在前面的文章《驱动开发:运用MDL映射实现多次通信》LyShark教大家使用MDL的方式灵活的实现了内核态多次输出结构体的效果,但是此种方法并不推荐大家使用原因很简单首先内核空间比较宝贵,其次内核里面不能分配太大且每次传出的结构体最大不能超过1024个,而最终这些内存由于无法得到更好的释放从而导致坏堆的产生,这样的程序显然是无法在生产环境中使用的,如下LyShark将教大家通过在应用层申请空间来实现同等效果,此类传递方式也是多数ARK反内核工具中最常采用的一种。
与MDL映射相反,MDL多数处理流程在内核代码中,而应用层开堆复杂代码则在应用层,但内核层中同样还是需要使用指针,只是这里的指针仅仅只是保留基本要素即可,通过EnumProcess()模拟枚举进程操作,传入的是PPROCESS_INFO进程指针转换,将数据传入到PPROCESS_INFO直接返回进程计数器即可。
// -------------------------------------------------
// R3传输结构体
// -------------------------------------------------
// 进程指针转换
typedef struct
{
DWORD PID;
DWORD PPID;
}PROCESS_INFO, *PPROCESS_INFO;
// 数据存储指针
typedef struct
{
ULONG_PTR nSize;
PVOID BufferPtr;
}BufferPointer, *pBufferPointer;
// 模拟进程枚举
ULONG EnumProcess(PPROCESS_INFO pBuffer)
{
ULONG nCount = 0;
for (size_t i = 0; i < 10; i++)
{
pBuffer[i].PID = nCount * 2;
pBuffer[i].PPID = nCount * 4;
nCount = nCount + 1;
}
return nCount;
}
内核层核心代码: 内核代码中是如何通信的,首先从用户态接收pIoBuffer到分配的缓冲区数据,并转换为pBufferPointer结构,ProbeForWrite用于检查地址是否可写入,接着会调用EnumProcess()注意传入的其实是应用层的指针,枚举进程结束后,将进程数量nCount通过*(PULONG)pIrp->AssociatedIrp.SystemBuffer = (ULONG)nCount回传给应用层,至此内核中仅仅回传了一个长度,其他的都写入到了应用层中。
// 署名权
// right to sign one's name on a piece of work
// PowerBy: LyShark
// Email: me@lyshark.com
pBufferPointer pinp = (pBufferPointer)pIoBuffer;
__try
{
DbgPrint("缓冲区长度: %d \n", pinp->nSize);
DbgPrint("缓冲区基地址: %p \n", pinp->BufferPtr);
// 检查地址是否可写入
ProbeForWrite(pinp->BufferPtr, pinp->nSize, 1);
ULONG nCount = EnumProcess((PPROCESS_INFO)pinp->BufferPtr);
DbgPrint("进程计数 = %d \n", nCount);
if (nCount > 0)
{
// 将进程数返回给用户
*(PULONG)pIrp->AssociatedIrp.SystemBuffer = (ULONG)nCount;
status = STATUS_SUCCESS;
}
}
__except (1)
{
status = GetExceptionCode();
DbgPrint("IOCTL_GET_EPROCESS %x \n", status);
}
// 返回通信状态
status = STATUS_SUCCESS;
break;
应用层核心代码: 通信的重点在于应用层,首先定义BufferPointer用于存放缓冲区头部指针,定义PPROCESS_INFO则是用于后期将数据放入该容器内,函数HeapAlloc分配一段堆空间,并HEAP_ZERO_MEMORY将该堆空间全部填空,将这一段初始化后的空间放入到pInput.BufferPtr缓冲区内,并计算出长度放入到pInput.nSize缓冲区内,一切准备就绪之后,再通过DriveControl.IoControl将BufferPointer结构传输至内核中,而bRet则是用于接收返回长度的变量。
当收到数据后,通过(PPROCESS_INFO)pInput.BufferPtr强制转换为指针类型,并依次pProcessInfo[i]读出每一个节点的元素,最后是调用HeapFree释放掉这段堆空间。至于输出就很简单了vectorProcess[x].PID循环容器元素即可。
// 署名权
// right to sign one's name on a piece of work
// PowerBy: LyShark
// Email: me@lyshark.com
// 应用层数据结构体数据
BOOL bRet = FALSE;
BufferPointer pInput = { 0 };
PPROCESS_INFO pProcessInfo = NULL;
// 分配堆空间
pInput.BufferPtr = (PVOID)HeapAlloc(GetProcessHeap(), HEAP_ZERO_MEMORY, sizeof(PROCESS_INFO) * 1000);
pInput.nSize = sizeof(PROCESS_INFO) * 1000;
ULONG nRet = 0;
if (pInput.BufferPtr)
{
bRet = DriveControl.IoControl(IOCTL_IO_R3StructAll, &pInput, sizeof(BufferPointer), &nRet, sizeof(ULONG), 0);
}
std::cout << "返回结构体数量: " << nRet << std::endl;
if (bRet && nRet > 0)
{
pProcessInfo = (PPROCESS_INFO)pInput.BufferPtr;
std::vector<PROCESS_INFO> vectorProcess;
for (ULONG i = 0; i < nRet; i++)
{
vectorProcess.push_back(pProcessInfo[i]);
}
// 释放空间
bRet = HeapFree(GetProcessHeap(), 0, pInput.BufferPtr);
std::cout << "释放状态: " << bRet << std::endl;
// 输出容器内的进程ID列表
for (int x = 0; x < nRet; x++)
{
std::cout << "PID: " << vectorProcess[x].PID << " PPID: " << vectorProcess[x].PPID << std::endl;
}
}
// 关闭符号链接句柄
CloseHandle(DriveControl.m_hDriver);
如上就是内核层与应用层的部分代码功能分析,接下来我将完整代码分享出来,大家可以自行测试效果。
驱动程序WinDDK.sys完整代码;
// 署名权
// right to sign one's name on a piece of work
// PowerBy: LyShark
// Email: me@lyshark.com
#define _CRT_SECURE_NO_WARNINGS
#include <ntifs.h>
#include <windef.h>
// 定义符号链接,一般来说修改为驱动的名字即可
#define DEVICE_NAME L"\\Device\\WinDDK"
#define LINK_NAME L"\\DosDevices\\WinDDK"
#define LINK_GLOBAL_NAME L"\\DosDevices\\Global\\WinDDK"
// 定义驱动功能号和名字,提供接口给应用程序调用
#define IOCTL_IO_R3StructAll CTL_CODE(FILE_DEVICE_UNKNOWN, 0x806, METHOD_BUFFERED, FILE_ANY_ACCESS)
// 保存一段非分页内存,用于给全局变量使用
#define FILE_DEVICE_EXTENSION 4096
// -------------------------------------------------
// R3传输结构体
// -------------------------------------------------
// 进程指针转换
typedef struct
{
DWORD PID;
DWORD PPID;
}PROCESS_INFO, *PPROCESS_INFO;
// 数据存储指针
typedef struct
{
ULONG_PTR nSize;
PVOID BufferPtr;
}BufferPointer, *pBufferPointer;
// 模拟进程枚举
ULONG EnumProcess(PPROCESS_INFO pBuffer)
{
ULONG nCount = 0;
for (size_t i = 0; i < 10; i++)
{
pBuffer[i].PID = nCount * 2;
pBuffer[i].PPID = nCount * 4;
nCount = nCount + 1;
}
return nCount;
}
// 驱动绑定默认派遣函数
NTSTATUS DefaultDispatch(PDEVICE_OBJECT _pDeviceObject, PIRP _pIrp)
{
_pIrp->IoStatus.Status = STATUS_NOT_SUPPORTED;
_pIrp->IoStatus.Information = 0;
IoCompleteRequest(_pIrp, IO_NO_INCREMENT);
return _pIrp->IoStatus.Status;
}
// 驱动卸载的处理例程
VOID DriverUnload(PDRIVER_OBJECT pDriverObj)
{
if (pDriverObj->DeviceObject)
{
UNICODE_STRING strLink;
// 删除符号连接和设备
RtlInitUnicodeString(&strLink, LINK_NAME);
IoDeleteSymbolicLink(&strLink);
IoDeleteDevice(pDriverObj->DeviceObject);
DbgPrint("[kernel] # 驱动已卸载 \n");
}
}
// IRP_MJ_CREATE 对应的处理例程,一般不用管它
NTSTATUS DispatchCreate(PDEVICE_OBJECT pDevObj, PIRP pIrp)
{
DbgPrint("[kernel] # 驱动处理例程载入 \n");
pIrp->IoStatus.Status = STATUS_SUCCESS;
pIrp->IoStatus.Information = 0;
IoCompleteRequest(pIrp, IO_NO_INCREMENT);
return STATUS_SUCCESS;
}
// IRP_MJ_CLOSE 对应的处理例程,一般不用管它
NTSTATUS DispatchClose(PDEVICE_OBJECT pDevObj, PIRP pIrp)
{
DbgPrint("[kernel] # 关闭派遣 \n");
pIrp->IoStatus.Status = STATUS_SUCCESS;
pIrp->IoStatus.Information = 0;
IoCompleteRequest(pIrp, IO_NO_INCREMENT);
return STATUS_SUCCESS;
}
// IRP_MJ_DEVICE_CONTROL 对应的处理例程,驱动最重要的函数
NTSTATUS DispatchIoctl(PDEVICE_OBJECT pDevObj, PIRP pIrp)
{
NTSTATUS status = STATUS_INVALID_DEVICE_REQUEST;
PIO_STACK_LOCATION pIrpStack;
ULONG uIoControlCode;
PVOID pIoBuffer;
ULONG uInSize;
ULONG uOutSize;
// 获得IRP里的关键数据
pIrpStack = IoGetCurrentIrpStackLocation(pIrp);
// 获取控制码
uIoControlCode = pIrpStack->Parameters.DeviceIoControl.IoControlCode;
// 输入和输出的缓冲区(DeviceIoControl的InBuffer和OutBuffer都是它)
pIoBuffer = pIrp->AssociatedIrp.SystemBuffer;
// EXE发送传入数据的BUFFER长度(DeviceIoControl的nInBufferSize)
uInSize = pIrpStack->Parameters.DeviceIoControl.InputBufferLength;
// EXE接收传出数据的BUFFER长度(DeviceIoControl的nOutBufferSize)
uOutSize = pIrpStack->Parameters.DeviceIoControl.OutputBufferLength;
// 对不同控制信号的处理流程
switch (uIoControlCode)
{
// 测试R3传输多次结构体
case IOCTL_IO_R3StructAll:
{
pBufferPointer pinp = (pBufferPointer)pIoBuffer;
__try
{
DbgPrint("[lyshark] 缓冲区长度: %d \n", pinp->nSize);
DbgPrint("[lyshark] 缓冲区基地址: %p \n", pinp->BufferPtr);
// 检查地址是否可写入
ProbeForWrite(pinp->BufferPtr, pinp->nSize, 1);
ULONG nCount = EnumProcess((PPROCESS_INFO)pinp->BufferPtr);
DbgPrint("[lyshark.com] 进程计数 = %d \n", nCount);
if (nCount > 0)
{
// 将进程数返回给用户
*(PULONG)pIrp->AssociatedIrp.SystemBuffer = (ULONG)nCount;
status = STATUS_SUCCESS;
}
}
__except (1)
{
status = GetExceptionCode();
DbgPrint("IOCTL_GET_EPROCESS %x \n", status);
}
// 返回通信状态
status = STATUS_SUCCESS;
break;
}
}
// 设定DeviceIoControl的*lpBytesReturned的值(如果通信失败则返回0长度)
if (status == STATUS_SUCCESS)
{
pIrp->IoStatus.Information = uOutSize;
}
else
{
pIrp->IoStatus.Information = 0;
}
// 设定DeviceIoControl的返回值是成功还是失败
pIrp->IoStatus.Status = status;
IoCompleteRequest(pIrp, IO_NO_INCREMENT);
return status;
}
// 驱动的初始化工作
NTSTATUS DriverEntry(PDRIVER_OBJECT pDriverObj, PUNICODE_STRING pRegistryString)
{
NTSTATUS status = STATUS_SUCCESS;
UNICODE_STRING ustrLinkName;
UNICODE_STRING ustrDevName;
PDEVICE_OBJECT pDevObj;
// 初始化其他派遣
for (ULONG i = 0; i < IRP_MJ_MAXIMUM_FUNCTION; i++)
{
// DbgPrint("初始化派遣: %d \n", i);
pDriverObj->MajorFunction[i] = DefaultDispatch;
}
// 设置分发函数和卸载例程
pDriverObj->MajorFunction[IRP_MJ_CREATE] = DispatchCreate;
pDriverObj->MajorFunction[IRP_MJ_CLOSE] = DispatchClose;
pDriverObj->MajorFunction[IRP_MJ_DEVICE_CONTROL] = DispatchIoctl;
pDriverObj->DriverUnload = DriverUnload;
// 创建一个设备
RtlInitUnicodeString(&ustrDevName, DEVICE_NAME);
// FILE_DEVICE_EXTENSION 创建设备时,指定设备扩展内存的大小,传一个值进去,就会给设备分配一块非页面内存。
status = IoCreateDevice(pDriverObj, sizeof(FILE_DEVICE_EXTENSION), &ustrDevName, FILE_DEVICE_UNKNOWN, 0, FALSE, &pDevObj);
if (!NT_SUCCESS(status))
{
return status;
}
// 判断支持的WDM版本,其实这个已经不需要了,纯属WIN9X和WINNT并存时代的残留物
if (IoIsWdmVersionAvailable(1, 0x10))
{
RtlInitUnicodeString(&ustrLinkName, LINK_GLOBAL_NAME);
}
else
{
RtlInitUnicodeString(&ustrLinkName, LINK_NAME);
}
// 创建符号连接
status = IoCreateSymbolicLink(&ustrLinkName, &ustrDevName);
if (!NT_SUCCESS(status))
{
DbgPrint("创建符号链接失败 \n");
IoDeleteDevice(pDevObj);
return status;
}
DbgPrint("[hello LyShark.com] # 驱动初始化完毕 \n");
// 返回加载驱动的状态(如果返回失败,驱动讲被清除出内核空间)
return STATUS_SUCCESS;
}
应用层客户端程序lyshark.exe完整代码;
// 署名权
// right to sign one's name on a piece of work
// PowerBy: LyShark
// Email: me@lyshark.com
#include <iostream>
#include <Windows.h>
#include <vector>
#pragma comment(lib,"user32.lib")
#pragma comment(lib,"advapi32.lib")
// 定义驱动功能号和名字,提供接口给应用程序调用
#define IOCTL_IO_R3StructAll 0x806
class cDrvCtrl
{
public:
cDrvCtrl()
{
m_pSysPath = NULL;
m_pServiceName = NULL;
m_pDisplayName = NULL;
m_hSCManager = NULL;
m_hService = NULL;
m_hDriver = INVALID_HANDLE_VALUE;
}
~cDrvCtrl()
{
CloseServiceHandle(m_hService);
CloseServiceHandle(m_hSCManager);
CloseHandle(m_hDriver);
}
// 安装驱动
BOOL Install(PCHAR pSysPath, PCHAR pServiceName, PCHAR pDisplayName)
{
m_pSysPath = pSysPath;
m_pServiceName = pServiceName;
m_pDisplayName = pDisplayName;
m_hSCManager = OpenSCManagerA(NULL, NULL, SC_MANAGER_ALL_ACCESS);
if (NULL == m_hSCManager)
{
m_dwLastError = GetLastError();
return FALSE;
}
m_hService = CreateServiceA(m_hSCManager, m_pServiceName, m_pDisplayName,
SERVICE_ALL_ACCESS, SERVICE_KERNEL_DRIVER, SERVICE_DEMAND_START, SERVICE_ERROR_NORMAL,
m_pSysPath, NULL, NULL, NULL, NULL, NULL);
if (NULL == m_hService)
{
m_dwLastError = GetLastError();
if (ERROR_SERVICE_EXISTS == m_dwLastError)
{
m_hService = OpenServiceA(m_hSCManager, m_pServiceName, SERVICE_ALL_ACCESS);
if (NULL == m_hService)
{
CloseServiceHandle(m_hSCManager);
return FALSE;
}
}
else
{
CloseServiceHandle(m_hSCManager);
return FALSE;
}
}
return TRUE;
}
// 启动驱动
BOOL Start()
{
if (!StartServiceA(m_hService, NULL, NULL))
{
m_dwLastError = GetLastError();
return FALSE;
}
return TRUE;
}
// 关闭驱动
BOOL Stop()
{
SERVICE_STATUS ss;
GetSvcHandle(m_pServiceName);
if (!ControlService(m_hService, SERVICE_CONTROL_STOP, &ss))
{
m_dwLastError = GetLastError();
return FALSE;
}
return TRUE;
}
// 移除驱动
BOOL Remove()
{
GetSvcHandle(m_pServiceName);
if (!DeleteService(m_hService))
{
m_dwLastError = GetLastError();
return FALSE;
}
return TRUE;
}
// 打开驱动
BOOL Open(PCHAR pLinkName)
{
if (m_hDriver != INVALID_HANDLE_VALUE)
return TRUE;
m_hDriver = CreateFileA(pLinkName, GENERIC_READ | GENERIC_WRITE, 0, 0, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, 0);
if (m_hDriver != INVALID_HANDLE_VALUE)
return TRUE;
else
return FALSE;
}
// 发送控制信号
BOOL IoControl(DWORD dwIoCode, PVOID InBuff, DWORD InBuffLen, PVOID OutBuff, DWORD OutBuffLen, DWORD *RealRetBytes)
{
DWORD dw;
BOOL b = DeviceIoControl(m_hDriver, CTL_CODE_GEN(dwIoCode), InBuff, InBuffLen, OutBuff, OutBuffLen, &dw, NULL);
if (RealRetBytes)
*RealRetBytes = dw;
return b;
}
private:
// 获取服务句柄
BOOL GetSvcHandle(PCHAR pServiceName)
{
m_pServiceName = pServiceName;
m_hSCManager = OpenSCManagerA(NULL, NULL, SC_MANAGER_ALL_ACCESS);
if (NULL == m_hSCManager)
{
m_dwLastError = GetLastError();
return FALSE;
}
m_hService = OpenServiceA(m_hSCManager, m_pServiceName, SERVICE_ALL_ACCESS);
if (NULL == m_hService)
{
CloseServiceHandle(m_hSCManager);
return FALSE;
}
else
{
return TRUE;
}
}
// 获取控制信号对应字符串
DWORD CTL_CODE_GEN(DWORD lngFunction)
{
return (FILE_DEVICE_UNKNOWN * 65536) | (FILE_ANY_ACCESS * 16384) | (lngFunction * 4) | METHOD_BUFFERED;
}
public:
DWORD m_dwLastError;
PCHAR m_pSysPath;
PCHAR m_pServiceName;
PCHAR m_pDisplayName;
HANDLE m_hDriver;
SC_HANDLE m_hSCManager;
SC_HANDLE m_hService;
};
void GetAppPath(char *szCurFile)
{
GetModuleFileNameA(0, szCurFile, MAX_PATH);
for (SIZE_T i = strlen(szCurFile) - 1; i >= 0; i--)
{
if (szCurFile[i] == '\\')
{
szCurFile[i + 1] = '\0';
break;
}
}
}
// -------------------------------------------------
// R3数据传递变量
// -------------------------------------------------
// 进程指针转换
typedef struct
{
DWORD PID;
DWORD PPID;
}PROCESS_INFO, *PPROCESS_INFO;
// 数据存储指针
typedef struct
{
ULONG_PTR nSize;
PVOID BufferPtr;
}BufferPointer, *pBufferPointer;
int main(int argc, char *argv[])
{
cDrvCtrl DriveControl;
// 设置驱动名称
char szSysFile[MAX_PATH] = { 0 };
char szSvcLnkName[] = "WinDDK";;
GetAppPath(szSysFile);
strcat(szSysFile, "WinDDK.sys");
// 安装并启动驱动
DriveControl.Install(szSysFile, szSvcLnkName, szSvcLnkName);
DriveControl.Start();
// 打开驱动的符号链接
DriveControl.Open("\\\\.\\WinDDK");
// 应用层数据结构体数据
BOOL bRet = FALSE;
BufferPointer pInput = { 0 };
PPROCESS_INFO pProcessInfo = NULL;
// 分配堆空间
pInput.BufferPtr = (PVOID)HeapAlloc(GetProcessHeap(), HEAP_ZERO_MEMORY, sizeof(PROCESS_INFO) * 1000);
pInput.nSize = sizeof(PROCESS_INFO) * 1000;
ULONG nRet = 0;
if (pInput.BufferPtr)
{
bRet = DriveControl.IoControl(IOCTL_IO_R3StructAll, &pInput, sizeof(BufferPointer), &nRet, sizeof(ULONG), 0);
}
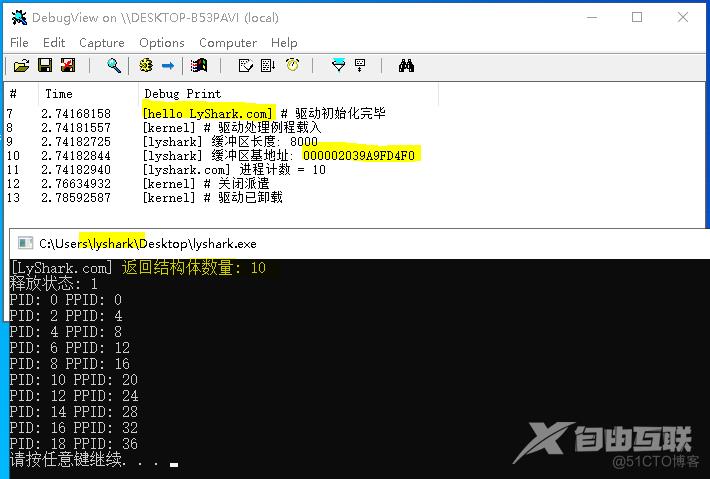
std::cout << "[LyShark.com] 返回结构体数量: " << nRet << std::endl;
if (bRet && nRet > 0)
{
pProcessInfo = (PPROCESS_INFO)pInput.BufferPtr;
std::vector<PROCESS_INFO> vectorProcess;
for (ULONG i = 0; i < nRet; i++)
{
vectorProcess.push_back(pProcessInfo[i]);
}
// 释放空间
bRet = HeapFree(GetProcessHeap(), 0, pInput.BufferPtr);
std::cout << "释放状态: " << bRet << std::endl;
// 输出容器内的进程ID列表
for (int x = 0; x < nRet; x++)
{
std::cout << "PID: " << vectorProcess[x].PID << " PPID: " << vectorProcess[x].PPID << std::endl;
}
}
// 关闭符号链接句柄
CloseHandle(DriveControl.m_hDriver);
// 停止并卸载驱动
DriveControl.Stop();
DriveControl.Remove();
system("pause");
return 0;
}
手动编译这两个程序,将驱动签名后以管理员身份运行lyshark.exe客户端,此时屏幕中即可看到滚动输出效果,如此一来就实现了循环传递参数的目的。