的方式,内存占用仅是cache的1/6,由于添加了编解码,速度比cache慢点,但从数据比较来看,相差无几。这样既能节省内存又能加快训练速度。节省了我们训练过程的极力值和加快实验的步伐。
总结
到此这篇关于YOLOV5超参数介绍以及优化策略的文章就介绍到这了,更多相关YOLOV5超参数及优化内容请搜索自由互联以前的文章或继续浏览下面的相关文章希望大家以后多多支持自由互联!