目录
- 一、前言
- 二、中间文件
- 三、使用
- 四、完整代码
一、前言
tinyobjloader地址:
传送门
而tinyobjloader库只有一个头文件,可以很方便的读取obj文件。支持材质,不过不支持骨骼动画,vulkan官方教程便是使用的它。不过没有骨骼动画还是有很大的局限性,这里只是分享一下怎么读取材质和拆分网格。
二、中间文件
我抽象了一个ModelObject类表示模型数据,而一个ModelObject包含多个Sub模型,每个Sub模型使用同一材质(有的人称为图元Primitive或DrawCall)。最后我将其保存为文件,这样我的引擎便可直接解析ModelObject文件,而不是再去读obj、fbx等其他文件了。
这一节可以跳过,下一节是真正使用tinyobjloader库。
//一个文件会有多个ModelObject,一个ModelObject根据材质分为多个ModelSub
//注意ModelSub为一个材质,需要读取时合并网格
class ModelObject
{
friend class VK;
public:
//从源文件加载模型
static vector<ModelObject*> Create(string_view path_name);
void Load(string_view path_name);
//保存到文件
void SaveToFile(string_view path_name);
private:
vector<ModelObjectSub> _allSub; //下标减1 为材质,0为没有材质
vector<Vertex> _allVertex;//顶点缓存
vector<uint32_t> _allIndex;//索引缓存
vector<ModelObjectMaterial> _allMaterial;//所有材质
//------------------不同格式加载实现--------------------------------
//obj
static vector<ModelObject*> _load_obj(string_view path_name);
static vector<ModelObject*> _load_obj_2(string_view path_name);
};
ModelObjectSub只是表示在索引缓存的一段范围:
//模型三角形范围
struct ModelTriangleRange
{
ModelTriangleRange() :
_countTriangle{ 0 },
_offsetIndex{ 0 }
{}
size_t _countTriangle;
size_t _offsetIndex;
};
//子模型对象 范围
struct ModelObjectSub
{
ModelTriangleRange _range;
};
而ModelObjectMaterial表示模型材质:
//! 材质
struct Material
{
glm::vec4 _diffuseAlbedo;//漫反射率
glm::vec3 _fresnelR0; //菲涅耳系数
float _roughness; //粗糙度
};
//模型对象 材质
struct ModelObjectMaterial
{
//最后转为Model时,变为可以用的着色器资源
Material _material;
string _materialName;
//路径为空,则表示没有(VK加载时会返回0)
string _pathTexDiffuse;
string _pathTexNormal;
};
三、使用
首先引入头文件:
#define TINYOBJLOADER_IMPLEMENTATION #include <tiny_obj_loader.h>
接口原型,将obj文件变为多个ModelObject:
vector<ModelObject*> ModelObject::_load_obj_2(string_view path_name);
取得文件名,和文件所在路径(会自动加载路径下的同名mtl文件,里面包含了材质):
string str_path = string{ path_name };
string str_base = String::EraseFilename(path_name);
const char* filename = str_path.c_str();
const char* basepath = str_base.c_str();
基本数据:
debug(format("开始加载obj文件:{},{}", filename, basepath));
bool triangulate = true;//三角化
tinyobj::attrib_t attrib; // 所有的数据放在这里
std::vector<tinyobj::shape_t> shapes;//子模型
std::vector<tinyobj::material_t> materials;//材质
std::string warn;
std::string err;
加载并打印一些信息:
bool b_read = tinyobj::LoadObj(&attrib, &shapes, &materials, &warn, &err, filename,
basepath, triangulate);
//打印错误
if (!warn.empty())
debug_warn(warn);
if (!err.empty())
debug_err(err);
if (!b_read)
{
debug_err(format("读取obj文件失败:{}", path_name));
return {};
}
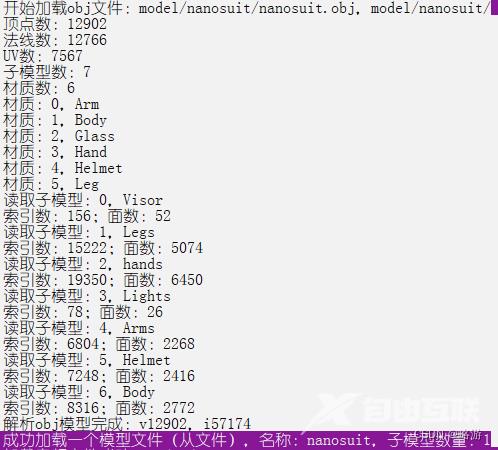
debug(format("顶点数:{}", attrib.vertices.size() / 3));
debug(format("法线数:{}", attrib.normals.size() / 3));
debug(format("UV数:{}", attrib.texcoords.size() / 2));
debug(format("子模型数:{}", shapes.size()));
debug(format("材质数:{}", materials.size()));
这将打印以下数据:

由于obj文件只产生一个ModelObject,我们如下添加一个,并返回顶点、索引、材质等引用,用于后面填充:
//obj只有一个ModelObject vector<ModelObject*> ret; ModelObject* model_object = new ModelObject; std::vector<Vertex>& mo_vertices = model_object->_allVertex; std::vector<uint32_t>& mo_indices = model_object->_allIndex; vector<ModelObjectMaterial>& mo_material = model_object->_allMaterial; ret.push_back(model_object);
首先记录材质信息:
//------------------获取材质-------------------
mo_material.resize(materials.size());
for (size_t i = 0; i < materials.size(); ++i)
{
tinyobj::material_t m = materials[i];
debug(format("材质:{},{}", i, m.name));
ModelObjectMaterial& material = model_object->_allMaterial[i];
material._materialName = m.name;
material._material._diffuseAlbedo = { m.diffuse[0], m.diffuse[1], m.diffuse[2], 1.0f };
material._material._fresnelR0 = { m.specular[0], m.specular[1], m.specular[2] };
material._material._roughness = ShininessToRoughness(m.shininess);
if(!m.diffuse_texname.empty())
material._pathTexDiffuse = str_base + m.diffuse_texname;
if (!m.normal_texname.empty())
material._pathTexNormal = str_base + m.normal_texname;
}
这将产生以下输出:
然后遍历shape,按材质记录顶点。这里需要注意的是,一个obj文件有多个shape,每个shape由n个三角面组成。而每个三角形拥有独立的材质编号,所以这里按材质分别记录,而不是一般的合并为整体:
//------------------获取模型-------------------
//按 材质 放入面的顶点
vector<vector<tinyobj::index_t>> all_sub;
all_sub.resize(1 + materials.size());//0为默认
for (size_t i = 0; i < shapes.size(); i++)
{//每一个子shape
tinyobj::shape_t& shape = shapes[i];
size_t num_index = shape.mesh.indices.size();
size_t num_face = shape.mesh.num_face_vertices.size();
debug(format("读取子模型:{},{}", i, shape.name));
debug(format("索引数:{};面数:{}", num_index, num_face));
//当前mesh下标(每个面递增3)
size_t index_offset = 0;
//每一个面
for (size_t j = 0; j < num_face; ++j)
{
int index_mat = shape.mesh.material_ids[j];//每个面的材质
vector<tinyobj::index_t>& sub_idx = all_sub[1 + index_mat];
sub_idx.push_back(shape.mesh.indices[index_offset++]);
sub_idx.push_back(shape.mesh.indices[index_offset++]);
sub_idx.push_back(shape.mesh.indices[index_offset++]);
}
}
按材质记录顶点的索引(tinyobj::index_t)后,接下来就是读取顶点的实际数据,并防止重复读取:
//生成子模型,并填入顶点
std::unordered_map<tinyobj::index_t, size_t, hash_idx, equal_idx>
uniqueVertices;//避免重复插入顶点
size_t i = 0;
for (vector<tinyobj::index_t>& sub_idx : all_sub)
{
ModelObjectSub sub;
sub._range._offsetIndex = i;
sub._range._countTriangle = sub_idx.size() / 3;
model_object->_allSub.push_back(sub);
for (tinyobj::index_t& idx : sub_idx)
{
auto iter = uniqueVertices.find(idx);
if (iter == uniqueVertices.end())
{
Vertex v;
//v
v._pos[0] = attrib.vertices[idx.vertex_index * 3 + 0];
v._pos[1] = attrib.vertices[idx.vertex_index * 3 + 1];
v._pos[2] = attrib.vertices[idx.vertex_index * 3 + 2];
// vt
v._texCoord[0] = attrib.texcoords[idx.texcoord_index * 2 + 0];
v._texCoord[1] = attrib.texcoords[idx.texcoord_index * 2 + 1];
v._texCoord[1] = 1.0f - v._texCoord[1];
uniqueVertices[idx] = mo_vertices.size();
mo_indices.push_back((uint32_t)mo_vertices.size());
mo_vertices.push_back(v);
}
else
{
mo_indices.push_back((uint32_t)iter->second);
}
++i;
}
}
debug(format("解析obj模型完成:v{},i{}", mo_vertices.size(), mo_indices.size()));
return ret;
上面用到的哈希函数:
struct equal_idx
{
bool operator()(const tinyobj::index_t& a, const tinyobj::index_t& b) const
{
return a.vertex_index == b.vertex_index
&& a.texcoord_index == b.texcoord_index
&& a.normal_index == b.normal_index;
}
};
struct hash_idx
{
size_t operator()(const tinyobj::index_t& a) const
{
return ((a.vertex_index
^ a.texcoord_index << 1) >> 1)
^ (a.normal_index << 1);
}
};
最后打印出来的数据如下:
对于材质的处理,漫反射贴图即是基本贴图,而法线(凹凸)贴图、漫反射率、菲涅耳系数、光滑度等需要渲染管线支持并与光照计算产生效果。
四、完整代码
可以此处获取最新的源码(我会改用Assimp,并添加骨骼动画、Blinn-Phong光照模型),也可以用后面的:传送门
如果有用,欢迎点赞、收藏、关注,我将更新更多C++相关的文章。
#define TINYOBJLOADER_IMPLEMENTATION
#include <tiny_obj_loader.h>
struct equal_idx
{
bool operator()(const tinyobj::index_t& a, const tinyobj::index_t& b) const
{
return a.vertex_index == b.vertex_index
&& a.texcoord_index == b.texcoord_index
&& a.normal_index == b.normal_index;
}
};
struct hash_idx
{
size_t operator()(const tinyobj::index_t& a) const
{
return ((a.vertex_index
^ a.texcoord_index << 1) >> 1)
^ (a.normal_index << 1);
}
};
float ShininessToRoughness(float Ypoint)
{
float a = -1;
float b = 2;
float c;
c = (Ypoint / 100) - 1;
float D;
D = b * b - (4 * a * c);
float x1;
x1 = (-b + sqrt(D)) / (2 * a);
return x1;
}
vector<ModelObject*> ModelObject::_load_obj_2(string_view path_name)
{
string str_path = string{ path_name };
string str_base = String::EraseFilename(path_name);
const char* filename = str_path.c_str();
const char* basepath = str_base.c_str();
bool triangulate = true;
debug(format("开始加载obj文件:{},{}", filename, basepath));
tinyobj::attrib_t attrib; // 所有的数据放在这里
std::vector<tinyobj::shape_t> shapes;//子模型
std::vector<tinyobj::material_t> materials;
std::string warn;
std::string err;
bool b_read = tinyobj::LoadObj(&attrib, &shapes, &materials, &warn, &err, filename,
basepath, triangulate);
//打印错误
if (!warn.empty())
debug_warn(warn);
if (!err.empty())
debug_err(err);
if (!b_read)
{
debug_err(format("读取obj文件失败:{}", path_name));
return {};
}
debug(format("顶点数:{}", attrib.vertices.size() / 3));
debug(format("法线数:{}", attrib.normals.size() / 3));
debug(format("UV数:{}", attrib.texcoords.size() / 2));
debug(format("子模型数:{}", shapes.size()));
debug(format("材质数:{}", materials.size()));
//obj只有一个ModelObject
vector<ModelObject*> ret;
ModelObject* model_object = new ModelObject;
std::vector<Vertex>& mo_vertices = model_object->_allVertex;
std::vector<uint32_t>& mo_indices = model_object->_allIndex;
vector<ModelObjectMaterial>& mo_material = model_object->_allMaterial;
ret.push_back(model_object);
//------------------获取材质-------------------
mo_material.resize(materials.size());
for (size_t i = 0; i < materials.size(); ++i)
{
tinyobj::material_t m = materials[i];
debug(format("材质:{},{}", i, m.name));
ModelObjectMaterial& material = model_object->_allMaterial[i];
material._materialName = m.name;
material._material._diffuseAlbedo = { m.diffuse[0], m.diffuse[1], m.diffuse[2], 1.0f };
material._material._fresnelR0 = { m.specular[0], m.specular[1], m.specular[2] };
material._material._roughness = ShininessToRoughness(m.shininess);
if(!m.diffuse_texname.empty())
material._pathTexDiffuse = str_base + m.diffuse_texname;
if (!m.normal_texname.empty())//注意这里凹凸贴图(bump_texname)更常见
material._pathTexNormal = str_base + m.normal_texname;
}
//------------------获取模型-------------------
//按 材质 放入面的顶点
vector<vector<tinyobj::index_t>> all_sub;
all_sub.resize(1 + materials.size());//0为默认
for (size_t i = 0; i < shapes.size(); i++)
{//每一个子shape
tinyobj::shape_t& shape = shapes[i];
size_t num_index = shape.mesh.indices.size();
size_t num_face = shape.mesh.num_face_vertices.size();
debug(format("读取子模型:{},{}", i, shape.name));
debug(format("索引数:{};面数:{}", num_index, num_face));
//当前mesh下标(每个面递增3)
size_t index_offset = 0;
//每一个面
for (size_t j = 0; j < num_face; ++j)
{
int index_mat = shape.mesh.material_ids[j];//每个面的材质
vector<tinyobj::index_t>& sub_idx = all_sub[1 + index_mat];
sub_idx.push_back(shape.mesh.indices[index_offset++]);
sub_idx.push_back(shape.mesh.indices[index_offset++]);
sub_idx.push_back(shape.mesh.indices[index_offset++]);
}
}
//生成子模型,并填入顶点
std::unordered_map<tinyobj::index_t, size_t, hash_idx, equal_idx>
uniqueVertices;//避免重复插入顶点
size_t i = 0;
for (vector<tinyobj::index_t>& sub_idx : all_sub)
{
ModelObjectSub sub;
sub._range._offsetIndex = i;
sub._range._countTriangle = sub_idx.size() / 3;
model_object->_allSub.push_back(sub);
for (tinyobj::index_t& idx : sub_idx)
{
auto iter = uniqueVertices.find(idx);
if (iter == uniqueVertices.end())
{
Vertex v;
//v
v._pos[0] = attrib.vertices[idx.vertex_index * 3 + 0];
v._pos[1] = attrib.vertices[idx.vertex_index * 3 + 1];
v._pos[2] = attrib.vertices[idx.vertex_index * 3 + 2];
// vt
v._texCoord[0] = attrib.texcoords[idx.texcoord_index * 2 + 0];
v._texCoord[1] = attrib.texcoords[idx.texcoord_index * 2 + 1];
v._texCoord[1] = 1.0f - v._texCoord[1];
uniqueVertices[idx] = mo_vertices.size();
mo_indices.push_back((uint32_t)mo_vertices.size());
mo_vertices.push_back(v);
}
else
{
mo_indices.push_back((uint32_t)iter->second);
}
++i;
}
}
debug(format("解析obj模型完成:v{},i{}", mo_vertices.size(), mo_indices.size()));
return ret;
}
到此这篇关于C++解析obj模型文件方法介绍的文章就介绍到这了,更多相关C++解析obj内容请搜索自由互联以前的文章或继续浏览下面的相关文章希望大家以后多多支持自由互联!