线程的最大特点是资源的共享性,但资源共享中的同步问题是多线程编程的难点。linux下提供了多种方式来处理线程同步,最常用的是互斥锁、条件变量和信号量。 一、互斥锁(mutex) 通
线程的最大特点是资源的共享性,但资源共享中的同步问题是多线程编程的难点。linux下提供了多种方式来处理线程同步,最常用的是互斥锁、条件变量和信号量。
一、互斥锁(mutex)
通过锁机制实现线程间的同步。
- 初始化锁。在Linux下,线程的互斥量数据类型是pthread_mutex_t。在使用前,要对它进行初始化。
静态分配:pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
动态分配:int pthread_mutex_init(pthread_mutex_t *mutex, const pthread_mutex_attr_t *mutexattr); - 加锁。对共享资源的访问,要对互斥量进行加锁,如果互斥量已经上了锁,调用线程会阻塞,直到互斥量被解锁。
int pthread_mutex_lock(pthread_mutex *mutex);
int pthread_mutex_trylock(pthread_mutex_t *mutex); - 解锁。在完成了对共享资源的访问后,要对互斥量进行解锁。
int pthread_mutex_unlock(pthread_mutex_t *mutex); - 销毁锁。锁在是使用完成后,需要进行销毁以释放资源。
int pthread_mutex_destroy(pthread_mutex *mutex);
二、条件变量(cond)
1. #include <cstdio>
2. #include <cstdlib>
3. #include <unistd.h>
4. #include <pthread.h>
5. #include "iostream"
6. using namespace std;
7. pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
8. int tmp;
9. void* thread(void *arg)
10. {
11. cout << "thread id is " << pthread_self() << endl;
12. pthread_mutex_lock(&mutex);
13. tmp = 12;
14. cout << "Now a is " << tmp << endl;
15. pthread_mutex_unlock(&mutex);
16. return NULL;
17. }
18. int main()
19. {
20. pthread_t id;
21. cout << "main thread id is " << pthread_self() << endl;
22. tmp = 3;
23. cout << "In main func tmp = " << tmp << endl;
24. if (!pthread_create(&id, NULL, thread, NULL))
25. {
26. cout << "Create thread success!" << endl;
27. }
28. else
29. {
30. cout << "Create thread failed!" << endl;
31. }
32. pthread_join(id, NULL);
33. pthread_mutex_destroy(&mutex);
34. return 0;
35. }
36. //编译:g++ -o thread testthread.cpp -lpthread互斥锁不同,条件变量是用来等待而不是用来上锁的。条件变量用来自动阻塞一个线程,直到某特殊情况发生为止。通常条件变量和互斥锁同时使用。条件变量分为两部分: 条件和变量。条件本身是由互斥量保护的。线程在改变条件状态前先要锁住互斥量。条件变量使我们可以睡眠等待某种条件出现。条件变量是利用线程间共享的全局变量进行同步的一种机制,主要包括两个动作:一个线程等待"条件变量的条件成立"而挂起;另一个线程使"条件成立"(给出条件成立信号)。条件的检测是在互斥锁的保护下进行的。如果一个条件为假,一个线程自动阻塞,并释放等待状态改变的互斥锁。如果另一个线程改变了条件,它发信号给关联的条件变量,唤醒一个或多个等待它的线程,重新获得互斥锁,重新评价条件。如果两进程共享可读写的内存,条件变量可以被用来实现这两进程间的线程同步。
- 初始化条件变量。
静态态初始化,pthread_cond_t cond = PTHREAD_COND_INITIALIER;
动态初始化,int pthread_cond_init(pthread_cond_t *cond, pthread_condattr_t *cond_attr); - 等待条件成立。释放锁,同时阻塞等待条件变量为真才行。timewait()设置等待时间,仍未signal,返回ETIMEOUT(加锁保证只有一个线程wait)
int pthread_cond_wait(pthread_cond_t *cond, pthread_mutex_t *mutex);
int pthread_cond_timewait(pthread_cond_t *cond,pthread_mutex *mutex,const timespec *abstime); - 激活条件变量。pthread_cond_signal,pthread_cond_broadcast(激活所有等待线程)
int pthread_cond_signal(pthread_cond_t *cond);
int pthread_cond_broadcast(pthread_cond_t *cond); //解除所有线程的阻塞 - 清除条件变量。无线程等待,否则返回EBUSY
int pthread_cond_destroy(pthread_cond_t *cond);
1. #include <stdio.h>
2. #include <pthread.h>
3. #include "stdlib.h"
4. #include "unistd.h"
5. pthread_mutex_t mutex;
6. pthread_cond_t cond;
7. void hander(void *arg)
8. {
9. free(arg);
10. (void)pthread_mutex_unlock(&mutex);
11. }
12. void *thread1(void *arg)
13. {
14. pthread_cleanup_push(hander, &mutex);
15. while(1)
16. {
17. printf("thread1 is running\n");
18. pthread_mutex_lock(&mutex);
19. pthread_cond_wait(&cond, &mutex);
20. printf("thread1 applied the condition\n");
21. pthread_mutex_unlock(&mutex);
22. sleep(4);
23. }
24. pthread_cleanup_pop(0);
25. }
26. void *thread2(void *arg)
27. {
28. while(1)
29. {
30. printf("thread2 is running\n");
31. pthread_mutex_lock(&mutex);
32. pthread_cond_wait(&cond, &mutex);
33. printf("thread2 applied the condition\n");
34. pthread_mutex_unlock(&mutex);
35. sleep(1);
36. }
37. }
38. int main()
39. {
40. pthread_t thid1,thid2;
41. printf("condition variable study!\n");
42. pthread_mutex_init(&mutex, NULL);
43. pthread_cond_init(&cond, NULL);
44. pthread_create(&thid1, NULL, thread1, NULL);
45. pthread_create(&thid2, NULL, thread2, NULL);
46. sleep(1);
47. do
48. {
49. pthread_cond_signal(&cond);
50. }while(1);
51. sleep(20);
52. pthread_exit(0);
53. return 0;
54. }
三、信号量(sem)
1. #include <pthread.h>
2. #include <unistd.h>
3. #include "stdio.h"
4. #include "stdlib.h"
5. static pthread_mutex_t mtx = PTHREAD_MUTEX_INITIALIZER;
6. static pthread_cond_t cond = PTHREAD_COND_INITIALIZER;
7. struct node
8. {
9. int n_number;
10. struct node *n_next;
11. }*head = NULL;
12.
13. static void cleanup_handler(void *arg)
14. {
15. printf("Cleanup handler of second thread./n");
16. free(arg);
17. (void)pthread_mutex_unlock(&mtx);
18. }
19. static void *thread_func(void *arg)
20. {
21. struct node *p = NULL;
22. pthread_cleanup_push(cleanup_handler, p);
23. while (1)
24. {
25. //这个mutex主要是用来保证pthread_cond_wait的并发性
26. pthread_mutex_lock(&mtx);
27. while (head == NULL)
28. {
29. //这个while要特别说明一下,单个pthread_cond_wait功能很完善,为何
30. //这里要有一个while (head == NULL)呢?因为pthread_cond_wait里的线
31. //程可能会被意外唤醒,如果这个时候head != NULL,则不是我们想要的情况。
32. //这个时候,应该让线程继续进入pthread_cond_wait
33. // pthread_cond_wait会先解除之前的pthread_mutex_lock锁定的mtx,
34. //然后阻塞在等待对列里休眠,直到再次被唤醒(大多数情况下是等待的条件成立
35. //而被唤醒,唤醒后,该进程会先锁定先pthread_mutex_lock(&mtx);,再读取资源
36. //用这个流程是比较清楚的
37. pthread_cond_wait(&cond, &mtx);
38. p = head;
39. head = head->n_next;
40. printf("Got %d from front of queue/n", p->n_number);
41. free(p);
42. }
43. pthread_mutex_unlock(&mtx); //临界区数据操作完毕,释放互斥锁
44. }
45. pthread_cleanup_pop(0);
46. return 0;
47. }
48. int main(void)
49. {
50. pthread_t tid;
51. int i;
52. struct node *p;
53. //子线程会一直等待资源,类似生产者和消费者,但是这里的消费者可以是多个消费者,而
54. //不仅仅支持普通的单个消费者,这个模型虽然简单,但是很强大
55. pthread_create(&tid, NULL, thread_func, NULL);
56. sleep(1);
57. for (i = 0; i < 10; i++)
58. {
59. p = (struct node*)malloc(sizeof(struct node));
60. p->n_number = i;
61. pthread_mutex_lock(&mtx); //需要操作head这个临界资源,先加锁,
62. p->n_next = head;
63. head = p;
64. pthread_cond_signal(&cond);
65. pthread_mutex_unlock(&mtx); //解锁
66. sleep(1);
67. }
68. printf("thread 1 wanna end the line.So cancel thread 2./n");
69. //关于pthread_cancel,有一点额外的说明,它是从外部终止子线程,子线程会在最近的取消点,退出
70. //线程,而在我们的代码里,最近的取消点肯定就是pthread_cond_wait()了。
71. pthread_cancel(tid);
72. pthread_join(tid, NULL);
73. printf("All done -- exiting/n");
74. return 0;
75. }如同进程一样,线程也可以通过信号量来实现通信,虽然是轻量级的。信号量函数的名字都以"sem_"打头。线程使用的基本信号量函数有四个。
- 信号量初始化。
int sem_init (sem_t *sem , int pshared, unsigned int value);
这是对由sem指定的信号量进行初始化,设置好它的共享选项(linux 只支持为0,即表示它是当前进程的局部信号量),然后给它一个初始值VALUE。 - 等待信号量。给信号量减1,然后等待直到信号量的值大于0。
int sem_wait(sem_t *sem); - 释放信号量。信号量值加1。并通知其他等待线程。
int sem_post(sem_t *sem); - 销毁信号量。我们用完信号量后都它进行清理。归还占有的一切资源。
int sem_destroy(sem_t *sem);
#include <stdlib.h>
#include <stdio.h>
#include <unistd.h>
#include <pthread.h>
#include <semaphore.h>
#include <errno.h> #define INTERLOCKEDEXCHANGE(x,y) xchg(x,y)
#define INTERLOCKEDEXCHANGEADD(v,p) __sync_fetch_and_add(&v, p) //v的值原子添加P的大小
#define INTERLOCKEDINCREMENT(t) __sync_fetch_and_add(&t, 1) //原子+1
#define INTERLOCKEDDECREMENT(t) __sync_fetch_and_sub(&t, 1) //原子-1int nRuning = 0;
int bUpdate = 0;#define return_if_fail_void(p) if((p) == 0){printf ("[%s]:func error!/n", __func__);return;}
#define return_if_fail_point(p) if((p) == 0){printf ("[%s]:func error!/n", __func__);return p;}
typedef struct _PrivInfo
{
sem_t s1;
sem_t s2;
time_t end_time;
}PrivInfo;
static void info_init(PrivInfo* thiz);
static void info_destroy(PrivInfo* thiz);
static void* pthread_func_1(void* thiz);
static void* pthread_func_2(void* thiz);
static void* pthread_func_3(void* thiz);
static void* pthread_func_4(void* thiz);
int main(int argc, char** argv)
{
pthread_t pt_1 = 0;
pthread_t pt_2 = 0;
pthread_t pt_3 = 0;
pthread_t pt_4 = 0;
int ret = 0;
PrivInfo* thiz = NULL;
thiz = (PrivInfo*)malloc(sizeof(PrivInfo));
if (thiz == NULL)
{
printf ("[%s]: Failed to malloc priv.\n", __func__);
return -1;
}
info_init(thiz);
ret = pthread_create(&pt_1, NULL, pthread_func_1, (void*)thiz);
if (ret != 0)
{
perror ("pthread_1_create:");
}
ret = pthread_create(&pt_2, NULL, pthread_func_2, (void*)thiz);
if (ret != 0)
{
perror ("pthread_2_create:");
}
ret = pthread_create(&pt_3, NULL, pthread_func_3, (void*)thiz);
if (ret != 0)
{
perror ("pthread_3_create:");
}
ret = pthread_create(&pt_4, NULL, pthread_func_4, (void*)thiz);
if (ret != 0)
{
perror ("pthread_4_create:");
}
pthread_join(pt_1, NULL);
pthread_join(pt_2, NULL);
pthread_join(pt_3, NULL);
pthread_join(pt_4, NULL); info_destroy(thiz);
return 0;
}static void info_init(PrivInfo* thiz)
{
if (thiz == NULL)
{
printf ("[%s]:func error!\n", __func__);
} thiz->end_time = time(NULL) + 60;
sem_init(&thiz->s1, 0, 4);
sem_init(&thiz->s2, 0, 1);
}
static void info_destroy(PrivInfo* thiz)
{
if (thiz == NULL)
{
printf ("[%s]:func error!\n", __func__);
}
sem_destroy(&thiz->s1);
sem_destroy(&thiz->s2);
free(thiz);
thiz = NULL;
}
static void* pthread_func_1(void* thiz)
{ static int snCount = 1;
if (thiz == NULL)
{
printf ("[%s]:func error!\n", __func__);
} PrivInfo* pi = (PrivInfo*)thiz;
while (time(NULL) < pi->end_time)
{
if (bUpdate > 0)
{
//printf("pthread1:start bUpdate=[%d]\n", bUpdate);
goto reload;
}
else
{
INTERLOCKEDINCREMENT(nRuning); //+1
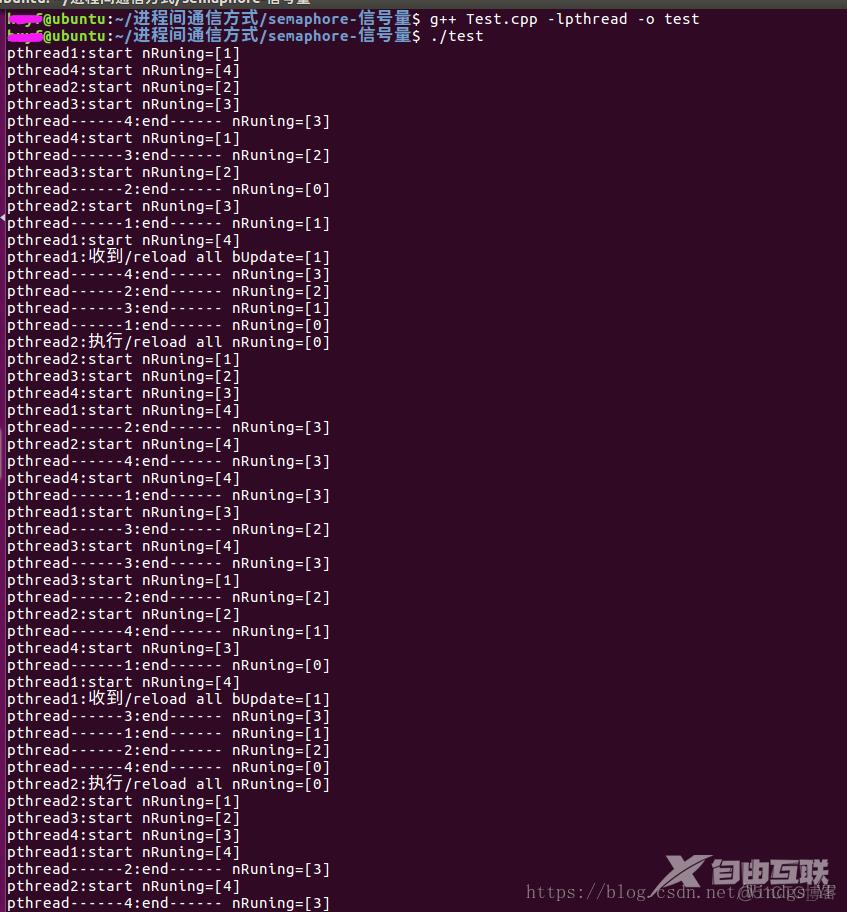
printf("pthread1:start nRuning=[%d]\n", nRuning); INTERLOCKEDINCREMENT(snCount);
if (snCount%3 == 0)
{
INTERLOCKEDINCREMENT(bUpdate);
printf("pthread1:收到/reload all bUpdate=[%d]\n", bUpdate);
} //sem_wait(&pi->s1);
sleep(3);
//sem_post(&pi->s1);
INTERLOCKEDDECREMENT(nRuning); //-1
printf("pthread------1:end------ nRuning=[%d]\n", nRuning);
} reload:
{
sem_wait(&pi->s2);
//printf("pthread1: pthread1 lock\n");
if (nRuning == 0 && bUpdate > 0)
{
sleep(3);
INTERLOCKEDDECREMENT(bUpdate);
printf("pthread1:执行/reload all nRuning=[%d]\n", nRuning);
}
//printf("pthread1: pthread1 unlock\n");
sem_post(&pi->s2);
}
}
return thiz;
}
static void* pthread_func_2(void* thiz)
{
static int snCount = 1;
if (thiz == NULL)
{
printf ("[%s]:func error!/n", __func__);
} PrivInfo* pi = (PrivInfo*)thiz;
while (time(NULL) < pi->end_time)
{
if (bUpdate > 0)
{
//printf("pthread1:start bUpdate=[%d]\n", bUpdate);
goto reload;
}
else
{
INTERLOCKEDINCREMENT(nRuning); //+1
printf("pthread2:start nRuning=[%d]\n", nRuning); INTERLOCKEDINCREMENT(snCount);
//if (snCount%3 == 0)
//{
// INTERLOCKEDINCREMENT(bUpdate);
// printf("pthread2:收到/reload all bUpdate=[%d]\n", bUpdate);
//} //sem_wait(&pi->s1);
sleep(3);
//sem_post(&pi->s1);
INTERLOCKEDDECREMENT(nRuning); //-1
printf("pthread------2:end------ nRuning=[%d]\n", nRuning);
} reload:
{
sem_wait(&pi->s2);
//printf("pthread2: pthread2 lock\n");
if (nRuning == 0 && bUpdate > 0)
{
sleep(3);
INTERLOCKEDDECREMENT(bUpdate);
printf("pthread2:执行/reload all nRuning=[%d]\n", nRuning);
}
//printf("pthread2: pthread2 unlock\n");
sem_post(&pi->s2);
}
}
return thiz;
}
static void* pthread_func_3(void* thiz)
{
static int snCount = 1; if (thiz == NULL)
{
printf ("[%s]:func error!\n", __func__);
} PrivInfo* pi = (PrivInfo*)thiz;
while (time(NULL) < pi->end_time)
{
if (bUpdate > 0)
{
//printf("pthread1:start bUpdate=[%d]\n", bUpdate);
goto reload;
}
else
{
INTERLOCKEDINCREMENT(nRuning); //+1
printf("pthread3:start nRuning=[%d]\n", nRuning); INTERLOCKEDINCREMENT(snCount);
// if (snCount%3 == 0)
// {
// INTERLOCKEDINCREMENT(bUpdate);
// printf("pthread3:收到/reload all bUpdate=[%d]\n", bUpdate);
// } //sem_wait(&pi->s1);
sleep(3);
//sem_post(&pi->s1);
INTERLOCKEDDECREMENT(nRuning); //-1
printf("pthread------3:end------ nRuning=[%d]\n", nRuning);
} reload:
{
sem_wait(&pi->s2);
//printf("pthread3: pthread3 lock\n");
if (nRuning == 0 && bUpdate > 0)
{
sleep(3);
INTERLOCKEDDECREMENT(bUpdate);
printf("pthread3:执行/reload all nRuning=[%d]\n", nRuning);
}
//printf("pthread3: pthread1 unlock\n");
sem_post(&pi->s2);
}
}
return thiz;
}
static void* pthread_func_4(void* thiz)
{
static int snCount = 1; if (thiz == NULL)
{
printf ("[%s]:func error!/n", __func__);
} PrivInfo* pi = (PrivInfo*)thiz;
while (time(NULL) < pi->end_time)
{
if (bUpdate > 0)
{
//printf("pthread1:start bUpdate=[%d]\n", bUpdate);
goto reload;
}
else
{
INTERLOCKEDINCREMENT(nRuning); //+1
printf("pthread4:start nRuning=[%d]\n", nRuning); INTERLOCKEDINCREMENT(snCount);
// if (snCount%3 == 0)
// {
// INTERLOCKEDINCREMENT(bUpdate);
// printf("pthread4:收到/reload all bUpdate=[%d]\n", bUpdate);
// } //sem_wait(&pi->s1);
sleep(3);
//sem_post(&pi->s1);
INTERLOCKEDDECREMENT(nRuning); //-1
printf("pthread------4:end------ nRuning=[%d]\n", nRuning);
} reload:
{
sem_wait(&pi->s2);
//printf("pthread4: pthread4 lock\n");
if (nRuning == 0 && bUpdate > 0)
{
sleep(3);
INTERLOCKEDDECREMENT(bUpdate);
printf("pthread4:执行/reload all nRuning=[%d]\n", nRuning);
}
//printf("pthread4: pthread4 unlock\n");
sem_post(&pi->s2);
}
}
return thiz;
}
/*
int sem_wait(sem_t*sem);intsem_trywait(sem_t *sem);
intsem_timedwait(sem_t *sem, const struct timespec *abs_timeout);
struct timespec
*/