简述 深度优先 和广度优先是在图和树的遍历搜索中比较常用的搜索方法 内容 广度优先搜索和深度优先搜索一样,都是对图进行搜索的算法,都是从起点开始顺着边搜索,此时并不知道
简述
深度优先和广度优先是在图和树的遍历搜索中比较常用的搜索方法
内容
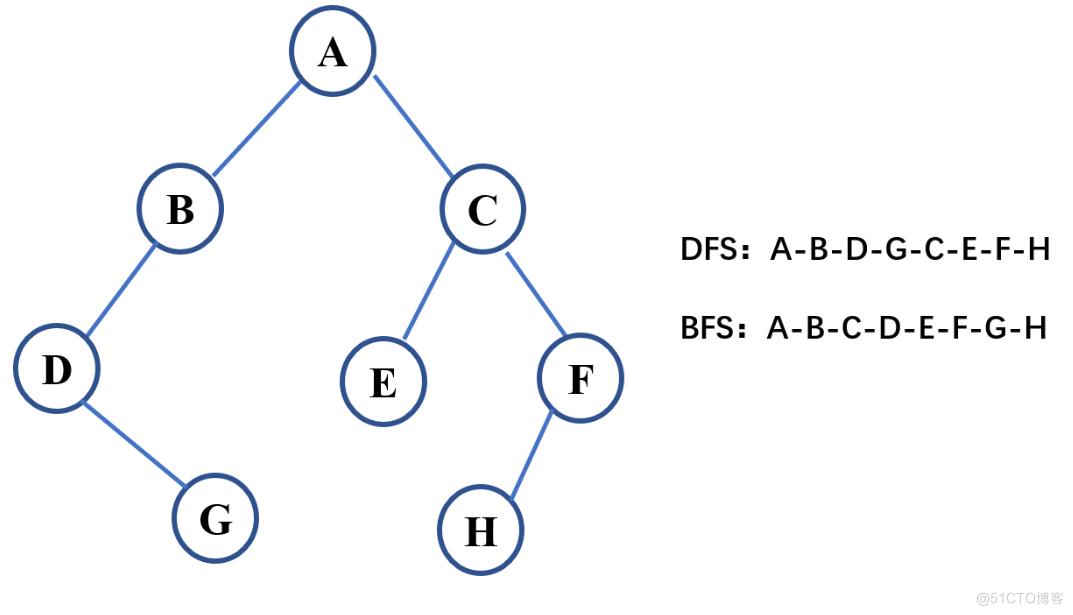
广度优先搜索和深度优先搜索一样,都是对图进行搜索的算法,都是从起点开始顺着边搜索,此时并不知道图的整体结构,直到找到指定节点(即终点)。在此过程中每走到一个节点,就会判断一次它是否为终点;
广度优先搜索会根据离起点的距离,按照从近到远的顺序对各节点进行搜索。而深度优先搜索会沿着一条路径不断往下搜索直到不能再继续为止,然后再折返,开始搜索下一条路径;
广度优先搜索
广度优先搜索中,有一个保存候补节点的队列,队列的性质就是先进先出,即先进入该队列的候补节点就先进行搜索
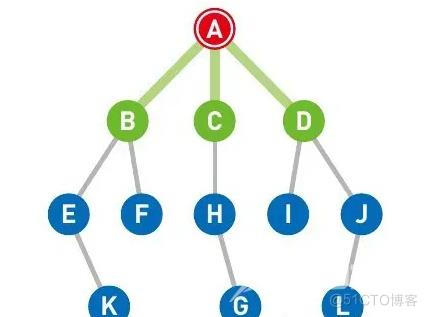
上图红色表示当前所在的节点(节点A),终点设为节点G,将与节点A直连的三个节点B, C, D放入存放候补节点的队列中(与节点A直连的三个节点放入时可以没有顺序,这里的放入顺序为B, C, D),用绿色表示;
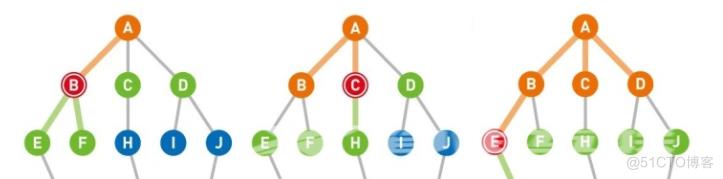
队列为:[C, D, E, F] ——> [D, E, F, H]——>[E, F, H, I, J]
深度优先搜索
深度优先搜索中,保存候补节点是栈,栈的性质就是先进后出,即最先进入该栈的候补节点就最后进行搜索;
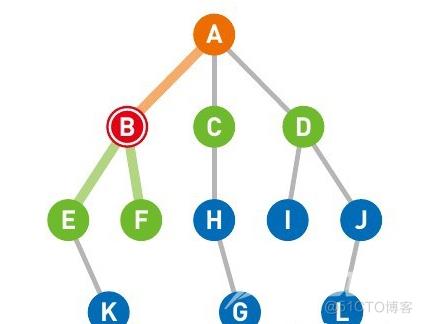
将起点设为节点A,终点设为节点G,还是先将与节点A直连的三个节点B, C, D放入存放候补节点的栈中(这里的放入顺序为D, C, B)
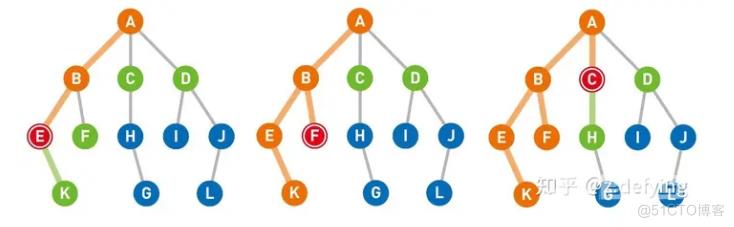
栈为 [D, C, F, K]——>[D, C, F]——> [D, C]——>[D, H]